00 оо
4
2. Устройство по п. 1. отличающееся тем, что блок формирования сигналов коррекции режимов содер.жит делители, умножители, нелинейные преобразователн, элемент извлечения квадратного корня и выполненные на операционных усилителях элементы замедления, выходы которых являются выходами блока, одни из входов - его пятым и шестым входами, а другие входы подключены к выходам одного и другого умножителей, одни и другие входы которых соединены соответственно с выходом третьего умножителя и выходами одного и другого нелинейных преобразователей, входы которых являются т.рвым и третьим входами блока и объединены с одними входами четвертого умножителя и первого, второго и третьего делителей, другой вход последнего из которых соединен с выходом элемента извлечения квадратного корня, . подключенного входом к выходу третьего умножителя, связанного одним и другим входами с выходами четвертого и пятого умножителей, входы последнего из которых соединены соответственно с выходами третьего нелинейного преобразователя и шестого умножителя, один вход которого является вторым входом блока, а другой - через четвертый нелинейный преобразователь соединен с седьмым умножителем, входы которого объединены соответственно с выходом второго делителя, другой вход которого является четвертым входом блока, н через пятый нелинейный преобразователь с выходом третьего делите,ля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления судовым турбоагрегатом с винтом регулируемого шага | 1982 |
|
SU1071778A1 |
| Система управления судовым турбоагрегатом с винтом регулируемого шага | 1980 |
|
SU903573A1 |
| Система динамической стабилизации судна | 1985 |
|
SU1308040A1 |
| Устройство для контроля ресурса газогенератора турбореактивного двигателя | 1987 |
|
SU1508256A2 |
| Устройство для исследования характеристикгАзОТуРбиННыХ дВигАТЕлЕй | 1978 |
|
SU805327A1 |
| Устройство для контроля теплового состояния ротора турбины | 1984 |
|
SU1204750A1 |
| Устройство для управления работой судового двигателя и гребного винта регулируемого шага | 1983 |
|
SU1128227A1 |
| Система дистанционного автоматизированного управления режимами работы комплекса "главный" судовой турбоагрегат-винт регулируемого шага- навешенный генератор | 1977 |
|
SU779179A1 |
| Гидроакустическая система навигации акустической системы донных маяков | 1989 |
|
SU1838797A3 |
| Устройство для измерения величины и угла дисбаланса изделий | 1981 |
|
SU974172A1 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СУДОВЫМ ТУРБОАГРЕГАТОМ С ВИНТОМ РЕГУЛИРУЕМОГО ШАГА, содержащее связанный входами с датчиком частоты вращения турбины и с задатчиком режима через один из нелинейных преобразователей регулятор частоты вращения турбины, блок управления шагом винта, связанный одним входом с задатчиком режимов через другой нелинейный преобразователь, а другим - с выходом блока коррекции шага, один из входов которого соединен с датчиком частоты вращения турбины, отличающееся тем, что, с целью повыщения экономичности турбоагрегата, оно снабжено блоком формирования сигналов коррекции режимов, подключенными к одному и другому его выходам одними входами двумя сумматорами, датчиками крутящего момента гребного вала, щага винта и скорости судна, подключенными соответственно к первому, второму и третьему входам блока формирования сигналов коррекции режима, четвертый, пятый и шестой входы которого подключены соответственно к датчику частоты вращения турбины и выi ходам одного и другого нелинейных преобразователей, соединенных с другими входасл ми сумматоров.
1
Изобретение относится к средствам автоматизации судовых паровых турбин, приводящих во вращение винт регулируемого шага.
Цель изобретения - повышение экономичности турбоагрегата с винтом регулируемого шага за счет автоматической коррекции программы «Частота вращения - шаг при изменении условий плавания.На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - функциональная схема блока формирования сигналов коррекции режимов.
Устройство (фиг. 1) содержит задатчик 1 режима, связанный через нелинейные преобразователи 2 и 3 с одними входами сумматоров 4 и 5, другие входы которых подключены к одному и другому выходам блока 6 формирования сигналов коррекции режимов, первый и второй входы которого соединены с датчиками 7 и 8 крутящего момента гребного вала и шага винта соответственно. Третий и четвертый входы блока 6 соединены с датчиками 9 и 10 частоты вращения турбины и скорости судна соответственно, а пятый и шестой входы блока 6 подключены к выходам преобразователей 2 и 3.
Выход сумматора 4 подключен к одним входам регулятора 11 частоты, вращения турбины и блока 12 коррекции щага винта регулируемого шага (без позиции) с механизмом 13 изменения шага, подключенным к выходу блока 14 управления шг1гом, один и другой входы которого соединены с выходами блока 12 и сумматора 5.
