Изобретение относится к горному делу и может быть использовано для измере{{ия параметров шахтной крепи. Целью изобретения является повьше ние точности измерений и производительности обработки данных за счет осуществления, записи измеряемых пара метров в прямоугольных координатах при постоянном масштабе. На фиг. 1 и 2 представлена конструкция прибора; на фиг. 3 - схема поясняющая расчеты. Прибор для регистрации рабочих характеристик шахтной крепи содержит корпус 1, закрепленные на нем датчик 2 измеряе зго параметра с толкателем 3, барабанный лентопротяжный механизм 4, катушку 5 с запасом специальной бумаги, стойку 6 с криволинейньм пазом 7, рычаг 8 с возвратной пружиной 9. На одном конце пишущего .рычага 8 выполнен прямолинейный паз 10, обеспечивающий продольное смещение рычага относительно штыря 11, неподвижно закрепленного на корпусе прибора. На другом конце рычага 8 находится пишущее перо 12, осуществлякхцее запись измеряемых параметров на специальной бумаге, намотанной на барабан лентопротяжного механизма 4 В средней части рычага 8 закреплен ррлзж 13, движущийся в криволинейном направляющем пазу 7 стойки 6 С плоской поверхностью 14 рычага 8, проходящей через оси пишущего пера 12 и штыря 11 и перпендикулярной ос вращения барабана лентопротяжного механизма 4, взаимодействует своей клиновидной кромкой толкатель 3 дат чика 2 измеряемого параметра. Перемещение толкателя 3 датчика измеряемого параметра Уд пропорционально величине входного парамет ра (давления)(см. фиг. 3) у кР,( где к коэффшдиент пропорциональности, определяемый диамет ром плунжера и жесткостью пружины датчика, м/МПа Р - давление, МПа. С другой стороны, положение толкателя 3 характеризуется уравнениям вида
(2)
const;
(3) tg.
Хл где оС - угол наклона к горизонту линии, проходящей через оси пишущего пера 12, штыря 11, плоскую поверхность 14 рычага 8. Перемещение пера 12 на диаграммной бумаге описывается уравнениями х const t ос;(4) УС . Масштаб записи прибора таким образом составит li хс УА Xfttg, ХА т.е. вследствие того, что поверхность 14 рычага 8, с которой взаимодействует толкатель 3 датчика 2 входного параметра находится в плоскости, проходящей через оси штыря 11 и пишущего пера 12, перемещение пишущего пера оказьгоается пропорциональным входному воздействию и определяется величиной и соотношением плеч ОА и ОС. Выходной параметр УС, из соотношения (6), учитывая (1), составит . SlElSSr ХА где к Ktn - коэффициент пропорциональности. Таким образом, прибор обеспечивает запись регистрируемых параметров с постоянным масштабом во всем диапазоне изменения давления. .Масштаб записи можно изменять перемещением толкателя 3 относительно оси штыря 11. Постоянный масштаб записи времени обеспечивается часовым механизмом или Электромотором Уоррена, вращающим барабан с постоянной скоростью. Найдем уравнение траектории движения оси ролика 13 (точки В) рычага 8 (см. фиг. 3), один конец которого подвижно закреплен на неподвижном штыре 11 (точка 0) а другой - ось пиш пцего пера 12 совершает прямолинейное перемещение вдоль оси у. Положение точки В рычага описывается уравнениями
Возведя полученные выражения в квадрат и складывая, получим
( - е
У,
К
COSoi
Е
Таким образом, для обеспечения прямолинейности записи выходного параметра средняя линия криволинейного направляющего паза, в котором движется ролик 13 рычага 8, должна описываться уравнением (8),причем ролик должен находиться в направляющем пазу с минимальным зазором.
Прибор работает следующим образом
При изменении входного параметра толкатель 3 датчика 2 измеряемого параметра своей острой кромкой воздействует на рабочую поверхность 14 рычага 8. Последний, преодолевая усилие возвратной прзжины 9, поворачивается относительно неподвижного горизонтального штыря 11 и смещается по прямолинейному пазу 10, что вызывется движением ролика 13 в криволинейром направлякмцем пазу 7 стойки 6,
11797204
находящегося в нем с,минимальным зазором. При этом за счет выполнения направляющего паза 7с кривизной, (8) средня} линия которой описывается , уравнением вида
(-Х
ьс)
+ X
COSo
пишущее перо 12, закрепленное на другом конце рычага 8, обеспечивает регистрацию измеряемых параметров у в прямоугольных координатах с постоянным масштабом К.
