Изобретение относится к судовым паровьзм турбинам предназначенным для привода винтов регулируемого шага, и может быть использовано при их автоматизации
Наиболее близким к изобретению по технической сущности и достигаемому результату является система управления судовьом турбоагрегатом с винтом регулируемого шага, содержащая задатчик режима,,подключенный через первый нелинейный элемент к входу регулятора частоты вращения, связанного с маневровым клапаном, блок управления шагом винта/ связанный с механизмом его изменения и подключенный к выходу корректора . шага, и датчик частоты вращения, подключенный к входам регулятора частоты вращения и корректора шага СП.
Недостатком известной системы слдует считать пониженную экономичнос турбоагрегата из-за трудностей реализации оптимальной зависимости между шагом винта и частотой его вращения, которая обеспечивала бы минимальный расход пара при данной скорости судна.
Цель изобретения - повышение экономичности турбоагрегата,
Для достижения поставленной цели система управления судовым турбоагрегатом с винтомрегулируемого шага содержащая задатчик режима, подключенный через первый нелинейный элемент к входу регулятора частоты вращения, связанного с маневровым клапаном, блок управления шагом винта, связанный с механизмом его изменения и подключенный к выходу корректора шага, и датчик частоты вращения,,подключенный к входам регулятора частоты вращения и корректора шага, имеет второй нелинейный элемент и корректор режима, подключенный к одному из входов этого нелинейного элемента, второй вход которого соединен с задатчиком режима, выход - с входом блока управления шагом, причем вход корректора шага дополнительно соединен с выходом первбго нелинейного элемента.
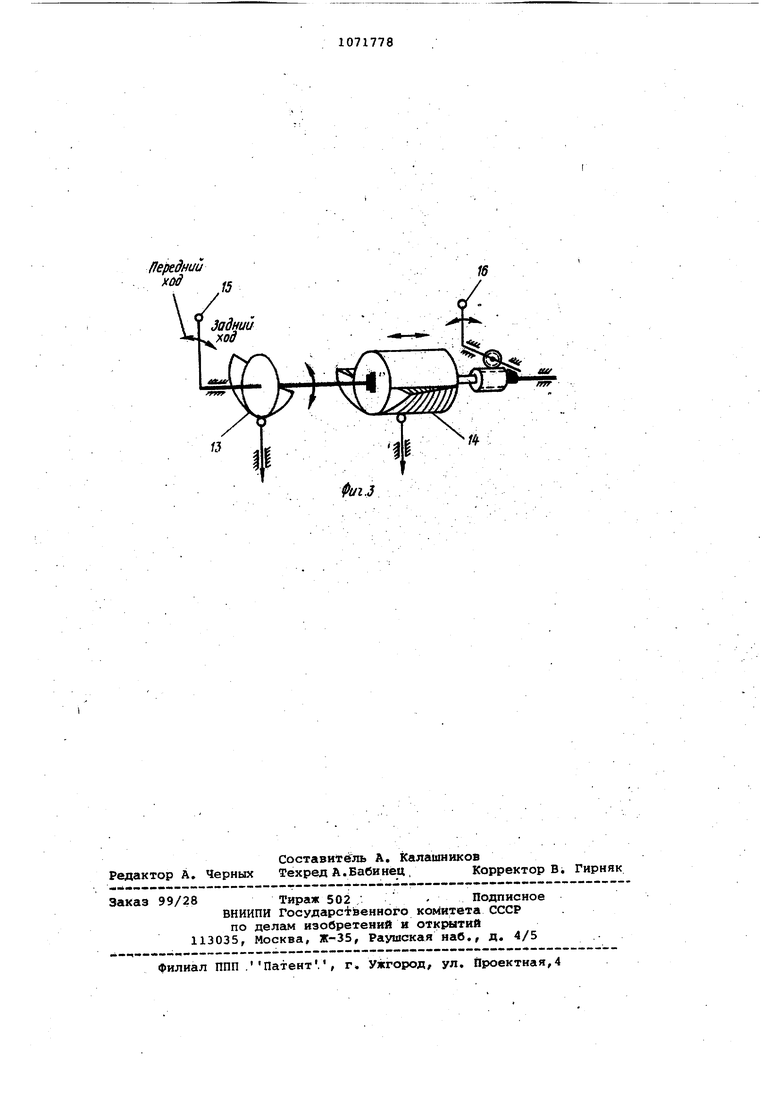
На фиг, 1 показана схема предлагаемой системы; на фиг, 2 - диаграмма, отражающая связь между частотой вращения и режимом работы турбоагрегата; на фиг. 3 - nptiMQp выполнения нелинейных элементов в .виде механических устройств.
