S Изобретение относится к техничес кой диагностике динамических объектов, в частности, к системам, классифицирующим состояние динамическог объекта методом нелинейного преобра зования. Цель изобретения - исключение масштабирования исходных сигналов, повышение точности диагностирования и наде)хности. .. . ; На чертеже представлена структур ная схема системы, Система содержит блок сумг аторов 1, блок нелинейных элементов 2, блок квадраторов 3, блок интеграторов 4, многовходовой компаратор 5. На выходах блока сумматоров 1. образуются результаты вычитания эта .;;онов Z(t) из выходного сигнала оОъекта x(t); .11; x(t) - Z;(t). Затем эти разности проходят через соответствуюЕще нелинейные элементы блока нелинейных элементов 2. Преобразованные разности R -- Cf; (RO Бозводятся в квадрат.в блоке квадра торов 3 и интегрируются в блоке интеграторов 4, на выходах которого будут значения мер близости S, 1 4,(R,)clt. Из h значений мер близости с поковью многовходового компаратора 5 определяется наименьшая мера близос ти Sj и вьпсодной сигнал объекта x(t) относится к j -му классу сигналов, задаваемоку эталоном Z(t). Коэффициенты нелинейного преобра зования В„. в пре,цлагаемой системе легко нахо зятся по известным коэффи 32 циентам нелинейного преобразования где к - число коэффициентов. Эти коэффициенты должны быть такими, чтобы значение меры близости S; для данного эталона Z;(t) и совпадающей реализации выходного сигнала объекта было одинаковое в предлагаемой системе. Пусть для определенности вид нелинейного, преобразования следующий (наиболее удобньш при практической реализации): г- 1 1 (i)z:cKv4t), а in 2. Тогда для предлагаемой системы т . -г - т ..2B,,B,,iRji B,jR;ji, а для прототипа ,di.2A,.A,.p;Jt p;,jt, 005 где R; - x(t) - Z;(t)-, Р, х2 (t) - Z2.(c), В равенстве S- S неизвестны только В. и Bj, Аналогичные рассуйщения справедливы для га 2, а также для нелинейного преобразования произвольного вида, которое однозначно задается числовыми коэффициентами. Таким образом, в предлагаемой системе число нелинейных элементов уменьшетю вдвое, что повысило ее надежность и исключило погрешностьнеидентичн.ости и линейных элементов. Отпала необходимость в масштабировании исходных сигналов, так как нелинейному преобразованию подвергаются разности близких по величине сигналов.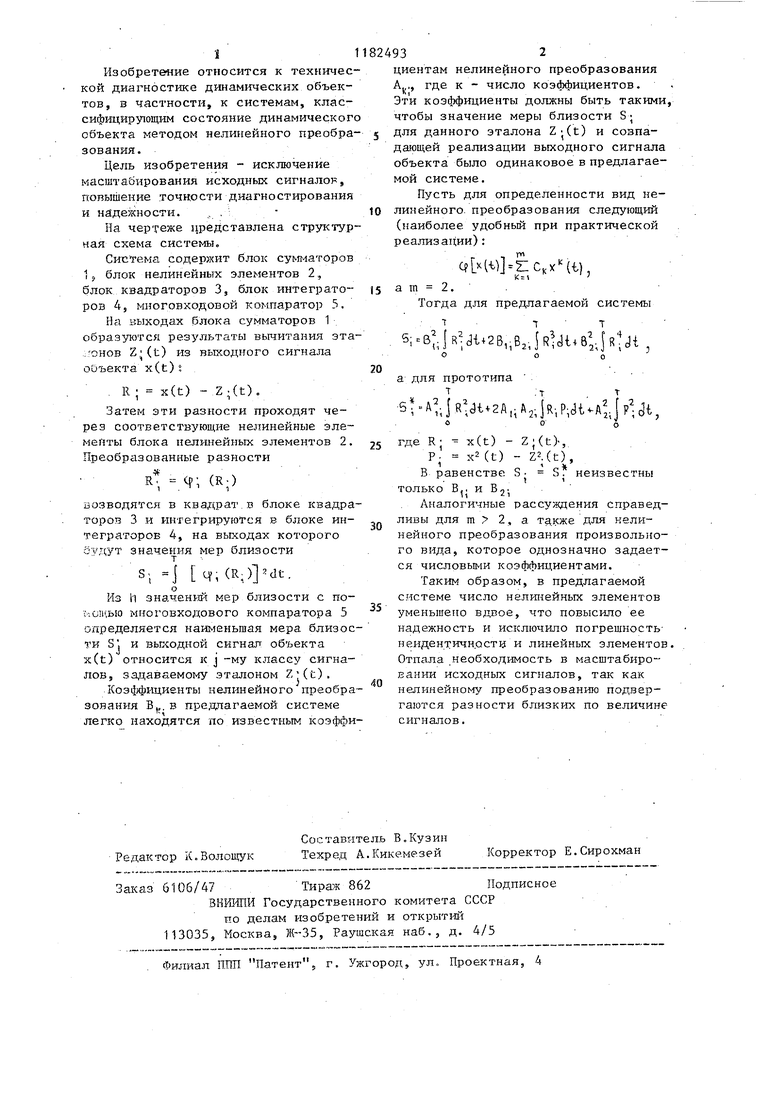
