нации импульсов. Соединение элементов в блоке динамической селекции нозволяет оперативно автоматически выделять объекты с анриорно заданными скоростями (диапазоном CKopOiCTefi), автоматически измерять скорость движения и отстраиваться от неннформативных по скорости параметров и объектов динамической ситуации.
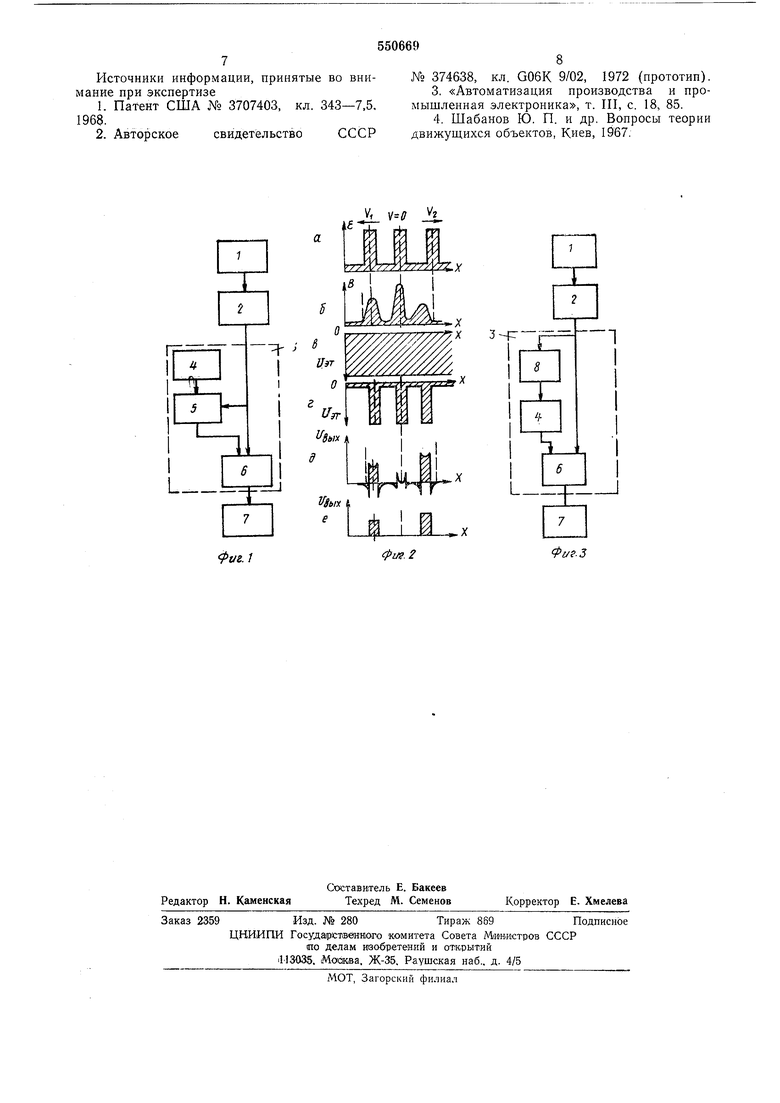
На фиг. 1 изображена блок-схема уст ройства, где 1-блок в;вада данных, 2- модель-аналог, 3-блок ди1на мической селекции, 4-датчик эталонного инверсного уровня, 5-ключевой элемент, 6-Сумматор, 7-блОК вывода информации; на фиг. 2-временные диаграммы работы устройства; на фиг. 3 - вариант реализации устройства, где 8-элемент нелинейного усиления-ограничения .
Блок ввода данных нредназначен для нреобразовалня исходного множества динамических пространственных физических (в частности, онтичеоких) параметров в электрические сигналы оди1на ковой амнлитуды, длительности и нлощади. Блок 1 реализует1ся м атридей ф отоэл ементов.
Требоваине нормируемости исходных параметров но амплитуде, длительности и площади может быть снято, есл-и в блоке 1 предусмотреть стробдрование, .путем использования матрицы импульсных формирователей.
Блок 1 соединен с моделью-аналогом 2, которая представляет собой своеобразный конденсатор, верхняя пластина которого является однородной ирОСтранственной / -средой, а нижняя - электрически заземленная проводящая пластина. Блок 2 1может быть nenpqpbiBHbiM, дискретным или ко-мбинированным в зависимости от того, представлена ли -R-среда непрерывно распределенной пластиной, например электрагкроводной бумагой или дискретной сеткой резисторов, а С-среда - ненре1рывно распределенным диэлектриком или 1кондвнсаторами в узлах среды R.
Блок 2 соединен с блоком динамической селекции 3, реализуемым известны.МИ схемами амплитудных дискриминаторов (селекторов) импулысов. Реализуются такие дискриминаторы -резисторами, конденсатора ми, линиями задержки, диодами. На выходе регистрируется положение выделяемых импульсов.
