1
(1 т (/luip отпгк;:ится к судор ой , Ш Г(1мзтикр, предилчначеио для управ- исгюлчительны и средствами судил н можот б1-1ть испол7 зонаио при экс плуптаций буровых, спасательных, на- учно нсследор1ательских и других судов, выполняющих работы в окрестности заданной точки морского дна.
Система ди гамической стабилизации на основе информа1Й- и с датчиков линейных перемещений судна относительно точки дна и датчика курса судна вырабатывает командные сигналы на исполнительные средства судна (главные движители, подруливающие устройства, движительно-рулевые колонки и т.п.) для создания управляющих сил и момента, противодействующих гидродинамическим и аэродинамическим воздействиям на судно ветро- волновых возмущений и морского течения .
-Удержание судна заданной точки морского дна в условиях воздействия на него интенсивных внешних возмущений требует больших затрат энергии. Это обстоятельство, а также длительность процессов динамической стабилизации судна в окрест- . ности зада1нюй точки (например, бурение подводной газонефтяной скважины длится 1,5-2 года) и ограниченность энергоресурса судна требует ьп1нимизиро зать расход энергии на управление судном.
Указанную минимизацию расхода энергии и процессе динамической стабилизации судна над заданной точкой морского дна целесообразно возложить на систему динамической стабилизацией судна путем ориентации судна против результирующего вектора внешних возмущений, поскольку при этом минимизируются гидроаэродинамические воздействия на него ветра; волнения и течения, а следовательно, и необхо- )Ie величины уг равляющих сил и моментов для парирования указанных возмущений.
Поскольку исполнительные органы судна предназначены для компенсации постоянных составляю1Щ1;х возмущающих сил и моментов от ветра, волн и те- , то источником непроизводительных затрат энергии является повышенная колебательность исполнительных средств судна, обусловленная наличием нерегулярных ветроволновьгх
JBOAO2
составляющих в сигналах управлении судном, поскольку при этом расходуется энергия на частые перекладки исполнительных органов, не способные 5 парировать нерегулярные силовые воздействия на судно морского волнения (обычно На порядок превышающие силовые возможности органов).
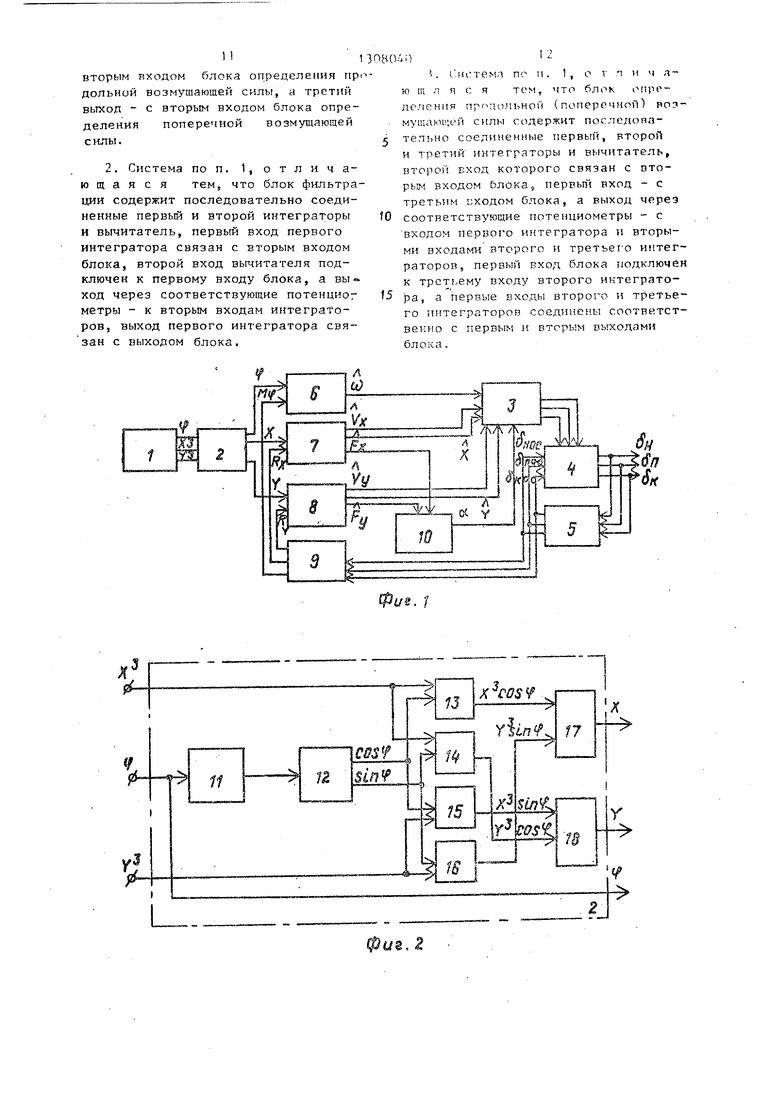
Целью изобретения является повы- JO шение точности стабилизации судна и уменьшение энергозатрат на управление исполнительными средствами посредством его оптимальной ориентации по курсу и уменьшения рыскания. J5 На фиг. 1 показана блок-схема системы динамической стабилизации судна; на фиг. 2-8 - функциональные узлы и блоки; на фиг, 9 - система координат судна.