В систему (фиг. 1) входят задатчик 1 режима, первый 2 и второй 3 нелинейные элементы, регулятор 4 частоты вращен-ия, маневровый клапан .5, главный судовой турбоагрегат 6, датчик 7 частоты вращения, механизм 8 изменения чпага, винт 9 регулируемого шага, блок 10 управления шагом, корректор 11 шага, корректор 12 режима.
Определить программную-связь между частотой вращения и шагом винта при разных скоростях судна можно по диаграмме Кфиг. 2) где обозначены: п - частота вращения винта, С - расход пара, V - скорость судна, И - ша винта. Такую диаграмму можно построить для любого судна, зная характеристики корпуса судна, винта и турбоагрегата.
На диаграмме выделяются точки минимального расхода пара для каждой расчетной скорости судна, и через эти точки проводится линия А программной связи частоты вращения и шага винта.
Получаемая при указанной программной связи экономия в расходе пара может достигать 10% от его величины при постоянной частоте вращения.
При различных внешних условиях плавания такая программа может меняться, т.е. требует корректировки. Эта корректировка может быть заранее рассчитана для определенных внешних условий плавания.
I Указанная программная связь частоты и шага винта в предлагаемой системе обеспечивается нелинейными элементами. Перьый нелинейный элемент реализует функцию
(siCjnXVM,
где X - сигнг1л задатчика режима;
- сигнал задания частоты вра. щения турбоагрегата. Для переднего хода судна х О, а для заднего хода х : О, в положении
Стоп
О,
ftsiqnxi a, при О,
f (Siqn4 b. при X с О, где - постоянные. Второй нелинейный элемент реализует функцию
-t-ч) (х) (1 + с),;
где t - сигнал задания шага винта
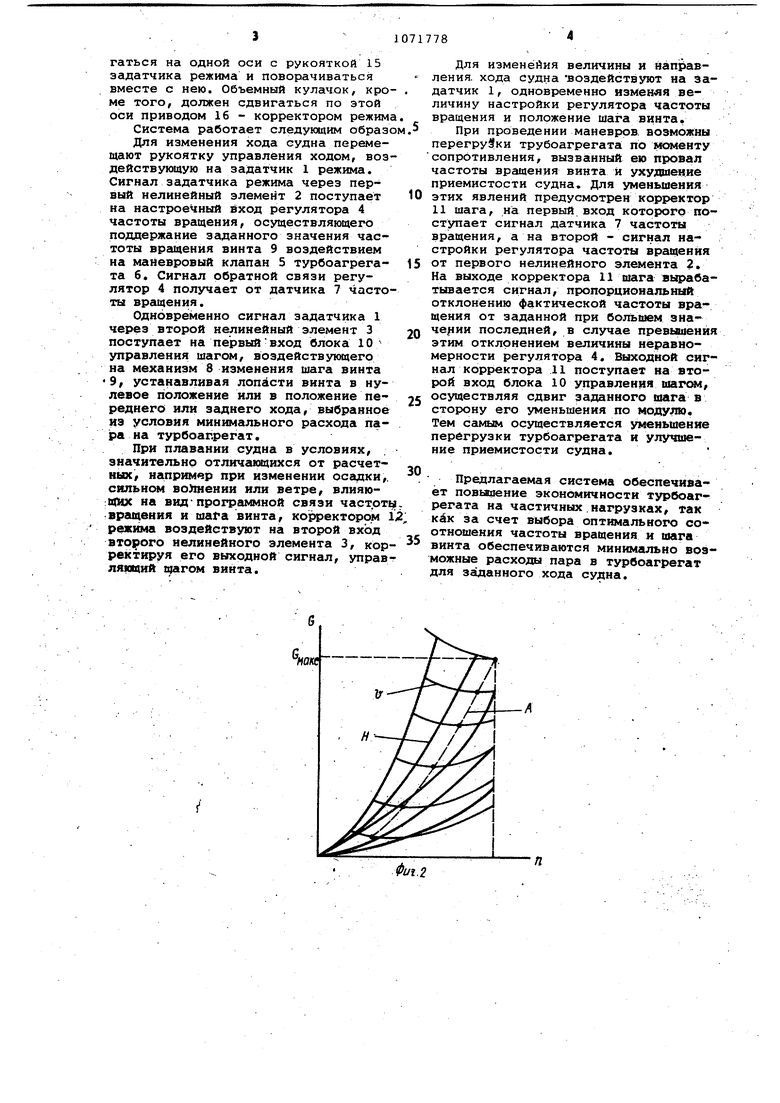
. g - сигнал корректора режима; / fCCx) - программаОптимальной связи частоты вращения и шага винта для номинальных внешних условий. Нелинейные элементы могут быть выполнены в виде электрического ;эвена, состоящего иэ унифицированных функциональных устройств, реализующих указанные нелинейные зависимости, а корректор режима - в виде врацакхцегося трансфо ядатора. Возможно также механическое исполнение этих устройств (фиг. 3). В этом случае первый нелинейный элемент может быть выполнен в виде плоского кулачка 13, а второй - в виде объемного кулачка 14. Оба кулачка должны располагаться на одной оси с