| название | год | авторы | номер документа |
|---|---|---|---|
| Система технической диагностики динамических объектов | 1985 |
|
SU1401441A1 |
| Система технической диагностики динамических объектов | 1986 |
|
SU1587468A1 |
| Устройство для диагностики | 1986 |
|
SU1432462A1 |
| Система технической диагностики объектов с самонастройкой параметров | 1986 |
|
SU1310780A1 |
| Многоканальное устройство функционального контроля | 1988 |
|
SU1596311A1 |
| Система функционального контроля динамического объекта | 1987 |
|
SU1481718A1 |
| Устройство для допускового контроля амплитудно-частотной характеристики четырехполюсников | 1989 |
|
SU1608591A1 |
| Система технической диагностики самонастраивающихся объектов | 1986 |
|
SU1495750A2 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ С ИСПОЛЬЗОВАНИЕМ МНОГОМЕРНЫХ МЕТРИЧЕСКИХ ПРОСТРАНСТВ | 2005 |
|
RU2288498C1 |
СИСТЕМА ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ, содержащая п источников эталонного сигнала, ц сумматоров, И квадраторов, П нелинейных элементов, и интеграторов и многовходовой компаратор, причем выход 1 -го квадратора через i -и интегратор соединен с соответствующим многовходового компаратора, выход которого является выходом системы, отличающаяся тем, что, с целью повышения точности диагностирования и надежности системы, первые входы всех сумматоров соединены с 9 мелщу собой и подключены к выходу диагностируемого объекта, а вторые (Л С входы сумматоров подключены к выходам соответствующих источников эталонного сигнала, выход j-го сумматора через 1-й нелинейный.элемент соединен с входом i-ro квадратора.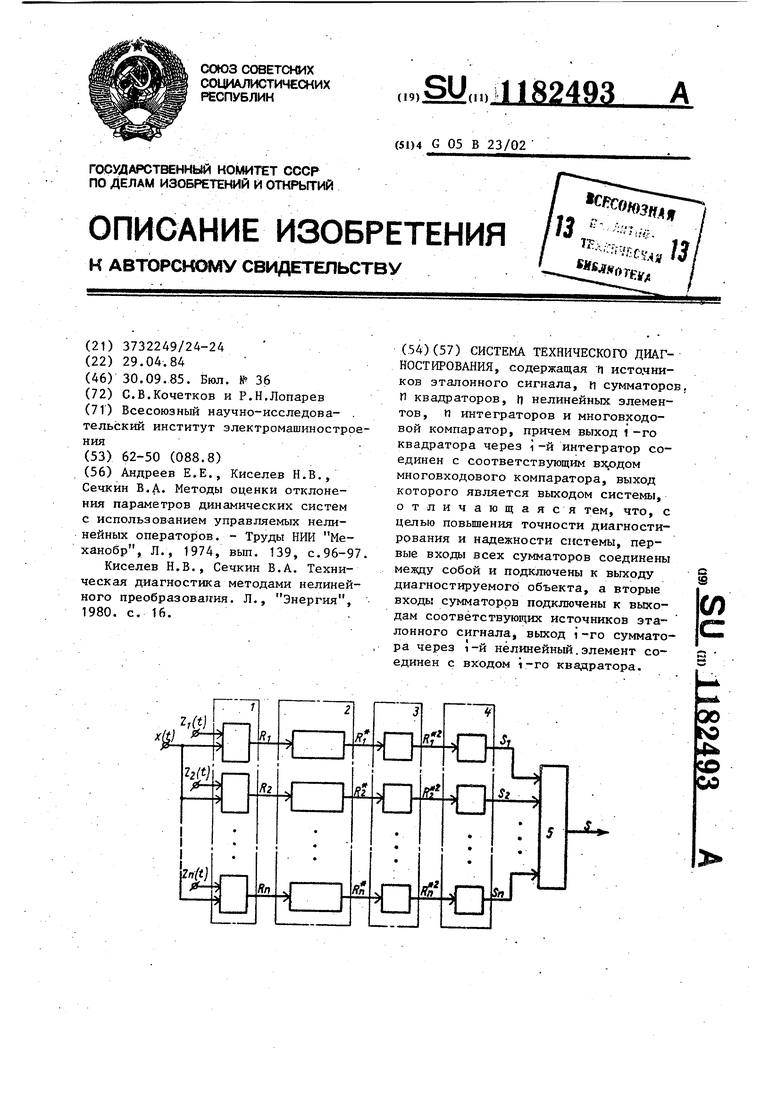
| Андреев Е.Е., Киселев Н.В., Сечкин В.А | |||
| Методы оценки отклонения параметров динамических систем с использованием управхиемых нелинейных операторов | |||
| - Труды НИИ Механобр, Л., 1974, вып | |||
| Способ подпочвенного орошения с применением труб | 1921 |
|
SU139A1 |
| Киселев Н.В., Сечкин В.А | |||
| Техническая диагностика методами нелинейного преобразоваггия | |||
| Л., Энергия, 1980 | |||
| с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