20 Система динамической стабилизации содержит блок 1 датчиков рассогласо- . ваний по продольному и попер.ечному перемещениям и курсу судна, преобразователь 2 координат, вычислительный блок 3, блок 4 исполнительных органов и блок 5 датчиков обратных связей, блок 6 фильтрации курса, блок
7определения продольной возмущающей силы и блок 8 определения попе- речной возмущающей силы, блок 9 определения управ ляющих воздействий и блок 10 определения угла действия возмущения,
Блок 1 датчиков рассогласований
35 по продольному, поперечному перемещениям и курсу судна вырабатывает сигналы, характеризующие смещения судна в продольном и поперечном направлениях относительно задаКной
40 точки морского дна и отклонение.курса судна от его заданного значения.
8качестве датчиков смещений судна могут быть использованы гидроакустические датчики местоположения,
45 а в качестве датчика рассогласования по курсу - гирокомпас и встречно ему включенный задатчик курса судна.
Преобразователь 2 координат (фиг. 2) содержит следящий привод 11 курса, связанный входом с датчиком курса, и механически связанный с ним синусно-косинусный вра- щающийся трансформатор (СКВТ) 12, четыре множительных элемента 13-16, причем первые входы элементов 13, 15 связаны с косинусной обмоткой СКВТ, а первые входы элементов 14,
31
16 - с синусной обмоткой СКВТ, п то время .как вторые входы элементов 13, lA связаны с выходом датчика продольных смещений судна, а вторые входы элементйв 15, 16 - с выходом дат- чика поперечных смещек й, сумматор
17,входы которого связаны с выходами элементов 13, 16, вычитатель
18,входы которого соединены с выходами элементов 14, 15.
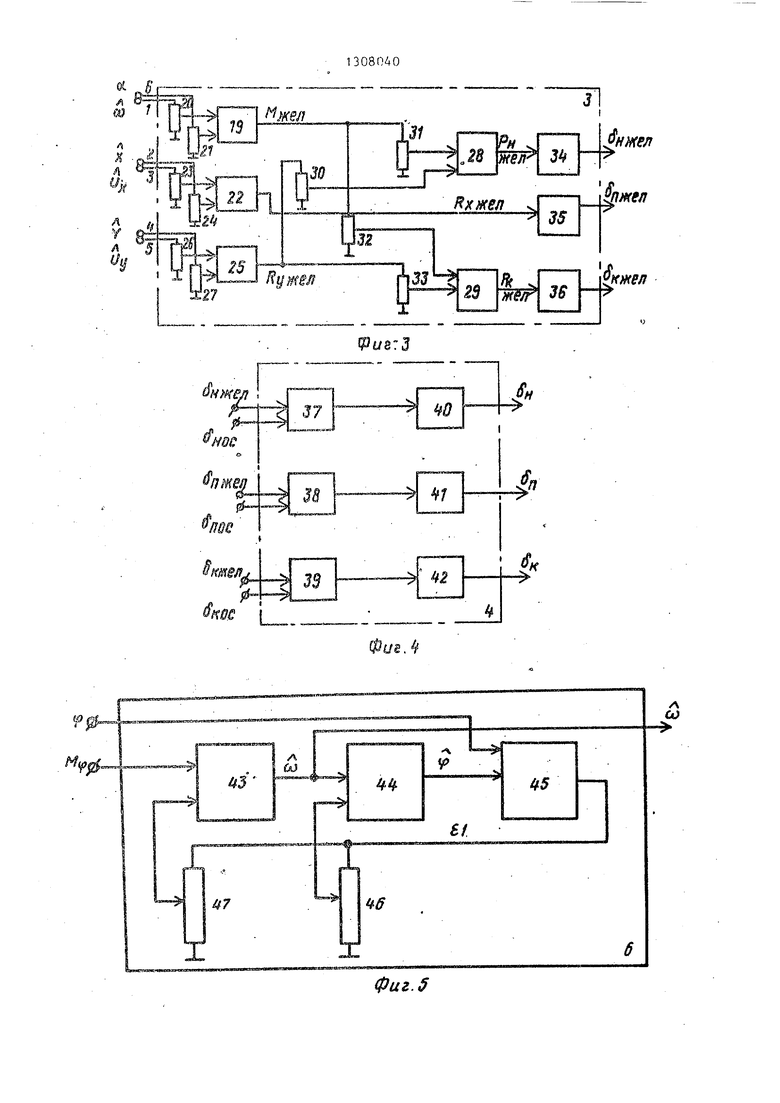
Вычислительный блок (фиг. 3) содержит сумматор 19, входы которого соединены через потенциометры 20, 21 с выходами блока 10 определения угла действия возмущений и блока 6 фильтрации курса, сумматор 22, вхо- ды которого через потенциометры 23, 24 связаны с выходами блока 7 определения продольной силы, сумматор 23, связанный входами через потен- циометры 