ния, соединенным с органом задания, и суммирующий элемент с двумя входам и одним выходом, причем к его первому входу подключен узел компенсации статизма, к- второму - механизм управ ления, выход - к золотнику управляющего органа, а электрогидравлическая система подключена к второму входу управляющего органа.
4.Устройство по п.З, отличающееся тем, что задатчик сигнала управления связан с органом задания через механизм управления.
5.Устройство по пп. 3 и 4, о т личающееся тем, что механизм управления выполнен в виде сервомотора, снабженного золотником- с электрическим приводом.
6.Устройство по nii.3-5, отличающееся тем, что сервомотор механизма управления соединен с .органом задания, а выход суммирующего элемента связан с золотником управляющего органа при помощи односторонних упоров.
7.Устройство по пп. 3,5 и 6, отличающееся тем, что Орган задания выполнен в виде электрогидравлического следящего привода снабженного задатчиком частоты вращения, дополнительным золотником и гидравлическим исполнительным сервомотором задания, управляющая полость которого соединена с /дополнительным золотником при помощи канала.
8.Устройство по пп. 3,5-7, отличающееся тем, что задатчик сигнала управления подключен к задг.тчику частоты вращения следящего привода.
9.Устройство по пп. 3,5,7, о т лич ающееся тем, что в канале установлен вспомогательный золотник,- связанный с задатчиком сигнала управления.




| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор скорости непрямого действия для двигателя внутреннего сгорания | 1977 |
|
SU748024A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ПАРОВОЙ ТУРБИНЫ | 1992 |
|
RU2031211C1 |
| Двухимпульсный регулятор скорости | 1972 |
|
SU470796A1 |
| Двухканальная система топливопитания и регулирования газотурбинного двигателя | 2019 |
|
RU2700989C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКОГО ПРИВОДА РЕГУЛИРУЮЩЕГО ОРГАНА | 2008 |
|
RU2366820C1 |
| Система дистанционного управленияСудОВОй СилОВОй уСТАНОВКОй | 1979 |
|
SU822146A1 |
| Система автоматического управления дизелем | 1989 |
|
SU1740733A1 |
| Регулятор скорости непрямого действия для двигателя | 1971 |
|
SU507703A1 |
| Регулятор частоты вращения и нагрузки дизеля | 1984 |
|
SU1254189A1 |
| Двухканальная система топливопитания и регулирования газотурбинного двигателя (ГТД) | 2018 |
|
RU2680475C1 |


1. Способ резервирования электрогидравлической системы регулирования частоты вращения преимущественно двигателя внутреннего сгорания, заключающийся в том, что вырабатывают сигнал электрогидравлической системы, на вход гидромеханического регулятора подают сигнал задания, вырабатывают сигнал ошибки, равный разности между сигналом задания и сигналом, соответствующим замеренной частоте вращения двигателя, и сигнал, пропорциональный сумме сигнала ошибки и интеграла от сигнала ошибки, и воздействуют при помощи исполнительного сервомотора ни орган топливоподачи двигателя, отличающийс я тем, что, с целью повьшгения экономичности и надежности двигателя, вырабатывают сигнал управления, при помощи которого включают электрогидравлическую систему и одновременно отключают гидромеханический регуля ор путем выбора из сигналов управления и задания максимального сигнала, формирования первого сигнала рассогласования, равного разности между мак симальным сигналом и сигналом, соответствующим замеренной частоте вращения двигателя, второго сигнала рассог ласования, равного алгебраической сумме сигналов управления и интервала от сигнала ошибки, придания величине сигнала ошибки, меньшего из значений первого и второго сигналов рассогласования, причем на второй вход исполнительного сервомотора подают сигнал электрогидравлической системы. (О 2.Способ ПОП.1, отличающийся тем, что, с целью исключения влияния гидромеханического регулятора на работу электрогидравлической системы во всем диапазоне изменения частоты вращения двигателя, сигнал управления по величине подают с sl превьш1ением максимального значения 4 сигнала задания. сл 3.Устройство для резервирования электрогидравлической системы регусо лирования частоты вращения преимущественно двигателя внутреннего сгорания, содержащее гидромеханический регулятор, снабженный измерителем частоты вращения, сочлененным с первым входом управляющего органа с золотником, связанным с узлом компенсации статизма и исполнительным сервомотором, отличающееся тем, что, с целью повьппения экономичности и надежности двигателя, оно дополнительно содержит механизм управления с задатчиком сигнала управле
Изобретение относится к машиностроению, в частности, к дьигателестроению,а именно к способу и устройствам резервирования электрогидравлической системы регулирования частоты вращения преимущественно внутреннего сгорания.