Использование амплитудного дискр.имвнатора дает преимуще1ство экономичной реализации и рационально в ряде случаев при последовательном выводе информации с модели-аналога. В этом случае блоки 1 и 2 реализуются телевизионной передающей т)убкой, где ;моделью-аналогом служит мишень трубки, с которой сканируется изображение. Причем, в блоке 1 диаметр электрически стробированных импульсов должен быть не больше, чем ширина (ве ртикальные размеры), сканируемой в блоке 2 строки.
Возможна параллельная реализация блоков 1-3 с помощью полупроводниковой слоеной структуры, где блок 3 представляет собой полуправоднижовую емкостно-диодно-резистивную структуру множества амплитудных дискриминаторов 3. Такая реализация имеет преимущестВа в надежности, компактности и
кономичности по сравнению с вакуумными лектронно-оптическими преобразователями.
В ряде случаев использование дискриминаторов импульсов, осОбевно в режимах выделення имнульсов, меньших заданных или
лежащих в заданных пределах, вызывает определенные трудности. Трудности и неэкономичность использования амплитудных дис :риминаторов сказываются при режимах .с изменяемыми порогами селекции. Кроме того,
в некоторых случаях использование телевизионных передающих систем нецелесообразно. Примером служат задачи с неонтичаской исходной информацией, задачи с малы.м числом узловых точек и др. Более рациональным в таких случаях может быть использование элементов 4-G для реализации блока 3.
Эконо.мичная последовательная реализация со сканирава(нием с блока 2 предусматривает в качестве датчика эталонного иеверсного уровня 4 управляемый источник напряжения инверсной полярности по отношению к входным сигналам, в качестве сумматора б- электронный аналоговый сумматор инвероного эталонного и преобразованного на моделианалоге (сигналов.
Перспективно также использование запоминающей электронно-лучевой труб-ки с несколькими электронными прожекторами, один
из которых реализует канал с использованиам датчика этало штого инверсного уровня 4, формирующего сигналы инверсного электронного уровня, а элемент 5 может быть реалиЗ0)ван дополнительным электродом, запирающим путь сигналом датчика 4 при наличии синхронного считываемого сигнала с .моделианалога. Элемент 5 может быть реализован и катушкой электром-арнитного управления с дополнительным формирователем а-милитуды
сигналов. В обоих случаях суммирование нроисходит в накопительном RC-icn-oe запоминающей трубки.
Перспективна и параллельная полупроводниковая реализация всех блоков и узлов
устройства в виде слоенных лолупроводни ковых структур, что имеет известные преимущества безвакуумных электронно-оптических преобразов/ателей, и дает возможность агрегировать и наращивать структуру реализации
для любых объемов исходной информации. На фиг. 3 представлен еще один вариант устройства, отличающийся от (рассмотренного выше использованием в блоке 3 элемента нелинейного усиления - ограничения 8 и датчика эталонного инверсного уровня 4 с соответствующим их включением между блоками 2 и 6. Причем элемент 8 пре(Дставлен известными схема1ми электрО|Ных усилителей верхней чаСти сигнала с ограничением выходного сигаала сверху и снизу. Его функцией является формирование стробов на месте амплитудных максимумов сигналов для соответствующего включения датчика эталовного ин верС1юго уровня 4..Такая реализация дает возможнасть повысить надежность и точность измерения скорости лри более четком вычитании базового сигнала с датчика 4 и преобразованного с блока 2 сигналов в сумматоре 6. Кроме райсмотренной, для схемы фиг. 3 возможна безвакуум ная полупроводниковая реализация, а также реализации на базе различ ных известных электронных схем, выполняющих функции блоков 1, 2, 7 и элементов 4-6. Работа устройства (фиг. 1) происходит согла|Сно фиг. 2, где диаграмма а - д иллюстрируют амплитудный срез сигналов для блоков 1-3, 7 и элементов 4-6 соотаетственно. При включении устрой ства сигналы динамической ситуации преобразуются блоком 1 в пространственную двухмерную решетчатую функцию электрических сигналов одинаковой амллитуды, длительнасти и площади стимула (фиг. 2а). Затем эти сигналы накапливаются в емкостной составляющей и растекаются в среде R. При этом растекание зарядов (согласно фиг. 26) для движущихся и ненодвижных объектов имеет фазлич ный характер по площади, форме и амплитуде. Это является результатом Простейщей формальной реализации математической модели , дх d(/2 дх + В кЕ, где: а - постоя1нная инерции, b - постояиная иррадиации, V - юкорость движения, k - коэффициент пропорциональности, В - оветлота полученного на модели-аналоге преоб|разования, Е - яркость исходных сигналов. С модели-аналога 2 сигналы потенциальБого рельефа динамической преобразованной ситуации поступают на вход блока динамической селекции, реализуемого амплитудным дискриминатором импульсов, который выдает на вход блока 7 сигналы априорно заданных амплитуд, соответствующих скоростям исходных объектов (фиг. 2е). При реализации блока 3 элементами 4-6 сигналы с блока 2 поступают на вход сумматора 6 и на управляющий вход элемента 5. Согласно фиг. 2 элемент 5 (см. фиг. 2г) открывается для сигналов (в) от датчика 4сигнала.