1
Изобретение относится к электриijecKHM машинам и может быть использовано в следящих системах с электрической редукцией, в двухотсчетных преобра-)вателях уг-ол-код.5
Известны устройства типа многополюсных вра1цаю14ихся трансформаторов, выходное напряжение которых периодетчно по отношению к углу поворота ротора 1 и 2. Недостатком
вестных устройств является невысокая точность.
Наиболее близким по технической сущности и достигаемому результату к изобретению является двухфазный .13 индукционный бесконтактный редуктосин 2.
. В этом индукционном редуктосине число периодов выходного сигнала равно числу зубцов статора. Обмотки 20 возбуждения и измерительные составляются из последовательно соединенных зубцошз1х катушек.
Недостатком известного редуктосина является то, что число периодов вы- 25 ходного сигнала, а следовательно, и его точность при данном диаметре ограничены. При высокоточном преобразовании угла в цисйу число периодов определяет 7-8 разрядов грубого 30
отсчета, а системой функционального электронного цифрового считывания эта доля периода раздробляется еще на число двоичныхразрядов максимум порядка десяти. Отсюда вытекают высокие требования к то 1нойти обработки. При диаметр статора должен &ать не менее 200 мм. Если бы, например, мы хотели получить 256периоfspia на окружности, то должны были бы взять гр аметр 400 км с резким увеличением габарита.
Цель изобретения - покушение точности при этом же диаметре путем уве.пичения коэффициента электрической редукции вдвое.