26, 27 с . выходами блока 8 определения поперечной возмущающей силы, сумматоры 28, 29, связанные входами соответственно через потенциометры 30, 31 и 32, 33 с выходами сумматоров 19, 25, нелинейные функциональные преобразователи 34, 35, 36, входы которых соединены соответственно с выходами сумматоров -28, 22, 29.Исполнительные устройства (фиг.4) содержат три пары последовательно соединенных гидроусилителей 37 (38, 39) и гидромоторов 40 (41, 42).
Блок 5 датчиков обратных связей содержит три датчика (например, вращающиеся трансформаторы), механически связанных с выходами гидромоторов
40, 41, 42.
Блок 6 фильтрации курса (фиг. 5)
включает в себя последовательно соединенные интеграторы 43, 44 и вычитатель 45, второй вход которого связан с первьм выходом преобразователя 2 координат, а выход - через соответствующие потенциометры 46, 47 со вторыми входами интеграторов, в то время как первый вход интегратора 43 связан с первым выходом блока 9 оп- ределения управляющих воздействий.
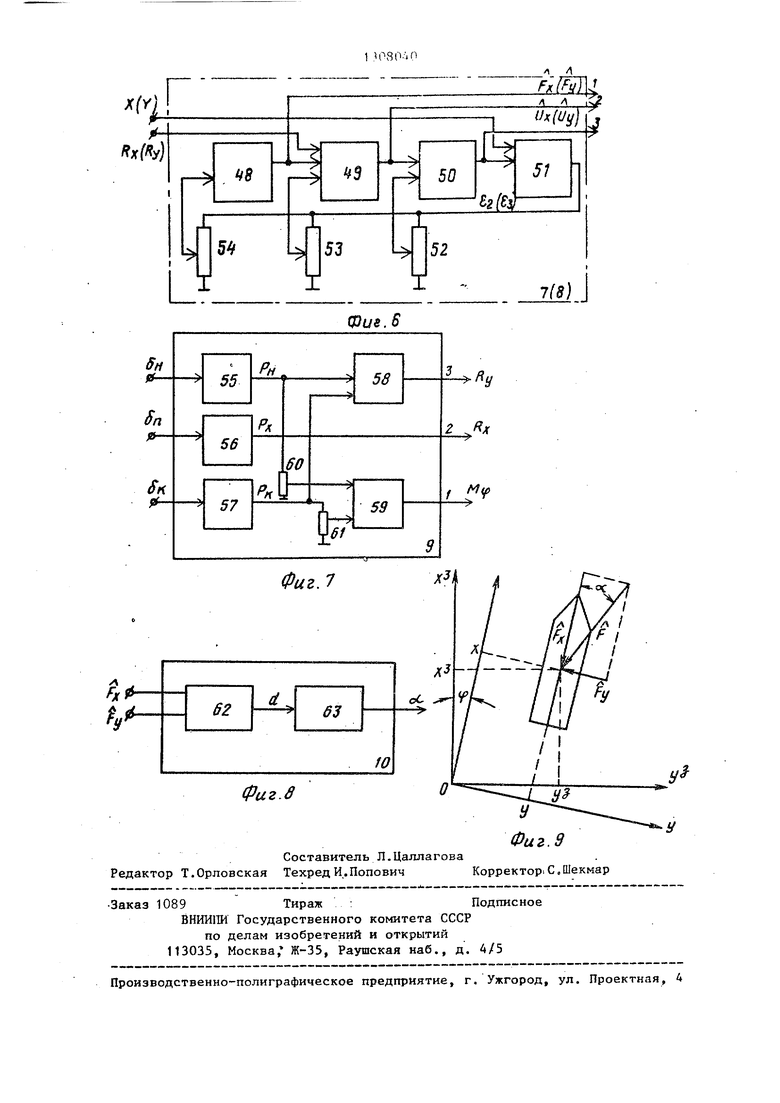
Блок 7 (8) определения -продольной (поперечной) возмущающей силы (фиг. 6) содержит последовательно включенные интеграторы 48, 49, 50 и вычитатель 51, второй вход которого связан с вторым (третьим) выходом преобразователя 2 координат, а выход - через соответствующие потен-
40 циометры
3.
,HHiM со пто5
5
O
5 О 5
0
g 0
5
rtxoriaMU интеграторон i, :ni и входом интегратора tSjO то как третий пход интегратора аЧ связан с вторым (третьим) выходом блока 9 определения управляющего воздействия.
Блок 9 определения упранляющих воздействий (фиг. 7) содержит нелинейные функциональные прсобразовате- - ли 55, 56, 57, сумматоры 58, 59 и потенциометры 60, 61, при этом выход преобразователя 55 связан с первым входом, сумматора 58 и через потенциометр 60 соединен с перя.тм входом сумматора 59, а выход преобразователя 57 - с вторым входом сумматора 58 и через потенциометр 61 с вторым входом сумматора 59.
