1
Изобретение относится к автоматике и вычислительной технике и может быть использовано для связи аналоговых источников информации с цифровым вычислительным устройством.
Целью изобретения является повышение ресурса работы преобразователя угла поворота вала в код.
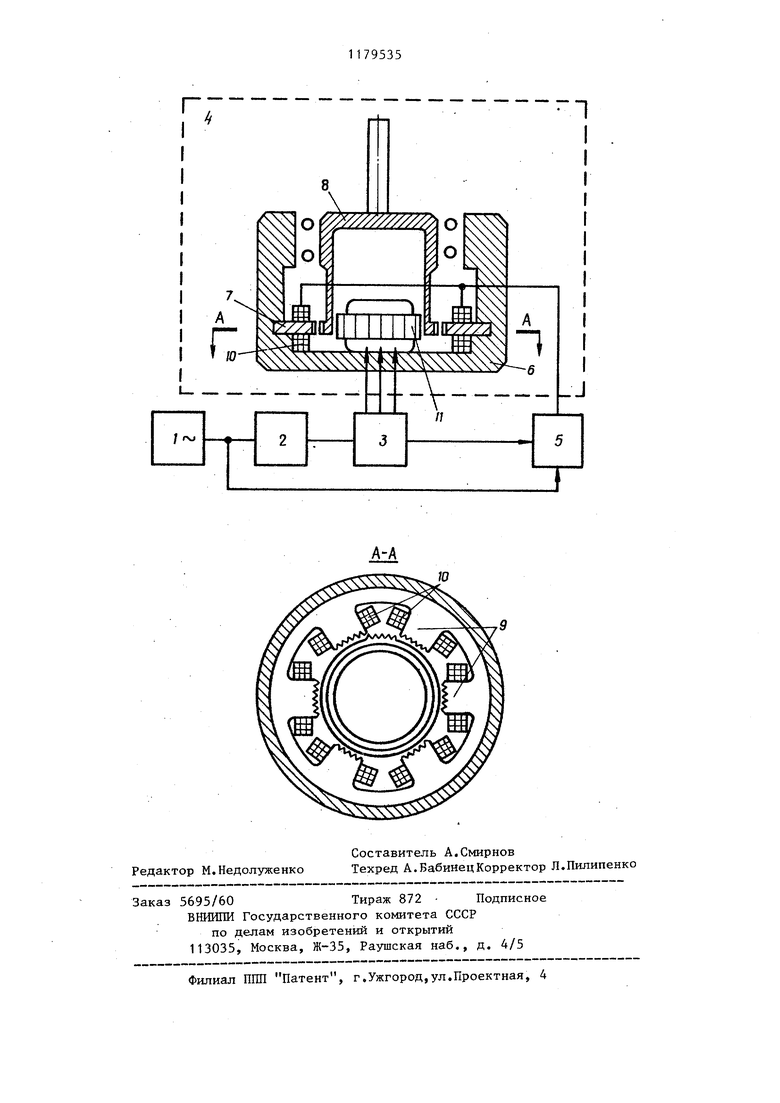
На чертеже представлена структурная схема преобразователя.
Преобразователь угла поворота вала в код содержит генератор 1, выход генератора 1 через делитель 2 частоты подключен к формирователю 3 напряжений питания, выход которого подключен к входам датчика 4 угла, выход датчика 4 угла подключен к информационному входу блока 5 преобразования сдвига фазы в код, тактовый вход которого соединен с генератором 1, выход формирователя 3 напряжения питания подключен к опорному входу блока 5 преобразования сдвига фазы в код.
Датчик 4 угла содержит установленный в корпусе 6 зубчатьй статор 7 с внутренними зубцами и укрепленный на валу безобмоточный ротор 8 с внешними зубцами, обращенными к статору 7, статор 7 вьшолнен в виде четного числа р зубчатых секторов 9, равномерно расположенных по окружности на расстоянии ii относиРтельно друг друга, в пазы секторов
статора 7 положена обмотка 10, выводы которой являются выходом датчика 4 угла, многополюсньш модулятор 11, установленный с зазором концентрично внутри ротора 8, ротор 8 выполнен в виде тонкостенного стакана из jrnpyroro ферромагнитного, предварительно намагниченного материала, зубцовые шаги Доб ротора и статора выполнены равными, каждьй зубчатый сектор 9 статора 7 смещен по углу относительно соседнего зубйчатого сектора на величину
D
а выводы модулятора 11 являются входами датчика 4 угла.