ми (б) блока 2 и пропускает эталон1ные сигналы (г) на второй вход сумматора 6. С выхода сумматора 6 сигналы (д) регистрируются блоком 7. Режим измерения соответствует наличию в датчике 4 эталонного уровня, соответствующего амплитуде сигналов стационарных объектов. При изменении (уменьщении) эталон+ного уровня в датчике 4 .происходит режим по скорости. При этом блок 7 регистрирует и измеряет только амплитуды сигналов от объектов, движущихся в заданном диапазоне око-ростей по их положительной части, определяемой сигналами датчика 4. Таким образом, на выходе уст1ройства |В блоке 7 по ам плитуде и площади сигналов движущихся объектов с блока 2 происходят оперативные автоматические измерения и селекция по скорости множества объектов, движущихся в различных направлениях. Работа устроЙ Ства, показанного на фиг. 3, принципиально мало отличает1ся от схемы, показанной на фиг. 1, и поэтому не рассматривается. Возможна работа устройства как в режиме чистой отстрой|ки от всех неинформатнвных но скорости нараметров и объектов, так и наложение яркостных параметров скорости на отображенные блоком вывода пространственные объекты, полученные от блока ввода или других устрой1ст1В инфор)мацион1ного преобразования. Технико - зконо1мичеокие преимущества предлагаемого изобретения состоят в следующем: высокое быстродействие, определяемое в основном парамет|рами R, С модели-аналога, что позволяет оперативно выделять объекты практически с любой скоростью движения; полностью автоматический цикл селекции и отстройки от неинфорамативных параметров и объектов; универсальность ввода объектов: а) конфигураций, площадей, яркостей и связанности объектов за счет входного нормирующего преобразования по амплитуде, длительности и площади стимула в блоке ввода; б) направлений движения; в) количеств объектов; г) физической природы исходных сигналов, т. е. реализация устройства при тех же функциях блоков и их связях может быть как электрической, так и электронно-оптической, оптической, пневматической и т. д. Фо1р,мула изобретения Устройство для регистрации подвижных объектов в зависимости от скорости движения, содержащее блок ввода данных, выход которого подключен ко входу модели-аналога, и блок вывода информации, отличающееся тем, что, с целью повыщения эффективности устройства, в него введен блок динамической селекции, выполненный на сумматоре, ключевом элементе, датчике эталонного инвероного уровня, выход которого соединен с первым входом ключевого элемента, выход которого подключен к первому входу сумматора, второй вход которого и второй 1ВХОД ключевого элемента соединены с выходом модели-апалога, выход сумматора подключен ко входу блока вывода информации.
7
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3707403, кл. 343-7.5, 1968.
2.Авторское свидетельство СССР
№ 374638, кл. G06K 9/02, 1972 (прототип).
3.«Автоматизация производства и промышленная электроника, т. III, с. 18, 85.
4.Шабанов Ю. П. и др. Вопросы теории движущихся объектов, Киев, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования и оценки статистических параметров | 1983 |
|
SU1173425A1 |
| СПОСОБ РЕГИСТРАЦИИ СЛАБЫХ СВЕТОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2190196C1 |
| СПОСОБ ДИАГНОСТИКИ ФОРМООБРАЗОВАНИЯ ПРИ СВАРКЕ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2127177C1 |
| СПОСОБ ДИАГНОСТИКИ ИНДУКЦИОННОЙ ПАЙКИ | 1998 |
|
RU2132262C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Способ регистрации интенсивности излучения и устройство его реализации в виде счетчика фотонов с коррекцией мертвого времени | 2020 |
|
RU2743636C1 |
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2144217C1 |
| СПОСОБ ДИАГНОСТИКИ КОНТАКТНОГО ОРЕБРЕНИЯ | 1998 |
|
RU2133180C1 |
| СПОСОБ ДИАГНОСТИКИ КОНТАКТНОЙ СВАРКИ | 1998 |
|
RU2133179C1 |
| Устройство для классификации изображений микрообьектов | 1976 |
|
SU650086A1 |
ф11г.1
V, м.о А
Фг/г-3
(pus. 2