рукояткой 15 эадатчика режима и поворачиваться вместе с нею. Объемный кулачок, кро ме того, должен сдвигаться по этой оси приводом 16 - корректором режим Система работает следующим образ Для изменения хода судна перемещают рукоятку управления ходом, воз действ укицую на задатчик 1 режима. Сигнал задатчика режима через первый нелинейный элемент 2 поступает на настроечный вход регулятора 4 частоты вращения, осуществляющего поддержание заданного значения час тоты вращения винта 9 воздействием на маневровый клапан 5 турбоагрегата 6, Сигнал обратной связи регулятор 4 получает от датчика 7 часто ты вращения. Одновременно сигнал задатчика 1 через второй нелинейный элемент 3 поступает на первыйвход блока 10 управления шагом, воздействующего на механизм 8 изменения шага винта 9у устанавливая лопасти винта в нулевое положение или в положение переднего или заднего хода, выбранное из условия минимального расхода пара иа турбоагрегат. При плавании судна в условиях, значительно отличгиощихся от расчетных, например при изменении осадки, сильном во 1нении или ветре, влияю:В{НХ на вид-программной связи чартрт вргицения и шага винта, корректором режима воздействуют на второй вход второго нелинейного элемента 3, кор ректируя его выходной сигнал, управ лямций щагом винта. Для изменения величины и йап1 авления. хода судна воздействуют на задатчик 1, одновременно изменяя величину настройки регулятора частоты вращения и положение шага винта. При проведении маневров, возможны перегруЭки трубоагрегата по Моменту сопротивления, вызванный ею провал частоты вращения винта и ухудшен:ие приемистости судна. Для уменьшения этих явлений предусмотрен корректор 11 шага, на первый вход которого поступает сигнал датчика 7 частоты вращения, а на второй - сигнал настройки регулятора частоты вращения от первого нелинейного элемента 2. На выходе корректора 11 шага вьфабатывается сигнал, пропорциональный отклонению фактической частоты вращения от заданной при большем значерии последней, в случае превышения этим отклонением величины неравномерности регулятора 4. Выходной сигнал корректора 11 поступает на второй вход блока 10 управления шагсил, осутцествляя сдвиг заданного шага в сторону его уменьшения по модулю. Тем самым осуществляется уменьшение перегрузки турбоагрегата и улучшение приемистости судна. Предлагаемая система обеспечивает повышение экономичности турбоагрегата на частичных.нагрузках, так кик за счет выбора оптимального соотношения частоты вращения и шага винта обеспечиваются минимально возможные расходы пара в турбоагрегат для заданного хода судна.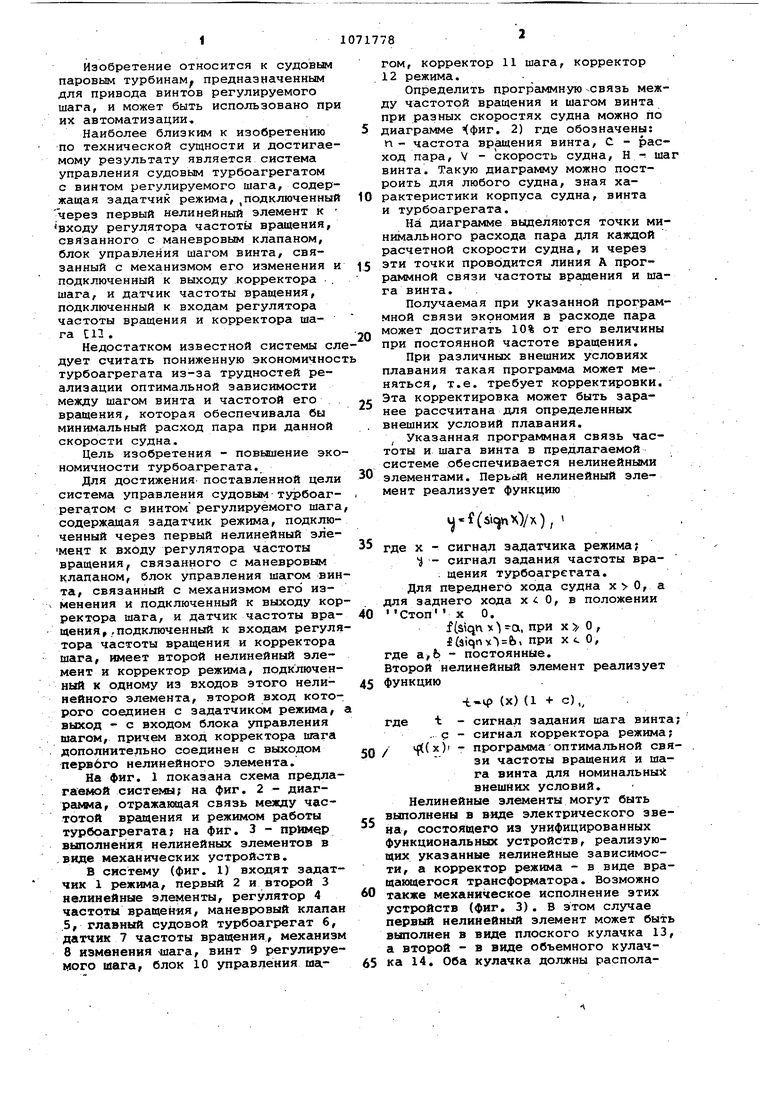