Вращение лентопротяжного механизма 4 с постоянной скоростью обеспечивает регистрацию измеряемого параметра на бумагу, сматывающуюся с зарядной катущки 5, с постоянным масштабом во времени. Возвратная пружина 9 обеспечивает прижатие рычага к .толкателю 3 датчика 2 измеряемого параметра, устойчивую регистрацию измеряеьюго параметра во -всем диапазоне изменения и возврат в исходное положение при отсутствии входного воздействия. 2
фиг./ Ю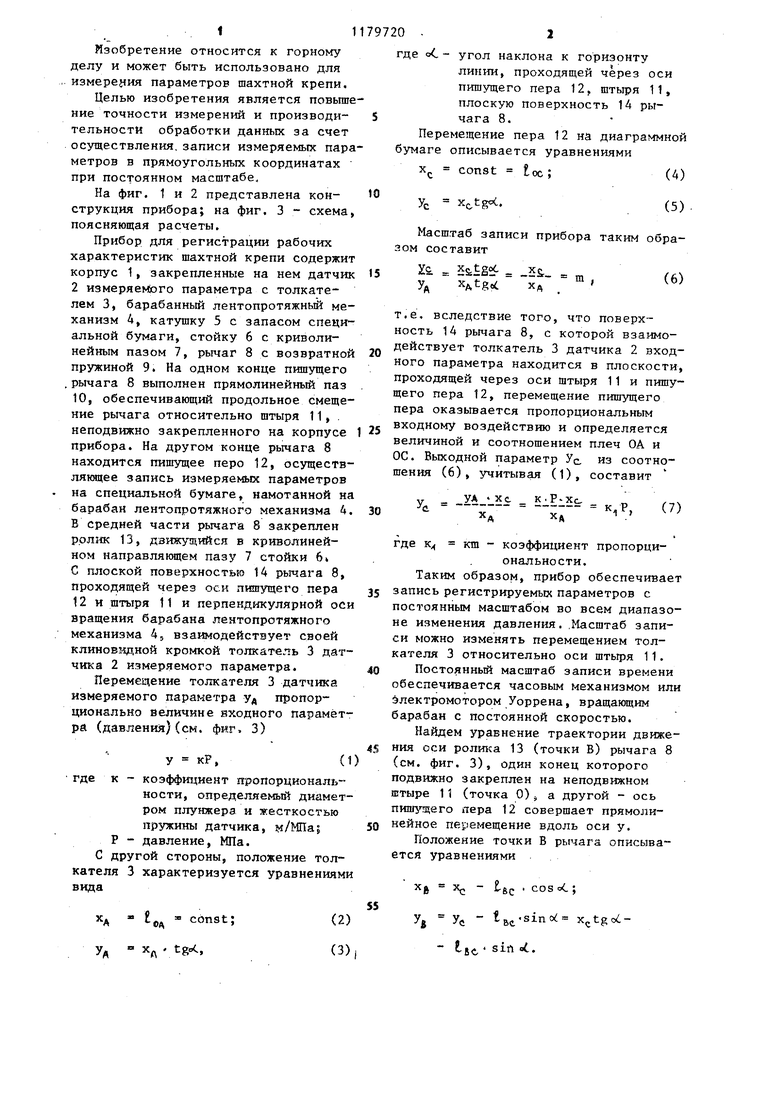

| название | год | авторы | номер документа |
|---|---|---|---|
| Механический регистратор волновых колебаний уровня водной поверхности | 1978 |
|
SU777428A1 |
| Устройство для регистрации траектории движения транспортного средства | 1981 |
|
SU960876A1 |
| Путеизмерительная тележка | 1956 |
|
SU107257A1 |
| ЛНСГТКА (Ю. А. Алексеев | 1972 |
|
SU342055A1 |
| Магнитоэлектрический регистрирующий измерительный прибор | 1961 |
|
SU143135A1 |
| ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ и РЕГИСТРАЦИИ МОМЕНТА ПРУЖИННОГО ДВИГАТЕЛЯ | 1973 |
|
SU368582A1 |
| РЕГИСТРИРУЮЩЕЕ УСТРОЙСТВО | 1966 |
|
SU214186A1 |
| Портативный наружный гистерограф | 1960 |
|
SU144946A1 |
| Устройство для регистрации траектории движения транспортного средства | 1985 |
|
SU1283822A1 |
| Прибор для записи углов наклона | 1957 |
|
SU115125A1 |

1, ПРИБОР ДЛЯ РЕГИСТРАЦИИ РАБОЧИХ .ХАРАКТЕРИСТИК ШАХТНОЙ КРЕПИ, включающий корпус со штырем и с установленным в нем самописцек с барабаном и пером, которое закреплено на конце подпружиненного рычага, в средней части которого выполнена плоская поверхность, а другой конец подвижно соединен со штырем корпуса, датчик измеряемого параметра с толкателем, установленным с возможностью взаимодействия с плоской поверхностью рычага, отличающийся тем, что, с целью повышения точности измерений и производительности обработки данных за счет осуществление записи измеряемых параметров в прямоугольных координатах.при постоянном масштабе, он снабжен стойкой с криволинейным пазом и роликом, а в рычаге самописца выполнен прямолинейный паз в месте подвижного соединения со штырем корпуса и с возможностью взаимодействия с ним, при этом стойка установлена на корпусе, ролик размещен на рычаге меяоду пером и плоской поверхностью с возможностью перемещения в пазу стойки оси пера самописца, прямолинейный паз и плоская поверхность рычага выполнены на одной линии, а средняя линия криволинейного паза стойки описывается формулой « ) : у X cosK 9 где Xg - наикратчайшее расстояние (по горизонтали) . от оси пера до оси штыря корпуса; оС - угол наклона продольной оси 1ШЧ8га к горизонтали; t расстояние от оси пера до ролика; координаты точек средней У QD линии криволинейного паза Ю . стойки. 2. Прибор по п. 1, о т л и ч аю ц и и с я тем, что ось штыря корпуса и середина криволинейного паза стойки расположены в плоскости, проходящей через середину рабочей части барабана сдмописца.
| ПРИБОР ДЛЯ РЕГИСТРАЦИИ РАБОЧИХ ХАРАКТЕРИСТИК СТОЕК ШАХТНЫХ ГИДРОКРЕПЕЙ | 0 |
|
SU343054A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Ардашев К.А | |||
| и др | |||
| Методы и приборы для исследования проявлений горного давления | |||
| М.: Недра, 1981, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
