Изобретение относится к технической диагностике и может быть использовано для технического диагностирования динамических объектов с исполь зованием метода нелинейного функционального преобразования.
Целью изобретения является повышение достоверности диагностики за счет более точного определения сое- тояния объекта.
Повышение достоверности диагностики заключается в том, что при достаточно малых значениях отклонений реального динамического объекта от эталонного, т.е. при отказах, вызванных уходом параметров за допуск на величину, не превышающую критические значения, ограничение сигнала не происходит, так как все элементы в каналах диагностирования находятся в линейном режиме, что обеспечивает их номинальный.режим.рабо.ты и отсутствие ложного результата на выходе системы.
Если же параметр ушел из допуска на величину, превьшающую критическое значение, или произошла авария, при которой реальный сигнал полностью не соответствует эталонному, то в этом случае пороги ограничения будут пре- вьшены, что приведет к перекрестному влиянию их отклонений друг на друга и к нарушению линейности в каналах диагностирования. Чтобы этого не было, разности между реальными сигналами и эталонными ограничиваются максимально допустимыми уровнями, защищающими элементы системы по на- сьщению. Кроме того, сформированный по результатам ограничения логически сигнал блокирует выходные информационые сигналы по параметрам, поскольку .они не будут соответствовать дейдт- вительному. изменению параметров объекта и однозначно определяет наличие в динамическом объекте аварийног режима, которьй можно интерпретировать как неразличимый отказ по параметру или авария.
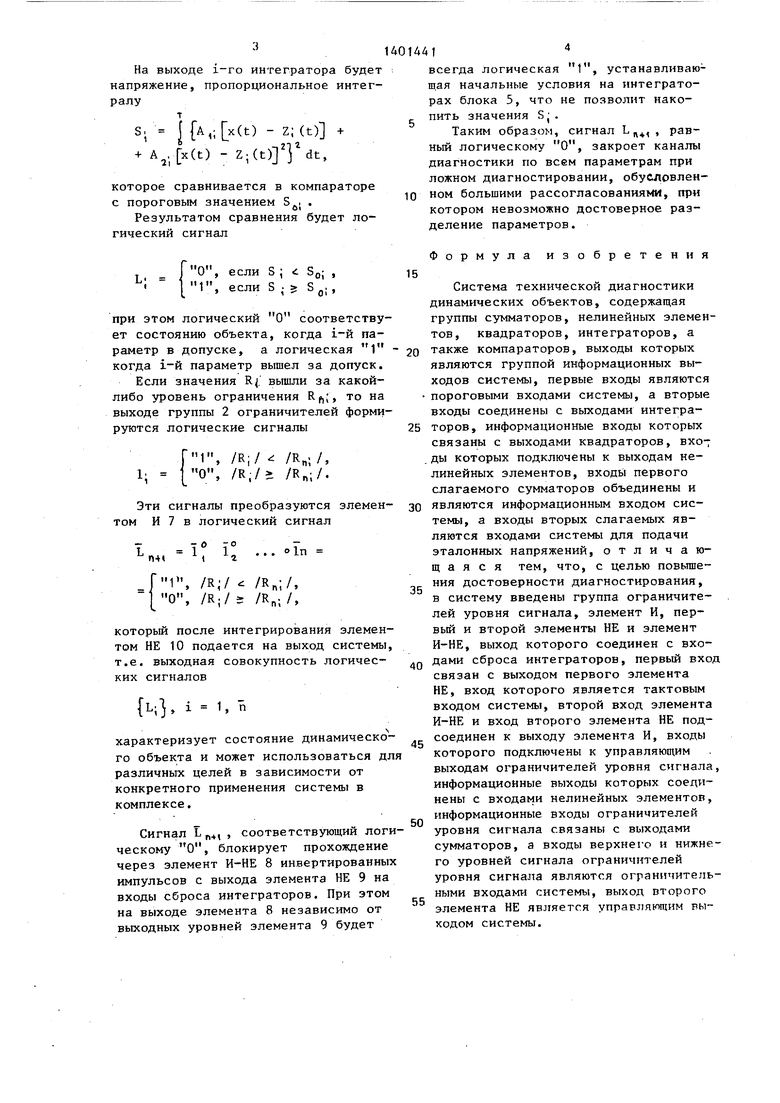
На фиг. 1 представлена функциональная схема системы: на фиг. 2 - схема ограничителя уровня сигнала.
Система содержит группы сумматоро 1, ограничителей 2 уровня сигнала, нелинейных блоков элементов 3, квад- раторов 4, интеграторов 5, компараторов 6, элементы И 7, ИЛИ-НЕ 8, НЕ 9 и 10.