Цель изобретения - повьш1ение экономичности и надежности двигателя путем обеспечения всережимной работы
резервного регулирования и использования одного исполнительного сервомотора.
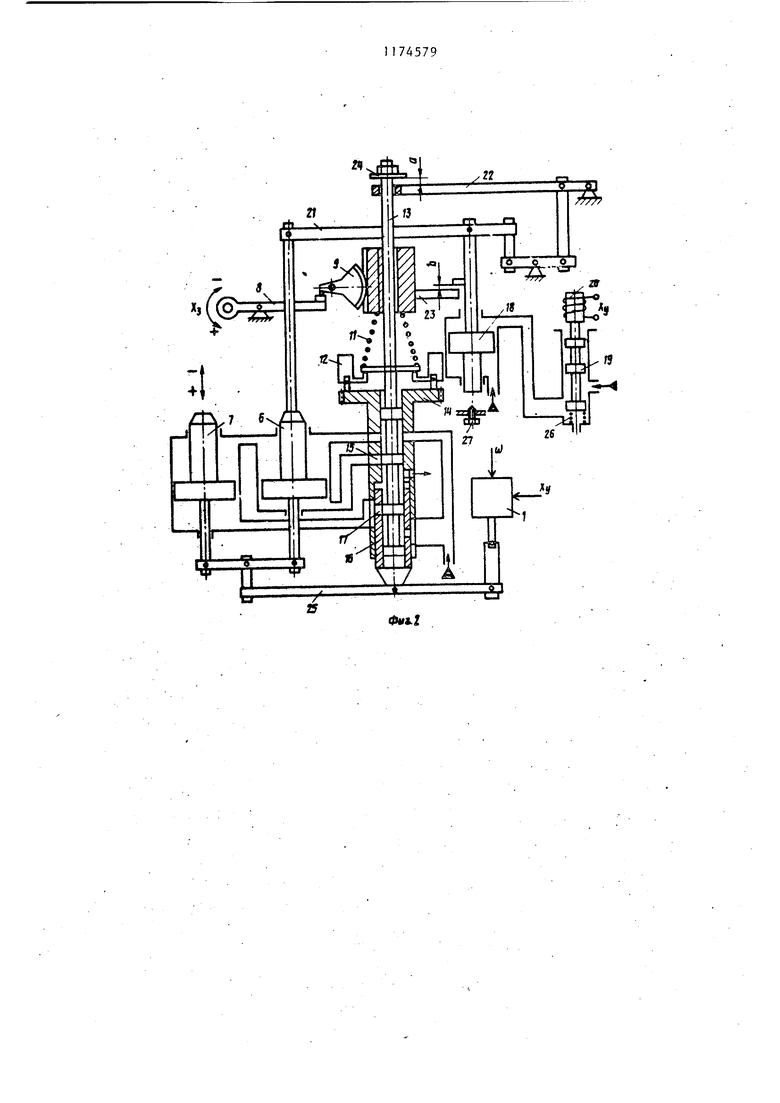
На фиг.1 представлена блок-схема системы регулирования; на фиг.2 первьй вариант устройства, реализующего способ резервирования; на фиг,3 второй вариант устройства, реализующего способ резервирования; на фиг.4 вариант выполнения органа задания.
Система регулирования (фиг,1)содержит э-лектрогидравлическую систему 1 и резервный регулятор, состоящий из первого селектора 2, первого сумматора 3, второго селектора 4, второго сумматора 5, интегратора 6 (устройства компенсации статизма)
и исполнительного сервомотора 7, имеющего первый и второй входы.