Это достигается тем, что в известном MHoronontocHOM двухфазном датчике угла, содержащем сягатор с числом зубцов 8т с катушками на зубцах и безобмоточный зубчатый ротор с числом зубцов (8+1) каждая фазная обмотка содед жит четьфе секции, состоящие каждая из ш - параллельно или последэвательно включенных эубцовых катушек, налютанных через 8 зубцовых шагов, причем соседние секции нги отакы со сдвигом на: два эубцовых шага и соединены в две группы из двух последовательно включенных звеньев.
каждое из которых содержит две параллельно включенные секции, имеющие между собой сдвиг на четыре зубцовых шага, к концам же группы подведены клеммы питания, а датчик снабжен трансформаторами, число которых равн числу звеньев, к концам звеньев подключены первичные обмотки трансформаторов, вторичные обмотки которых включены встречно, а фазные обмотки смещены между собой на один зубцовой шаг, где т- целое число,
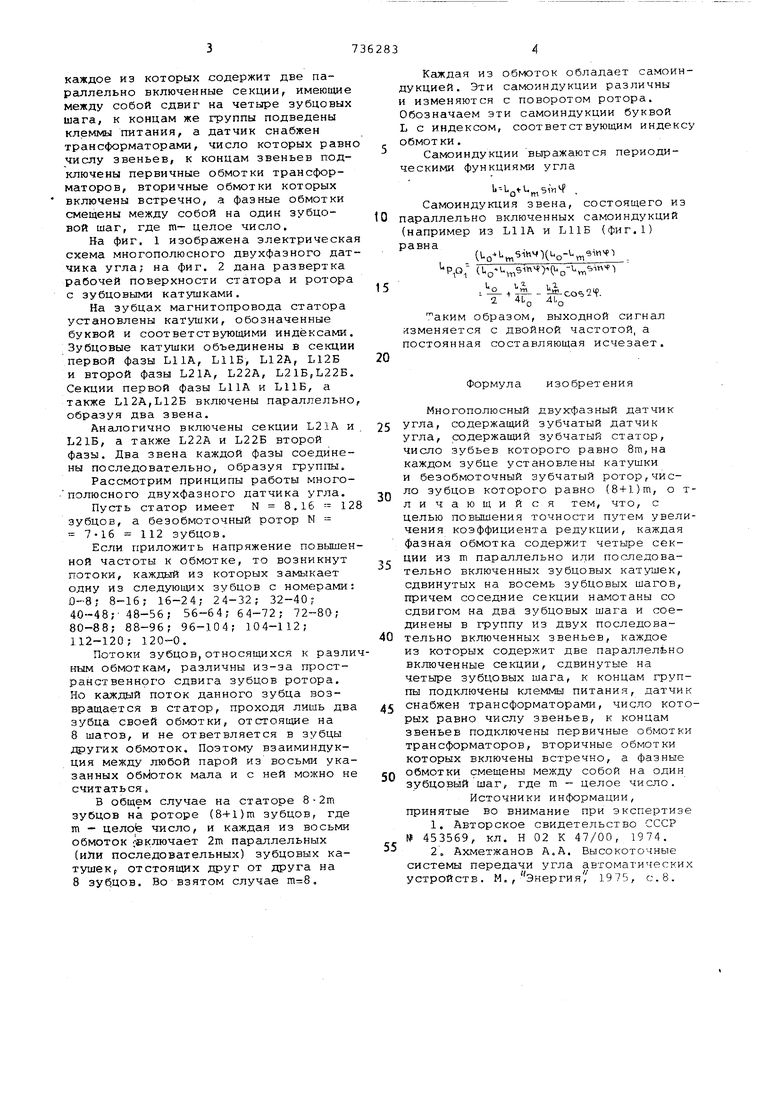
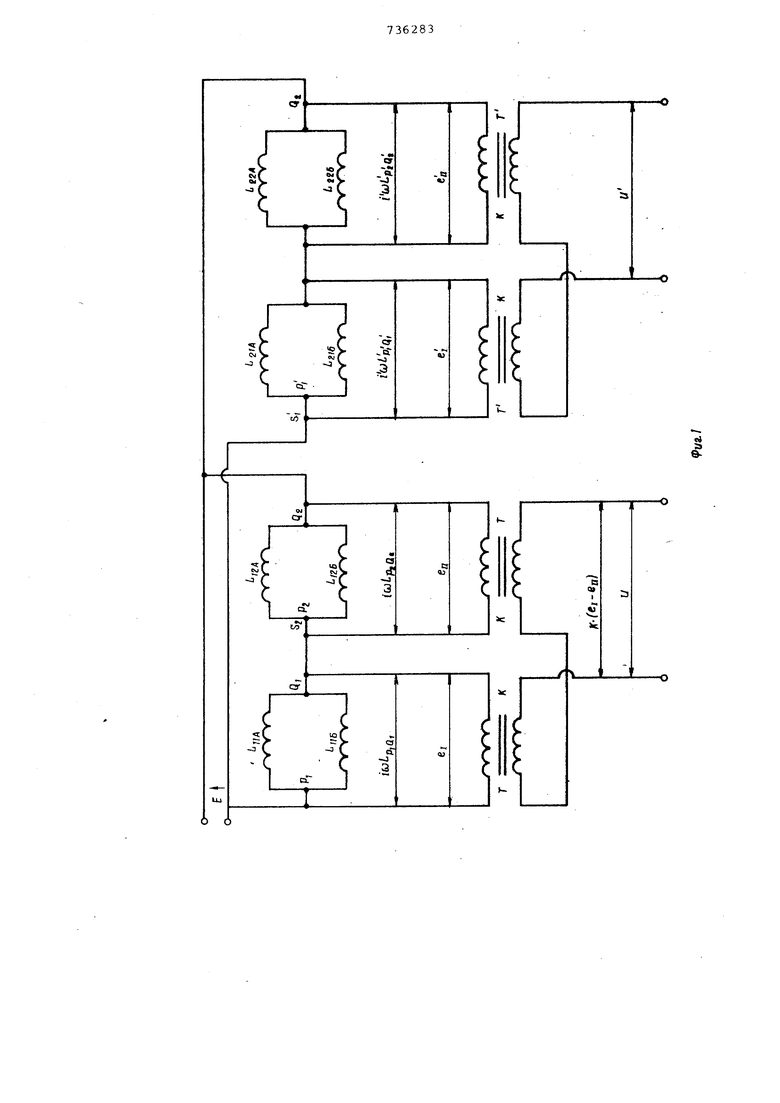
йа фиг, 1 изобрс1жена электрическа схема многополюсного двухфазного датчика угла; на фиг, 2 дана развертка рабочей поверхности статора и ротора с зубцовыми катушками,
На зубцах магнитопровода статора установлены катушки, обозначенные буквой и соответствующими индексами, Зубцовые катушки объединены в секции первой фазы L11A, Ы1Б, L12A, Ы2Б и второй фазы L21A, L22A, L21B,L22B. Секции первой фазы И1А и Ы1Б, а также Ы2А,Ы2Б включены параллельно образуя два звена.