Блок 10 определения угла действия возмущения (фиг. 8) содержит делитель 62, входы которого подсоеди- нены соответственно к первым выходам блоков 7 и 8, и нелинейньш функциональный преобразователь 63, вход которого соединен с выходом делителя 62, а выход - с шестым входом вычислительного блока 3.
Работает система следуюпл м образом.
Информация о смещениях судна относительно заданной точки морского дна Х, У вырабатьшается в блоке 1 датчиками рассогласований по про- дольному и поперечному перемещениям судна, измеряющими указанные перемещения судна в земной системе координат (центр О которой совмещен с заданной точкой морского дна, а оси ОХ и OY направлены соответственно на Север и Восток). Информация об изменениях курса судна вырабатывается датчиком курса блока 1.
Для упрощения управления линейными перемещениями судна сигналы Х, Y преобразуются в параллельную систему координат XOY, центр которой совпадает с центром земной системы координат, а оси ОХ и OY - параллельны осям судна (фиг. 9). Указанное преобразование координат осуществляется Е преобразонателе 2 по формулам
cos Ч V , Y -Х sin Y cos f ,
(1)
где Xj Y - сигналы смещений судна относительно заданной точки в парал-,
лельной системе координат; ц - сиг- .нал курса судна.
Сигнал (-f курса судна поступает ере.з преобразователь 2 координат на блок 6 фильтрации курса, представляющий собой упрощенную математическую модель судна по курсу, схваченную корректирующими обратными связями по сигналу ошибки мелзду текущими значениями VICTHHH OFO и модельного курса, описываемую систе™ мой диф4|еренциальньпс уравнений второго порядка
I ч; и;+ к„Е,,
I W- Hцf, -г
(2)
где i.f - модельное значение курса , to модельная скорость измене- .ния курса; .
М(, - управляющий момент, (.f - tf-корректирующий сигнал
ошибки по курсу, К sK,..- коэффициенты коррекции.
Сигнал M,,, поступающей из блока 9 определения управляющих воздействий., подается на первый вход интегратора 43, на выходе которого вьфа™ батывается сигнал со модельной скорости изменения курса, интегрируемый интегратором 44, в результате чего на его выходе появляется сигнал ч модельного курса.