На вход первого селектора 2 постуnaJ T г-игналы задания х и управления х.. Селектор 2 производит операцию выбора макс, (х-, Хц). Поскольку сигнал Xij превышает максимальный сигнал х, то выходной .сигнал селектора 2 равен х при отсутствии сиг:нала управления и Xj при его подаче. Первый .сумматор 3 измеряет первый сигнал рассогласования л между выходным сигналом первого селектора 2 и фактической частотой вращениям двигателя. Одновременно во втором сумматоре 5 формируется второй сигнал рассогласования как алгебраическая сумма сигнала управления Хм, сигнала х интегратора 6 и постоянной составляющей а. Сигналы рассогласования а и 8 пос-тупают во второй селектор 4, выходной сигнал которого является сигналом ощибки . Второй селектор 4 производит операцию выбора мин (A,S), т.е
8fu, при ti с: 8 , при S : . Способ реализуется следующим образом. На первый вход 8 исполнительного сервомотора 7 подают выходной сигнал электрогидравлической системы 1, на второй вход 9 - сигнал, пропорциональньй сумме сигнала ошибки и интеграла от сигнала ошибки х|, а исполнительным сервомотором 7 управляю органом /непоказан) топливоподачи двигателя. При работе электрогидравлической системы 1 ее выходным сигналом через сервомотор 7 управляют органом топливоподачи двигателя, а с целью исключения влияния резервного регулятора на работу всей системы величине сигнала ошибки и величине интеграла от сигнала ошибки х; задают постоянное значение. Дпя этого подают сигнал управления хи на электрогидра лическую систему 1, на вход второго сумматора 5 и через первый селектор 2 наВХОД первого сумматора 3. Сигнал Хи включает в работу электрогидравлическую систему 1. Параметр а выбран таким образом, что в этом слу чае л 8 и сигнал ошибки вторым се лектором 4 приравнивается второму сигналу рассогласования благодаря чему интегратор через второй сз мматор 5 и второй селектор 4 охватывает ся жесткой отрицательной обратной связью. Вследствие этого сигнал ошиб ки g становится равным нулю, а выход-35 ной сигнал X интегратора - постоянной величине, определяемой уровнем сигнала Хц и параметра а . При необходимости включения в работу резервного регулятора, например,40 ком в связи с отказом электрогидравлической системь, последнюю отключают, снимая сигнал управления Хц. При этом сумматора 5 и первого селектора 2. 45 В этом случае сигнал ошибки f селектором 4 приравнивается первому сигналу рассогласования, обратная связь интегратора 6 разрывается. Сигнал ошибки 6 , изменяясь в соответ50
ствии с разностью сигнала задания Xj .и фактической частотой вращения двигателя, поступает на второй вход 9 сервомотора 7,на который заводится также интеграл х от сигнала ошибки. Сумма указанных сигналов f и 5 управляет-сервомотором 7, который перемещает орган топливоподачи двигателя
Устройство работает следующим образом.
При необходимости осуществления ре зервного регулирования, связанного, например, с отказом основной электрогидравлической системы 1, снимается сигнал управления Хи, который отключает электрогидравлическую систему 794 при наличии рассогласования л . Частота вращения двигателя определяется уровнем сигнала задания х,, который изменяется от минимального до максимального в зависимости от условий работы двигателя.. Таким образом обеспечивается всережимность резервного регулирования. Первый вариант устройства (фиг.2), реализующего предложенный способ, содержит задатчик сигнала управления (не показан), формирующий сигнал управления Ху, задающий рычаг 8, воздействующий через сектор 9 на орган 10 задания измерителя скорости, выполненный в виде стакана и задающий натяжение всережимной пружины 1I, измеритель 12 скорости, управляющий орган, содержащий золотник 13, буксу 14 с управляющим окном 15, втулку 16 с управляющим окном 17, перемещающуюся в буксе 14, устройство 6 компенсации статизма (интегратор), представляющее собой сервомотор дифференциального типа, управляющая (нижняя) полость которого соединена с окном 15 буксы 14, исполнительный сервомотор 7 также дифференциального типа, управляющая полость которого соединена с окном 17 во втулке 16, механизм управления, выполненный в виде сервомотора 18 дифференциального типа, управляющая (верхняя) полость которого соединена золотником 19 с электрическим приводом 20, суммирующий элемент, выполненный в виде суммирующего рычага 2 I , соединенного с сервомотором 6, сервомотором 18 и взаимодействующего через рьтажную передачу 22. с золотни13. Сервомотор 18 воздействует на стакан 10, а рычаг 22 - на золотник I3 с помощью односторонних упоров 23 и 24, жестко связанных соответственно со стаканом 10 и золотником 13. Сервомоторы 6 и 7 электрогидравлической системы 1 сочленены с втулкой 16 рычажной передачей 25. Измеритель 12 скорости получает вращение От коленчатого вала двигателя .(привод измерителя скорости не показан). , I, переводя ее выходной орган в фиксированное положение, и обесточивает электромагнит 20, в результате чего золотник 19 с электрическим приводом под действием пружины 26 перемещается вверх, соединяя управляющую верх нюю) полость сервомото.ра 18 со сливом. Сервомотор 18 под действием дав ления, поступающего в нижнюю полость перемещается вверх до механического упора, поднимая; суммирующий рычаг 21 вверх, а рычаг 22 вниз, и освобождает стакан 10 и золотник 13. Между ры чагом 22 и упором 24 и сервомотором 18 и упором 23 образуются соответственно зазоры а, и в. Положение стака на 10, а следовательно, и усилие все релсимной пружины 11 определяется сиг налом х задающего рычага 8. На уста новившемся режиме работы двигателя усилие всережимной пружины 11 равно центробежной силе измерителя 12 скорости, и золотник 13, сочлененный с измерителем 12 скорости, находится в равновесном (среднем) положении, при котором он своими управляющими поясками перекрывает управляющие окна 15 в буксе 14 и окна 17 во втулке 16, вследствие чего сервомоторы 6 и 7 неподвижны и занимают положение,при .