Аналогично включены секции L,21A и L21B, а также L22A и L22B второй фазы. Два звена каждой фазы соединены последовательно, образуя группы.
Рассмотрим принципы работы многополюсного двухфазного датчика угла.
Пусть статор имеет N 8,16 12 зубцов, а безобмоточный ротор N 7-16 112 зубцов.
Если приложить напряжение повышенной частоты к обмотке, то возникнут потоки, каждаай из которых замыкает одну из следующих зубцов с номерами: 0-8; 8-16; 16-24; 24-32; 32-40 40-48;- 48-56; 56-64; 64-72; 72-80; 80-88; 88-96; 96-104; 104-112; 112-120; 120-0,
Потоки зубцов,относящихся к разлиным обмоткам, различны из-за щзостранот венного сдвига зубцов ротора. Но Кс1ЖД1лй поток данного зубца возвращается в статор, проходя лишь два зубца своей обг«ютки, отстоящие на 8 шагов, и не ответвляется в зубцы других обмоток. Поэтому взаиминдукция между любой парой из восьми указанных обмоток мала и с ней можно не считаться,
В общем случае на статоре 8 - 2т зубцов на роторе (8-+l)m зубцов, где m - цело число, и каждая из восьми обмоток включает 2т параллельных (иЛи последовательных) зубцовых катушекр отстоящих друг от друга на 8 зубцов. Во взятом случае ,
Кс1ждая из обмоток обладает самоиндукцией. Эти самоиндукции различны и изменяются с поворотом ротора. Обозначаем эти самоиндукции буквой L с индексом, соответствующим индекс обмотки.
Самоиндукции выражаются периодическими функциями угла
l..f ,
Самоиндукция звена, состоящего из параллельно включенных самоиндукций (например из L11A и Ы1Б (фиг,1)
равна
()(
P,Q; ()Нь„-и„ь.п
I,
- .
4Г о о
аким образом, выходной сигнал (изменяется с двойной частотой, а постоянная составляющая исчезает.
Формула изобретения
Многополюсный двухфазный датчик угла, содержащий зубчатый датчик угла, содержащий зубчатый статор, число зубьев которого равно Вт,на каждом зубце установлены катушки и безобмоточный зубчатый ротор,число зубцов которого равно (8+1)т, о тличающийся тем, что, с целью повышения точности путем увеличения коэффициента редукции, каждая фазная обмотка содержит четыре секции из m параллельно или последовательно включенных зубцовых катушек, сдвинутых на восемь зубцовых шагов, причем соседние секции намотаны со сдвигом на два зубцовых шага и соединены в группу из двух последовательно включенных звеньев, каждое из которых содержит две параллельно включенные секции, сдвинутые на четыре зубцовых шага, к концам группы подключены клеммы питания, датчик снабжен трансформаторами, число которых равно числу звеньев, к концам звеньев подключены первичные обмотки трансформаторов, вторичные обмотки которых включены встречно, а фазные обмотки смещены между собой на один зубцовый шаг, где m целое число.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 453569, кл, Н 02 К 47/00, 1974,
2,Ахметжанов А.А, Высокоточные системы передачи угла автоматических устройств. М, ,энергия 1975, с. 8.
.CI
«)
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухфазный двоичный датчик угла | 1978 |
|
SU758411A1 |
| Вращающийся трансформатор | 1977 |
|
SU736284A1 |
| Многополюсный двоичный двухфазный бесконтактный датчик | 1985 |
|
SU1377973A1 |
| Индукционный редуктосин | 1990 |
|
SU1830597A1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
| Индукционный редуктосин | 1990 |
|
SU1798865A1 |
| Индукционный редуктосин | 1985 |
|
SU1350772A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2007 |
|
RU2423272C2 |
| ПДТЕНТНО-ТШКНЕСКАЬИЬЛИОТЕНАРЕДУКТОСИН | 1971 |
|
SU304663A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
IS:
trt
СЗГ
««