На выходе регулятора 11 подключен маневровый клапан 15..
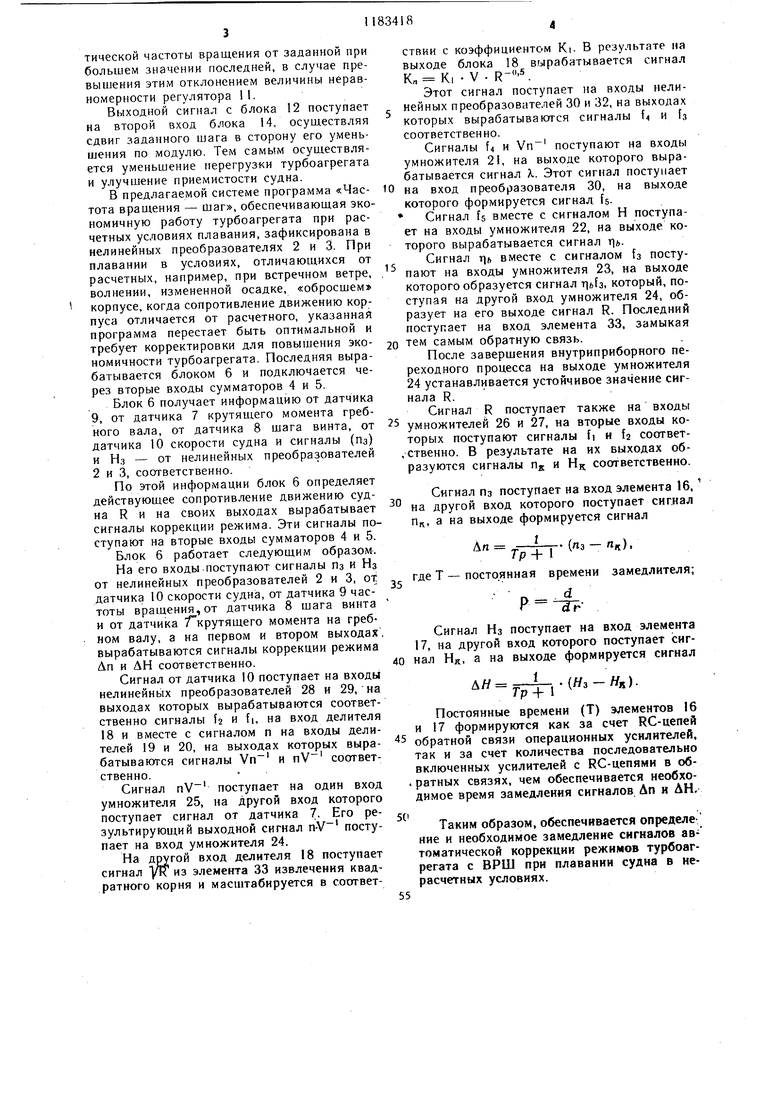
Блок 6 (фиг. 2) содержит элементы 16 и 17 замедления, выполненные на операционных усилителях, делители 18-20, умножитеjliH 21-27, нелинейные преобразователи 28- Й2 и элемент 33 извлечения квадратного корня.
Устройство работает следующим образом.
Для изменения хода судна оператор перемещает рукоятку управления ходом, воздействующую на задатчик 1 режима, сигнал которого передается нелинейным преобразователям 2 и 3.
Преобразователь 2 формирует сигнал задания частоты вращения турбоагрегата (пз) в зависимости от заданного хода судна. Этот сигнал через первый сумматор 4 поступает на настроечный вход регулятора 11 частоты вращения, который, получая сигнал обратной связи от датчика 9 и воздействуя на маневровый клапан 15, поддерживает заданную частоту вращения турбоагрегата и связанного с ним винта.
Второй преобразователь 3 формирует сигнал задания шага винта (Нз) в зависимости от заданного хода судна. Этот сигнал через второй сумматор 5 поступает на вход блока 14 управления шагом, который, воздействуя на механизм 13 изменения шага, разворачивает лопасти винта в положение заданного щага.
Таким образом, осуществляется программная связь «Частота вращения - шаг для различных скоростей хода судна при расчетных условиях плавания.
При проведении маневров возможна перегрузка турбоагрегата по моменту сопротивления, вызванный ею «провал частоты вращения и ухудшение приемистости судна. Для уменьшения этих явлений служит блок 12, на выходе которого вырабатывается сигнал, пропорциональный отклонению фактическои частоты вращения от заданной при большем значении последней, в случае превышения этим отклонением величины неравномерности регулятора 11.