Ограничитель 2 содержит двухпоро- говый компаратор 11, аналоговые ключ 12-14, элемент ИПИ-НЕ 15, резисторы 16-19 и операционный усилитель 20.
Система работает следующим образом.
Классификация реакции динамического объекта x(t) по классам работоспособности ,задаваемь м эталонами Z;(t), i 1, п, производится по величине меры близости S; (п - число контролируемых параметров).
Эту величину формируют на основании зависимости т
S; (t) - Z;(t)}dt,
о
где ср - оператор нелинейного преобразования в канале диагностирования, Т - время анализа (накопления) Нелинейное преобразование if, индивидуально определяется для каждого из параметров объекта.
Пусть для определенности оператор преобразования имеет вид
(t) А,; R(t) -f (t),
A ( - постоянные коэс R;(t) x(t) - Z-(t).
где A :( - постоянные коэффициенты.
Для диагностирования по i-му параметру необходимо разность R, являющуюся выходным сигналом сумматоров блока/ 1, преобразовать в соответствии с qi; , возвести в квадрат и проинтегрировать в течение Т.
При этом перед нелинейным преобразованием сигнал RJ проходит через ограничители уровня блока 2, аналоговые выходные сигналы которого
А RJ, /R;/ ,
l%«( /Ri/5 .
где - пороговое значение, равное
Rei или .
Сигналы Rj поступают на входы нелинейных элементов, выходные сигналы которого, равные
R;(t) А,; x(t) - Z;(t) + -ь A.x(t) - Z,(t),
возводятся в квадрат и интегрируются.
3
На выходе i-ro интегратора будет напряжение, пропорциональное интегралу
т
S; j A,(t) - Z; (t) +
A,x(t) - Z;(t),
которое сравнивается в компараторе с пороговым значением 5, .
Результатом сравнения будет логический сигнал
01Д41
всегда логическая 1, устанавливающая начальные условия на интеграторах блока 5, что не позволит накопить значения Sj.
Таким образом, сигнал L, , равный логическому О, закроет каналы диагностики по всем параметрам при ложном диагностировании, обусловлен- 10 ном большими рассогласованиями, при котором невозможно достоверное разделение параметров.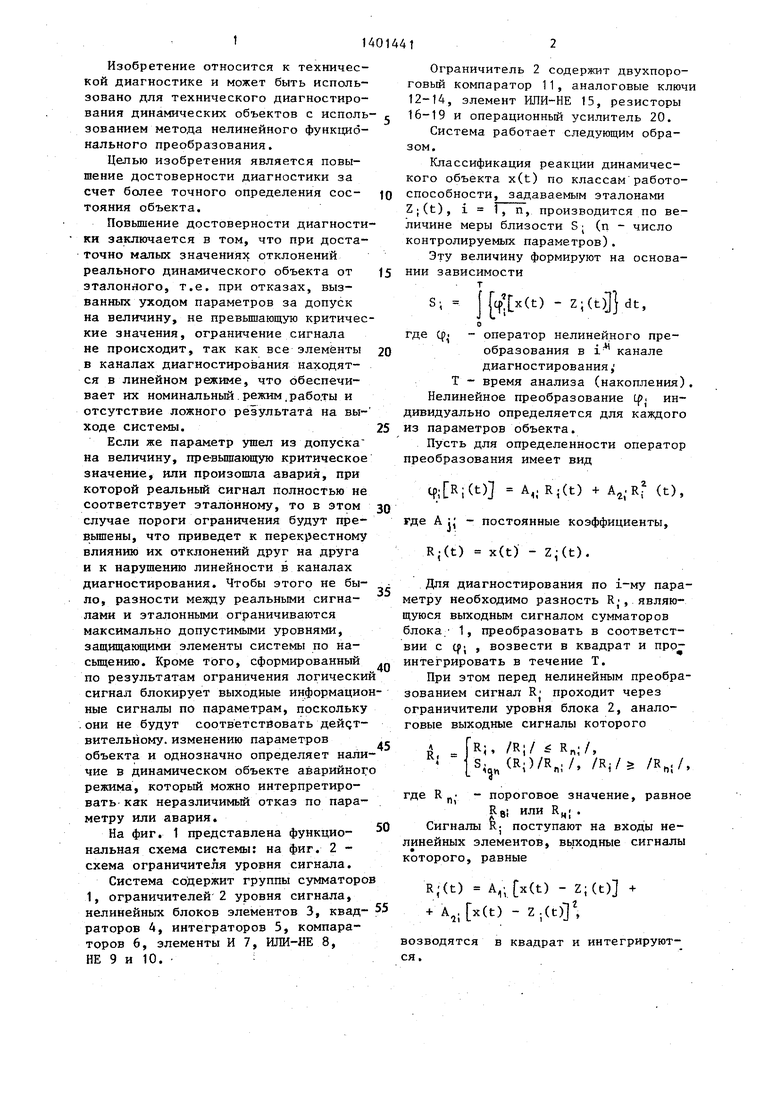
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики | 1986 |
|
SU1432462A1 |
| Многоканальное устройство функционального контроля | 1988 |
|
SU1596311A1 |
| Система технической диагностики динамических объектов | 1986 |
|
SU1587468A1 |
| Система функционального контроля динамического объекта | 1987 |
|
SU1481718A1 |
| Система технической диагностики объектов с самонастройкой параметров | 1986 |
|
SU1310780A1 |
| Система технической диагностики самонастраивающихся объектов | 1986 |
|
SU1495750A2 |
| Система технического диагностирования | 1984 |
|
SU1182493A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ С ИСПОЛЬЗОВАНИЕМ МНОГОМЕРНЫХ МЕТРИЧЕСКИХ ПРОСТРАНСТВ | 2005 |
|
RU2288498C1 |
| УСТРОЙСТВО ДЛЯ КЛАССИФИКАЦИИ МНОГОПАРАМЕТРИЧЕСКИХ ОБЪЕКТОВ | 1991 |
|
RU2049355C1 |