Преобразователь работает следующим образом.
Переменное напряжение от генератора 1 поступает на делитель 2, ко- зффициент деления которого определяется числом разрядов точного отсчета угла. После делителя 2 переменное напряжение поступает на формирова352
тель 3, коэффициент деления которого равен числу пар полюсов модулятора 11. На выходе формирователя 3 образуется многофазное напряжение, которьм запитывается модулятор 11. Вращающееся магнитное поле, образуемое многополюсным модулятором 11, приводит к деформации гибкой стенки ротора 8 (бегущей волне)
с частотой многофазного напряжения, поступающего на модулятор 11. Изменение зазора между зубьями ротора 8 и секторов 9 статора 7 приводит к изменению магнитного потока, охватывающего каждую сигнальную обмотку 10, вследствие чего в каждой сигнальной обмотке 10 наводятся переменные напряжения, величина которых пропорциональна расстоянию
между зубьями ротора 8 и статора 7 и угловому положению зубьев ротора 8 относительно зубьев секторов 9 статора 7. Под действием вращающегося магнитного поля модулятора 11
стенка ротора 8 изгибается по синусоидальному закону (если развернуть модулятор 11, ротор 8 и статор 7 в линию, то при работающем модуляторе 11 стенка ротора 8 в каждый
момент времени будет занимать положение синусоиды, удаленной от линии статора 7 на величину зазора между зубьями статора 7 и недеформированного ротора 8). Расстояние между зубьями ротора 8 и зубьями
каждого сектора статора 7 в момент времени t можно определить по формуле:
8 8oJ Um5in al4i -0,
где Sg - зазор между зубьями статора и недеформированного ротора ,
S2 - частота питания модулятора 1 1 ;
m - коэффициент модуляции к - порядковый номер сектора 9 статора 7 (к 1,2,3,.,.р). Величина переменных напряжений в каждой сигнальной обмотке (без учета остаточных напряжений) в момент времени t будет
U, Uo Hr«s;n nb(
где UQ - амплитуда переменного напряжения в сигнальной обмотке при расстоянии между зубьями ротора и зубьями соответствующего сектора статора равном 8,, . При вращательном движении ротора 8 величины мгновенных напряжений в сигнальных обмотках будут
U,lJo lm5;r jlblKM)- lj5 n cJo-fc+(KM)
где OQ - частота движения зубьев при вращении ротора.
/ ,ч
Фазовый угол (к-1; множитеГ 2ii
ля sin Wpt+Ck-l)J вызван смещением зубьев каждого сектора статора
U06
относительно друг друга на част
р
шага. В результате сложения напряжений сигнальных обмоток при симмет- , ричной системе, т.е. при четном числе секторов статора, размещенных равномерно по окружности, суммарное напряжение будет.
U5- |Uo lC05i - oH.
Таким образом, поворот ротора сдвигает фазу суммарного напряжения сигнальных обмоток по отношению к опорному (напряжению питания модулятора 11). Поворот ротора 8 на один зуб сдвигает фазу суммарного сигнального напряжения на ЗбО (G3(jt 2ii). Блок 5, управляемый опорным и сигнальным напряжениями и заполняемьм от генератора 1, фиксирует угол поворота ротора 8 в цифровой форме.