Поскольку модель курса, описываемая уравнениями (2), является су- E ecтвeннo упрощенной по отношению к точному математическому описанию изменения курса суднаj изменение модельного курса t/ в общем случ-ае не будет соответствовать изменению цс тинного курса судна. Для того чтобы сигнал cf отслеживал сигнал if истинного курса судна, в вычитателе 45 формируется корректирующий сигнал ошибки между истинным и модельным значениями курса, который поступает на входы интегратора 43, 44 И корректирует модель (2), заставляя ее отслеживать истинные значения угла курса f судна и скорости ы его изменения, I -
Коэффициенты коррек1дии К ,, К , задаются потенциометрами 46, 47 и оп ределя от скорость отслеживания моделью (2) координат и ю судна,Выбором соответствующих значений коэффициентов К, модели (2) задаются такие значения ее постоянных времени, при которых она отслежива08040 6
ет только медленно изменяютяеся составляющие курса Lf и скорости его изменения tO и отфильтровывает быстрые колебательные составляющие указанных
г координат, порожденные воздействием на судно морского волнения и ветровых флуктуации,
Сигналы X, Y с выхода преобразователя 2 координат поступают на вхоfO ды соответственно блоков 7, 8 определения продольной и поперечной возмущающих сил, предс-гавляющих собой упрощенные математические модели судна относительно координат X и Y и
15 постоянных составляющих внешних возмущающих сил, обусловленных действием на судно течения, постоянного волнового давления и постоянной составляющей скорости ветра. Эти модели ох20 ватываются корректирующими обратными связями по сигналам ошибок между те- кутцики значениями соответственно продольного перемещения судна и его модельной величинохг и поперечного пе25 ремещения судна и его модельной величиной и .описьгааются системами дифференциальных уравнений третьего порядка:
30 ).г,
хА 2-1 -г
Vx Rx+Fx+K22e,j ,
F,K,
(3)
Y VyH-KjiEj .,F., ,
35 lFv K33S3
(4)
л
де Fy - модельные значения про- дольной и поперечной
постоянных состав ляю- возмущающих сил;
Ry, R,j - продольное и поперечное . управляюпще воздействия, X, V - модельные значения продольного перемещения судна и скорости его изменения;
л л
Y, Vy, - модельные значения поперечного перемещений судна и скорости его иэме- л нения;
- корректирующий сигнал
ошибки по продольному
перемещению судна;
j Y-Y - корректируюш 1й сигнал
ошибки по поперечному
перемещению судна. Сигнал ), поступающий в лок 7 (8) из блока 9, подается на ход интегратора 49, на вьгхдде которого вырабатывается сигнал V ,. (V) модельтшй скорости продольного (поперечного) перемеп(ения cyatia, который интегрируется интегратором 50, на Bbjxofle -которого появляется сигнал X (Y) модельного продольного, (поперечного) перемещения судна.
На вход вычитателя 51 поступают сигналы X (Y) и X (Y), формируя иа его выходе корректирующий сигнал ошибки ,, - ( з Y - Y ) мелуду истинным и модельным значениями, со- ответстпующего перемещения судна. Подача сигнала (С) через потен- тдиометры 5Aj 53, 52 на входы интеграторов 48, 49, 50 с соответствующими численными з 1ачениями коэффициентов коррекции К , , Kj. ( Kj-, К.,,) обеспечивает отслеживание сигналом X (Y) ИСТ1П1НОГО перемещения. X (Y) судна. При этом сигнал V (Vy) скорости соответствующего -перемещения судна отслеживает истинную скорость перемещения судна V , (Vy) .
Выбором численных значений коэффициентов коррекции 1(21, Kj, , Kji , К,, 5 Kj, моделей (3), (4) задаются такие.значения постоянных времени этих моделей которые обеспечивают отслеживание только медленно меияюпщхся составляющих переменных X, Vv и YJ , отфильтройы- вая быстрые колебательные составляю™ щие в этих сигналах. При этом переменные Fj( , F,, достигают значений постоянных составляю1щх внешних возмущающих сил, действующих на судно в продольном и поперечном направла- ниях, обусловленных течением, волно вым давлением и постояниой состав- .ляющей ветрового давления.. Выработанные таким образом в бяо ках 7, 8 сигналы FX, F позволяют вычислить d действия на судно результирующего вектора возмущений (см. фиг. 9):
,- arctg(- |х)
(5) ,
Вычисление указанного угла- осу- щестБЛ5{атся в блоке 10, куда поступают из блоков 7, 8 сигналы Г, Fy. Делитель 62 вычисляет частное с6
ll 7 S э основе которого в нели V FX .