Выходной сигнал с блока 12 поступает на второй вход блока 14, осуществляя сдвиг заданного шага в сторону его уменьшения по модулю. Тем самым осуществляется уменьшение перегрузки турбоагрегата и улучшение приемистости судна.
В предлагаемой системе программа «Частота вращения - шаг, обеспечивающая экономичную работу турбоагрегата при расчетных условиях плавания, зафиксирована в нелинейных преобразователях 2 и 3. При плавании в условиях, отличающихся от расчетных, например, при встречном ветр«, волнении, измененной осадке, «обросшем корпусе, когда сопротивление движению корпуса отличается от расчетного, указанная программа перестает быть оптимальной и требует корректировки для повышения экономичности турбоагрегата. Последняя вырабатывается блоком 6 и подключается через вторые входы сумматоров 4 и 5.
Блок 6 получает информацию от датчика 9, от датчика 7 крутящего момента гребного вала, от датчика 8 шага винта, от датчика 10 скорости судна и сигналы (пз) и Н.З - от нелинейных преобразователей 2 и 3, соответственно.
По этой информации блок 6 определяет действующее сопротивление движению судна R и на своих выходах вырабатывает сигналы коррекции режима. Эти сигналы поступают на вторые входы сумматоров 4 и 5.
Блок б работает следующим образом.
На его входы поступают сигналы Пз и Нз от нелинейных преобразователей 2 и 3, от датчика 10 скорости судна, от датчика 9 частоты вращения, от датчика 8 шага винта и от датчика / крутящего момента на греб: ном валу, а на первом и втором выходах, вырабатываются сигналы коррекции режима An и АН соответственно.
Сигнал от датчика 10 поступает на входы нелинейнь1Х преобразователей 28 и 29,на выходах которых вырабатываются соответственно сигналы 2 и f|, на вход делителя 18 и вместе с сигналом п на входы делителей 19 и 20, на выходах которых вырабатываются сигналы и соответственно.
Сигнал поступает на один вход умножителя 25, на другой вход которого поступает сигнал от датчика 7. Его результирующий выходной сигнал поступает на вход умножителя 24.
На другой вход делителя 18 поступает сигнал УК из элемента 33 извлечения квадратного корня и масштабируется в соответствии с коэффициентом Ki. В результате на выходе блока 18 вырабатывается сигнал
к„ К| V.
Этот сигнал поступает на входы нелинейных преобразователей 30 и 32, на выходах которых вырабатываются сигналы f4 и fa соответственно.
Сигналы f4 и поступают на входы умножителя 21, на выходе которого вырабатывается сигнал X. Этот сигнал поступает на вход преобразователя 30, на выходе
которого формируется сигнал fs. Сигнал fs вместе с сигналом Н поступает на входы умножителя 22, на выходе которого вырабатывается сигнал .
Сигнал ць вместе с сигналом 1з поступают на входы умножителя 23, на выходе которого образуется сигнал , который, поступая на другой вход умножителя 24, образует на его выходе сигнал R. Последний поступает на вход элемента 33, замыкая тем самым обратную связь.
После завершения внутриприборного переходного процесса на выходе умножителя 24 устанавливается устойчивое значение сигнала R.
Сигнал R поступает также на входы умножителей 26 и 27, на вторые входы которых поступают сигналы fi и f2 соответственно. В результате на их выходах образуются сигналы п и HR соответственно.
Сигнал Пз поступает на вход элемента 16, на другой вход которого поступает сигнал Пк, а на выходе формируется сигнал
I
(Пз - Пц),
Ап
ТР+ 1
где Т - постоянная времени замедлителя;
Р -7-гЛ
Сигнал Нз поступает на вход элемента
17, на другой вход которого поступает сигнал HK, а на выходе формируется сигнал
I
{Яз-Я«).
АЯ
ТР+ 1
Постоянные времени (Т) элементов 16 и 17 формируются как за счет RC-цепей обратной связи операционных усилителей, так и за счет количества последовательно включенных усилителей с RC-цепями в об. ратных связях, чем обеспечивается необходимое время замедления сигналов Дп и ЛН,
5(1
Таким образом, обеспечивается определекие и необходимое замедление сигналов автоматической коррекции режимов турбоагрегата с ВРШ при плавании судна в нерасчетных условиях.
| Система управления судовым турбоагрегатом с винтом регулируемого шага | 1982 |
|
SU1071778A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