котором подача топлива в двига, тель соответствует нагрузке. При изменении сигнала задания Xj, например, в сторону увеличения сектор 9 через стакан 10 затягивает всережимную пружину 11, равновесие золотника 13 нарушается и он опускается вниз, -соединяя упра:вляющую полость сервомотора 6 через окно 15 с напорной полостью, а управляющую полость сервомотора 7 через окно 17 со сливной. Движение сервомотора 6 через рычажную передачу 25 передается втулке 16, -которая под действием сервомотора 6 еще больше открывает окно 17. Сервомотор 7 смещается вниз и перемещает орган топливоподачи двигателя в сторону увеличения подачи топлива. Частота вращения двигателя возрастает до тех пор, пока центробежная сила измерителя 12 не станет равной усилию пружины 11 и зо лотник не перекроет регулирующее окно 15, При этом втулка 16 также занимает исходное положение под действием обратной связи от сервомотора 7,осуществляемой через рычажную передачу 25. При нарушении равновесия, связанном, например, с увеличением нагрузки на двигатель, частота вращения уменьшается, и золотник 13 смещается вниз. При этом так же, как описано вьппе, сервомотор 7 увеличивает подачу топлива до тех пор пока частота вращения не восстановится. На новом установившемся режиме золотник 13 и втулка 16 занимают исходное состояние, смещение сервомотора 7 в сторону подачи топлива скомпенсировано пропорциональным перемещением сервомотора 6, При этом исключается влияние сервомотора 6 на положение золотника 13, так как между рычагом 22 и упором 24 имеется зазор а при всех положениях сервомотора 6. При работе основной электротидравлической системы 1 задатчик сигнала управления подает сигнал управления X у, который включает злектрогидравли ческую систему и одновременно ,запитывает электромагнит 20, который опускает золотник 19 вниз. Золотник 19 соединяет управляющую полость сервомотора 18 с напорной масляной магистралью, и сервомотор 18 перемещается вниз. При перемещении вниз сервомотор выбирает зазор в и смещает стакан 10, который затягивает пружину 11. Ход сервомотора 18 регулируется винтом 27 и выбирается таким, чтобы усилие пружины 11 под действием перемещения стакана 10 от сервомотора 18 бьшо больше на 5-10%, чем от максимального сигнала задания xj. При этом сектор 9 поворачивается по часовой стрелке, и его левьй упор отрывается от задающего рычага 8.Однако золотник 13 в этом случае не смещается вниз, так как сервомотор 18 одновременно через суммирующий рычаг- 21 поднимает рычаг 22, который выбирает зазор а и, воздействуя на упор 24, поддерживает золотник в среднем положении. Таким образом,, сервомотор 6 посредством рычага 2 1 , рычажной передачи 22 и упора 24 охватывается жесткой отрицательной обратной Связью, благодаря чему он занимает строго определенное положение , а золотник 13 - среднее положение, при котором его рабочий поясок перекрывает управляющее окно 15 в буксе 14, Если под дейстнигем сервомотора 18 золотник 13 оказывается не в среднем положении, а например, выше, то он через окно 15 сообщает управляющую полость сервомо тора 6 со сливом и сервомотор 6 перемещается вниз, устанавливая золотник 13 в исходное среднее положение через рычаг 21 и рычажную передачу 22. Положение сервомотора 6 в дальнейшем не изменяется, так как оно определяется постоянными величинами, а именно: ходом сервомотора 18, параметрами рычажных передач 21 и 22 и положением упора 24 относительно золотника 13. Таким образом, золотник 13 и сервомотор 6, определяющие соответственно сигнал ошибки (фиг.) и интеграл х, от сигнала ошибки, занимают строго определенное положение и не влияют ка работу электрогидравлической системы 1. Для . электрогидравлической системы I в качестве исполнительного механизма используется сервомотор 7 (фиг.2) резервного регулятора. В этом случае сервомотором 7 управляет втулка 16.. На установившемся режиме она занимает среднее положение и окно 17 перекрыто пояском золотника 13. При изменении выходного сигнала электрогидравлической системы 1, связанным, например, сизменением нагрузки двигателя, выходной орган электрогидравлической системы 1 перемещает, например вниз, правый конец рычага 25 и втулку 16, окно 17 которой, а следовательно, и управляющая полость сервомотора 7 соединяются с напорной магистралью. Сервомотор 7 перемещается вверх, уменьшая подачу топлива в двигатель, и возвращает через рычажную передачу. 25 втулку 16 в исходное состояние,
Второй вариант устройства (фиг.З) отличается тем, что сервомотор 18 механизма управления воздействует только на сзгммирукщий рычаг 21, а орган задания выполненв виде электрогидравлического следящего привода, включающего гидравлический исполнительный орган 10 задания (сервомотор), управляющая (верхняя) полость которого соединена с дополнительным золотником 28. Сервомотор задания 10 охвачен отрицательной обратной связью через тягу 29 и рычаг 30, средняя точка которого связана с треугольной пластиной 31, перемещающейся под действием эле тромагнитов 32, подключ1 нньгх к задат чику 33 скорости. На задатчик 33 ско рости воздействует сигнал заданияхj и может также воздействовать задатчик сигнала управления хи. Остальные элементы устройства те же, что на фиг.2, на фиг.З не показаны.
