(54) СИСТЕМА УПРАВЛЕНИЯ СУДОВЫМ ТУРБОАГРЕГАТОМ С ВИНТОМ РЕГУЛИРУЕМОГО ШАГА

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления судовым турбоагрегатом с винтом регулируемого шага | 1982 |
|
SU1071778A1 |
| Устройство для управления судовым турбоагрегатом с винтом регулируемого шага | 1984 |
|
SU1183418A1 |
| Система дистанционного автоматизированного управления режимами работы комплекса "главный" судовой турбоагрегат-винт регулируемого шага- навешенный генератор | 1977 |
|
SU779179A1 |
| Система дистанционного автоматического управления судовым комплексом турбоагрегат - винт регулируемого шага - валогенератор | 1990 |
|
SU1798252A1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО | 1973 |
|
SU383651A1 |
| Система автоматического управления судовой турбиной | 1979 |
|
SU985329A1 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1975 |
|
SU575268A1 |
| Устройство управления судовым комплексом турбоагрегат-винт регулируемого шага-валогенератор | 1988 |
|
SU1562234A1 |
| Система регулирования турбины | 1980 |
|
SU918452A1 |
| Система управления многовальной судовой силовой установкой | 1976 |
|
SU612849A1 |
1
Изобретение относится к средствам автоматизации судовых паровых турбин, приводящих во вращение винт регулируемого щага.
Наиболее близкой к предлагаемой по технической сущности и достигаемому ре- 5 зультату является система управления судовым турбоагрегатом с винтом регулируемого шага, содержащая задатчик шага винта, подключенный ко входу блока управления шагом, выход которого соединен с механизмом изменения шага, задатчик частоты вращения, подключенный ко входу блока управления частотой вращения, выход которого через регулятор частоты вращения соединен с маневровым клапаном, датчик частоты вращения, подключенный 15 к регулятору, корректор частоты вращения, вход которого соединен с механизмом изменения шага, и корректор шага, вход которого соединен с датчиком частоты вращения, а выход - со входом блока управ- о ления шагом. Управление трубоагрегатом осуществляется воздействием на задатчик шага винта, сигнал которого через соответствующий блок управления передается на механизм изменения шага. Заданная частота вращения поддерживается регулятором частоты вращения с датчиком и задатчиком путем воздействия на маневровый клапан. При изменении шага винта возникает отклонение частоты вращения, которое компенсируется коллектором частоты вращения. При полностью открытом маневровом клапане увеличение нагрузки может вызвать снижение частоты вращения, которое компенсируется корректором шагаСти.
Однако известная система характеризуется пониженной экономичностью, так как в ней не всегда реализуется оптимальная зависимость между шагом винта и частотой врашения.
Цель изобретения -.повышение экономичности.
Для достижения цели в систему введены нелинейное функциональное звено и масштабирующий элемент, включенные последовательно, и задатчик частоты вращения кинематически связан со входом нелинейного звена, выход корректора частоты вращения - со входом масщтабирующего элемента, а выход последнего - со вх{ iiiM блока управления частотой вращения.
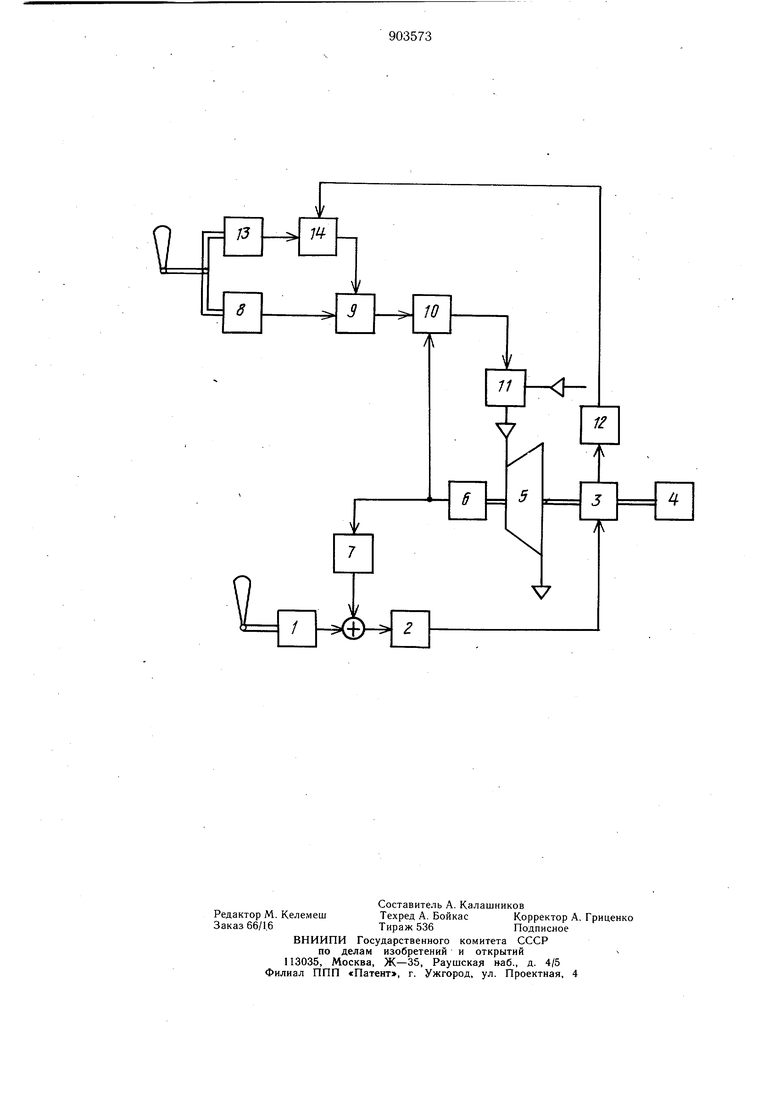
На чертеже показана схема предлагаемой системы.