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления судовым турбоагрегатом с винтом регулируемого шага | 1984 |
|
SU1183418A1 |
| Система управления судовым турбоагрегатом с винтом регулируемого шага | 1980 |
|
SU903573A1 |
| Система дистанционного автоматизированного управления режимами работы комплекса "главный" судовой турбоагрегат-винт регулируемого шага- навешенный генератор | 1977 |
|
SU779179A1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО | 1973 |
|
SU383651A1 |
| Система дистанционного автоматического управления судовым комплексом турбоагрегат - винт регулируемого шага - валогенератор | 1990 |
|
SU1798252A1 |
| Система автоматического управления судовой турбиной | 1979 |
|
SU985329A1 |
| Устройство для управления работой судового двигателя и гребного винта регулируемого шага | 1983 |
|
SU1128227A1 |
| Устройство программного управления разогревом и охлаждением судового двигателя | 1983 |
|
SU1160084A1 |
| Система регулирования турбины | 1980 |
|
SU918452A1 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1975 |
|
SU575268A1 |
СИСТЕМА УПРАВЛЕНИЯ СУДС)ВЫМ ТИ РАГРЕГАТОМ С ВИНТОМ РЕГУЛИРУЕМОГОШАГА f содержаадая задатчик режима, :яо( через первый нелинейный {элемент к входу регулятора частоты :вращения, связанного с маневровым клгтансм,. блок управления шагом винта, связанный с механизмом его изменения и подключенный к выходу корректора шага, и датчик частоты вращения, подключенный к входгил регулятора частоты вращения и коррек ора шага, о т л и ч а ю щ а я с я тем, что, с целью повышения экономичности турбоагрегата, система имеет второй нелинейный элемент и корректор режима, подключённы й к одному из входов этого нелинейного элемента, второй вход которого соединен с задатчиком режима, .а выхсО с входом блока управления ttOttoM,, причем вход корректора шага дополнительно соединен с выходом первого нелинейного элемента. (Л f i 00
б
«ОЛЙ
Передний ход
f3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| / | |||