Устройство работает следующим образом.
При работе резервной системы сигнал Хц отсутствует, сервомотор 18 находится на верхнем упоре, между упором 24 и рычагом 22 имеется зазор Q, Сигнал х задает комбинацию включения электромагнитов 32 (кроме комбинации, при которой включены все магниты, определяющую положение сервомотора 10, натяжение всережимной пружины.11 и, следовательно, частоту вращения двигателя.
На установившемся режиме дополнительный золотник 28 перекрывает управляющую полость сервомотора 10, вследствие чего он неподвижен, а частота вращения двигателя соответствует натяжению всережимной пружины 11. При необходимости изменения частоты вращения, например в сторону увеличения, сигналом х задается другая комбинация включения электромагнитов 32, под действием которых треугольная пластина 31. через рычаг 30 опускает вниз дополнительный золотник 28, соединяющий управляющую полость сервомотора 10 с напорной . масляной магистралью. Сервомотор 10 под действием давления масла опускается вниз, сжимает всережимную пружину 1 1 и одновременно через тягу 29 и рычаг 30 возвращает дополнительный зйлотник 28 в исходное положение, после чего он останавливается
Возросшее усилие всережимной пружны 11 нарушает равновесие золотника 13, в результате чего он опускается вниз, а сервомотор 7 (фиг.2, как это Описано вьщге, смещается в сторону увеличения подачи топлива, при этом частота вращения двигателя возрастает до значения, при котором золотник 13 занимает исходное среднее положение. Так осуществляется позиционное резервное всережимное регули рование частоты вращения.
При работе, электрогидравлической системы задатчик сигнала управления вьфабатьгаает сигнал управления х,.. Под действием сигнала Хц эадатчик 33 скорости (фиг.З) запитьюает все электромагниты 32, треугольная пластина 3 опускается вниз, смещая также вниз золотчик 28, в результате чего сервомотор i О под действием давления масла движется вниз, сжимает всерезкимную пружину 11 и через тягу 29 и рычаг 30 возвращает дополнительный золотник 28 в исходное состояние. Сервомотор Ю под действием сигнала управления Хц, когда запитываются все электромагниты 32, смещается на 510% больше, чем от максимального сигнала х, при работе резервной системы. Поэтому измеритель 12 скорости (фиг.2) не влияет на работу, так как его центробежная сила в рабочем диапазоне частот вращения двигателя меньше усилия всережимной пружины 11. В остальном работа устройства айалогична описанию первого варианта выполнения (фиг. 2 ).
На фиг.4 эадатчик сигнала управления X ц воздействует на орган задания через вспомогательный золотник 34, включенный в канал, соединяющий управляющую полость сервомотора 10 задания с дополнительным золотником 28.
При работе резервного регулятора электромагнит 35 обесточен, вспомогательньй золотник 34 пружиной 36 смещен вниз и соединяет управляющую полость сервомотора 10 с дополнительным золотником 28. Положение сервомотора 10 определяется выходным сигналом . задатчика 33 скорости (комбинацией включения электромагнитов 32).
При подаче сигнала управления х
У
вспомогательный золотник 34, смещаяс вверх, соединяет управляющую полость сервомотора 10 с напорной масляной магистралью, под действием которой он смещается вниз. Величина его смещения регулируется упором 37. В остальном работа устройства аналогична работе второго варианта вьтолнения (фиг.З).
| Бюллетень фирмы Вудворд, США, № 82504 А, опублик 1969. |