Система включает задатчик 1 шага винта, блок 2 управления шагом, механизм 3 изменения шага, винт 4. регулируемого шага, главный судовой турбоагрегат 5, датчик 6 частоты враш.ения, корректор 7 шага винта, задатчик- 8 частоты враш,ения, блок 9 управления частотой вращения, регулятор 10 частоты враш.ения, маневровый клапан 11, корректор 12 частоты вращения по фактическому шагу винта, нелинейное функциональное звено 13 и масштабирующий э.:..гмент 14.
Принцип действия системы заключается в следующем.
Режим работы установки задается рукояткой машинного телеграфа, воздействующей на задатчик 1 шага винта. Сигнал зада1чика. 1 через блок 2 управления шагом передается на механизм 3 изменения шага, осуществляющий изменение положения, лопастей винта 4. Поддержание заданного значения частоты вращения винта осуществляется статическим регулятором 10, воздействующим на маневровый клапан 11 турбоагрегата 5. Компенсация статизма регулятора 10 при работе установки на частичных нагрузках осуществляется корректрром 12 частоты вращения по фактическому шагу винта. Сигнал корректора 12 поступает через масштабирующий элемент 14 на вход блока 9 управления частотой вращения, корректируя сигнал управления положением маневрового клапана 11. В результате управление шагом винта осуществляется при постоянном значении частоты вращения винта, заданной от рукоятки управления, воздействующей на задатчик 8 частоты вращения.
При необходимости изменить значение частоты вращения винта в зависимости от условий плавания судна воздействуют на задатчик 8 и далее на блок 9 управления, регулятор 10 и маневровый клапан 11 турбоагрегата 5. Одновременно изменяется величина сигнала корректора 12 посредством корректирующего воздействия нелинейного функционального звена 13 и масштабирующего элемента 14. В дальнейщем управляющее воздействие режимами работы комплекса турбоагрегата - винт регулируемого щага осуществляется от одной рукоятки управления, воздействующей на задатчик 1 шага в полном диапазоне располагаемых нагрузок, но при новом заданном постоянном значении частоты вращения гребного винта.
Посредством масщтабирующего элемента 14 осуществляется изменение наклона характеристики корректора 12, а функциональное звено 13 обеспечивает корректирующее воздействие для достижения точно
заданного значения частоты вращения винта. В качестве .масштабирующего элемента 14 могут быть использованы известные типы вращающихся трансформаторов, а нелинейное функциональное звено 13
может быть выполнено в виде кулачка изменяемого профиля, либо электрического звена, состоящего из унифицированных функциональных электронных устройств, реализующих типовые нелинейные зависимости.
При номинальном значении частоты вращения гребного винта в случае проведения глубоких маневров возможны перегрузки комплекса турбина - винт по моменту сопротивления. Для ограничения перегрузок предусмотрен корректор 7 шага винта, формирующий сигнал коррекции в блок 2 управления щагом. При снижении частоты вращения винта относительно номинального значения в случае значительных перегрузок корректирующий сигнал
корректора 7 уменьшает заданное от задатчика 1 значение шага винта.
Предлагаемая система обеспечивает повыщение экономичности установки на частичных нагрузках, так как за счет выбора рационального соотношения частоты вращения и шага винта обеспечиваются минимально возможные расходы пара в турбоагрегат для заданного режима работы установки.
Формула изобретения
Система управления судовым турбоагрегатом с винтом регулируемого шага, содержащая задатчик шага винта, подключенный ко входу блока управления шагом, выход которого соединен с механизмом изменения шага, задатчик частоты вращения, подключенный ко входу блока управления частотой вращения, выход которого через регулятор частоты вращения соединен с маневровым клапаном, датчик часр тоты вращения, подключенный к регулятору, корректор частоты вращения, вход которого соединен с механизмом изменения щага, и корректор щага, вход которого соединен с датчиком частоты врцщения, а выход - со входом блока управления шагом, отличающаяся тем, что, с целью повышения экономичности, в систему введены нелинейное функциональное звено и масштабирующий элемент, включенные последовательно, и задатчик частоты вращения кинематически связан со входом
нелинейного звена, выход корректора частоты вращения - со входом масщтабирующего элемента, а выход последнего - со входом блока управления частотой вращения. Источники информации,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 383651, кл. В 63 Н 21/22, 1970.