Изобретение относится к технической диагностике и может быть - прльзовано для диагностирования динамических объектов с использованием метода нелинейного функционального преобразования. Цель изобретения - повышение достоверности диагностирования. Система содержит группы сумматоров 1, ограничителей 2 уровня сигнала, нелинейных элементов 3, квадраторов 4,-интеграторов 5, компараторов 6, элементы И 7, П-НЕ 8, НЕ 9 и 10. Система обеспечивает линейность в каналах диагностирования и отсутствие перекрестного взаимовлияния каналов, за счет чего достигается более точное определение состояния объекта. 2 ил. (Л с 4 с 4 4 фиг.1
О, если S; So; ,
Г
если S S
о
при этом логический О соответствует состоянию объекта, когда i-й параметр в допуске, а логическая 1 когда i-й параметр вышел за допуск. Если значения R. вышли за какой- либо уровень ограничения Rf,;, то на выходе группы 2 ограничителей формируются логические сигналы
1;
1, /К;/ /Rn;/,
О, /R,/ .
Эти сигналы преобразуются элемен- зо том И 7 в логический сигнал
Т Т Т° 7 П4« 1( Ч In
, /R;/ /R,;/,
О, /Rj/i ,
который после интегрирования элементом НЕ 10 подается на выход системы, т.е. выходная совокупность логических сигналов
W.
i 1, п
характеризует состояние динамическо- го объекта и может использоваться для различных целей в зависимости от конкретного применения системы в комплексе.
Сигнал L +, , соответствующий логическому О, блокирует прохождение через элемент И-НЕ 8 инвертированных импульсов с выхода элемента НЕ 9 на входы сброса интеграторов. При этом на выходе элемента 8 независимо от выходных уровней элемента 9 будет
0
5
о
5
0
0
5
Формула изобретения
Система технической диагностики динамических объектов, содержащая группы сумматоров, нелинейных элементов, квадраторов, интеграторов, а также компараторов, выходы которых являются группой информационных выходов системы, первые входы являются пороговыми входами системы, а вторые входы соединены с выходами интеграторов, информационные входы которых связаны с выходами квадраторов, входы которых подключены к выходам нелинейных элементов, входы первого слагаемого сумматоров объединены и являются информационным входом системы, а входы вторых слагаемых являются входами системы для подачи эталонных напряжений, отличающаяся тем, что, с целью повьппе- ния достоверности диагностирования, в систему введены группа ограничителей уровня сигнала, элемент И, первый и второй элементы НЕ и элемент И-НЕ, выход которого соединен с входами сброса интеграторов, первый вход связан с выходом первого элемента НЕ, вход которого является тактовым входом системы, второй вход элемента И-НЕ и вход второго элемента НЕ подсоединен к выходу элемента И, входы которого подключены к управляющим выходам ограничителей уровня сигнала, информационные выходы которых соединены с входами нелинейных элементов, информационные входы ограничителей уровня сигнала связаны с выходами сумматоров, а входы верхнего и нижнего уровней сигнала ограничителей уровня сигнала являются ограничительными входами системы, выход второго элемента НЕ является управляющим ры ходом системы.
Фц.е.2
| Киселев Н.В., Сечкин В.А | |||
| Техническая диагностика мето дами нелинейного преобразования | |||
| Л.: Энергия, 1980, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Система технического диагностирования | 1984 |
|
SU1182493A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