Достоинством такого преобразователя является простота, долговечность, высокая разрешающая способность, высокая точность.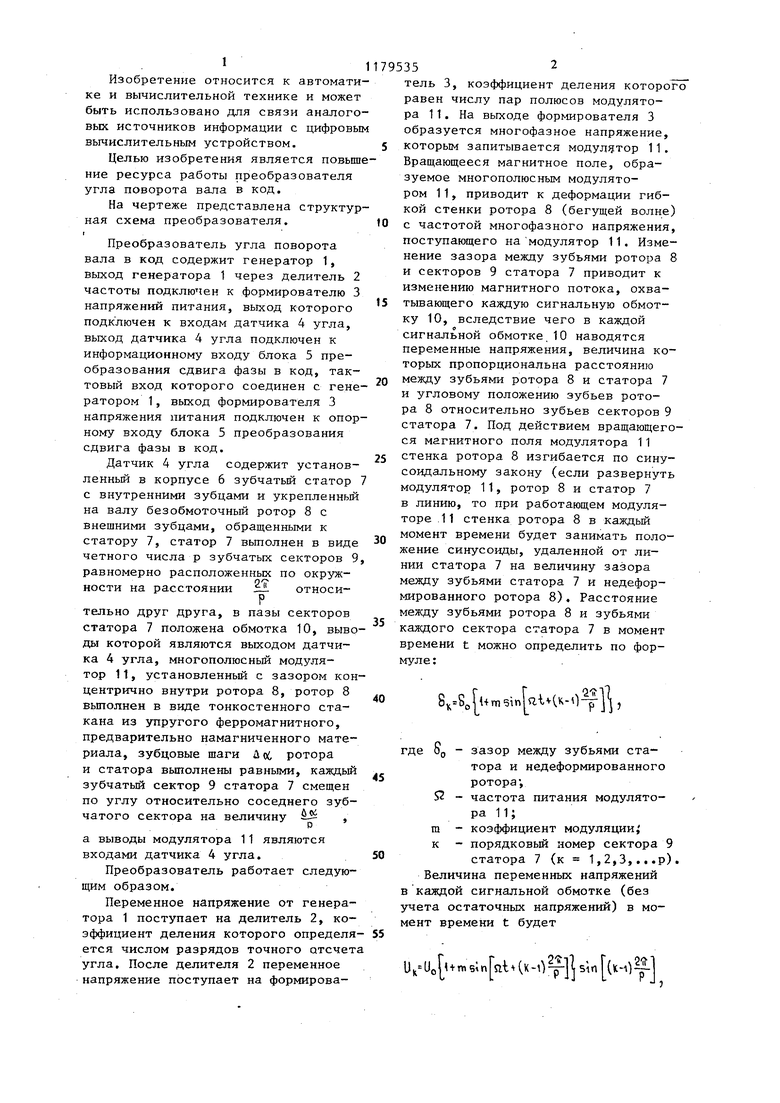
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь углового положения вала в фазу | 1983 |
|
SU1091203A1 |
| Преобразователь угла поворота вала в код | 1973 |
|
SU503268A1 |
| СОВМЕЩЕННЫЙ ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2309517C1 |
| Преобразователь угла поворота в фазу | 1980 |
|
SU902042A1 |
| Датчик положения ротора вентильного двигателя | 1978 |
|
SU748701A1 |
| Двухфазный двоичный датчик угла | 1978 |
|
SU758411A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942091A1 |
| Многополюсный двухфазный датчик угла | 1977 |
|
SU736283A1 |
| Многополюсный двоичный двухфазный бесконтактный датчик | 1985 |
|
SU1377973A1 |
| Датчик угла поворота вала | 1977 |
|
SU705261A1 |
1. ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД, содержащий генератор, выход генератора через делитель частоты подключен к формирователю напряжения питания, выход которого подключен к входам датчика угла, выход датчика угла подключен к информационному входу блока преобразования сдвига фазы в код, тактовый вход которого соединен с генератором, отличающийся тем, что, с целью повышения ресурса работы преобразователя, выход формирователя напряжения питания %;... о - / подключен к опорному входу блока преобразования сдвига фазы в код. 2. Преобразователь по п. 1, отличающийся тем, что датчик угла содержит установленный в корпусе зубчатьй статор с внутренними зубцами и укрепленный на валу безобмоточный ротор с внешними зубцами, обращенными к статору, статор выполнен в виде четного числа р зубчатых секторов, равномерно расположенных по окружности на рас2 стоянии -р- относительно друг друга, в пазы секторов статора уложена об(О мотка, выводы которой являются выхо(Л дом датчика угла, многополюсньй модулятор, установленный с зазором концентрично внутри ротора, ротор выполнен в виде тонкостенного стакана из упругого ферромагнитного, предварительно намагниченного материала, зубцовые шаги i oi ротора и статора выполнены равными, каждый зубчатый сектор статора смещен по углу относительно соседнего зубчато го сектора на величину - , вьгооА Р со СП ды модулятора являются входами дат00 чика угла. ел
| Преобразователь угла поворота вала в код | 1973 |
|
SU503268A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Вайда Л.И | |||
| и др | |||
| Электронные узлы прецизионного преобразователя угол-код | |||
| - В кн | |||
| Элементы цифровых систем управления | |||
| Л.: Наука, 1971, с | |||
| Приспособление для подвешивания тележки при подъемках сошедших с рельс вагонов | 1920 |
|
SU216A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