неином функциональном преобразователе 635 реализующем функциональную зависимость е arc tg (о.) , вычисля
ОЯОб Л i
:Ггс.ч df riocTyriawiuuH на uiecTOi i йход рычислр.тельного блока 3.
На первьп вход блока 3 поступает яз блока 6 фидьтрованный сигнал f 5 скорости изменения курса, Р результате чего на выходе сумматора t9 формируется сигнал хчелаемого управляющего момента М ,; для управления судном по курсу:
M,t К,с/ - К( , (6)
где K.i.,, К 42 весовые коэффициенты, saдaвae ыe потенциометрами 20, 21,
fO
15 На второй и третий входы блока 3 поступают из блока 7 сигналы л и V;, , а па ггетвертьпЧ и пятьп входы - сигналы Y 51 Vy
из блока 8, в результате чего на сумматора 22 и 20 25 форм1 ру отся сигналы желаемых управляющих сил и Ry-j;
52 i;
Y - V,
R
у xSr
-К . X .- К
-S1
R
25
у X
-К
Ь ,
(,1 -yi
(7) (8)
Kf2 fct
К
ьг
весовые ко-
30
35
где К 5-1 ,
эффициенты, зад;авае1 1ые потенциометрами 23, 24, 26, 27,
Для создания желаемьпс значений управляющей поперечной си.пы и вращающего, момента необходимо развить исполнительными средствами судна соответствующие желаемые значения попе- . речных углов иа,носовом и кормовом -. двши телях судна PH.TS ; рассчитываемых по формулам
f.;i;
К
т-г
М
ж
К.. 81 ж
+ К72 Ry.
tly.j
(9) (10)
0
К.
К,
KOO весовые ко0/
5
где К , S ,i
эффициенты, учитывающие расположение исполнительных средств по длине судна j задаваем1з1е потенщ-юметрами 30-33
Желаемые значения упоров F . , Рц; .j; , Т х; прбобрнзуются В нвлиней ных:-функциональных преобразователях 34, 36 J 35 J реалкз 1ощз1х кривые действия винтов соответственно носовой, п кормовой и продольной групп двнжн- телей судна в жeлae iыe значения углов раэв орота c/lj .д п ч лопастей ВРШ двюкителей или углов .разворота движительно-рулевых колоу нок. Сигналы с(, -, .-а поступают на входы блока 4 исполни- : тельньгх сре,цств где усиливаются гидроусилителями 37, 38, 39 п обрабатываются сервомоторами 40, 41, 42,
гаяы до тех пор, покя указапные сиг- палы не скомпегЕсируются соответст- понио сигпллямн обратных связей сЛ, (/j ,сГ,| с датчиков положения исполнительных органов блока 5.
Сигиапы (У| , 5 (Д истинных уг- пон разворота исполнительмык органон судна поступают также на нелинейные фунхциоиальные прео(3раэова- тели 55, 56J 57 блока 9у преобразуясь в з гачени.я управляющих тзоздейст- вйй Р(, J 1 , Pf,., Сигналы Р, 5 P,j. поступают п сумматоры 58, 59, где в со- огветствнн с формулами:
KV - РМ + Pf.
ь, - РК 1«;
(11)
(12)
вьпгисляются истгишые. значения -управ- ляющих гюперечмой силы Ry ir вращаю™ щвго нонеита .. Сигналы Rv, R.,., M, с блока 9 поступают на соответствую- npic -входы блоков 65-7, 8,
образом, благодаря введению в снсте 1у динамической стабилизации блоков 6, 7р 8 обеспечивается фильтрация сигналов X,) X,, выработка фильтрованных сигналов 1А S , Vy скорости изменения курса и скоростей линейных перемещений су;з;на5 а также, полз чения сигналов F., F,, постоянных составляющие продольной и поперечной возмущающих сют. Использование в вычислительном блоке 3 фильтрованных
АЛА /
сигналов л, v,. и У, V, для формирования управляющих сигналов на исполнительные средства судна позвол5;ет существенно (более чем в 10 раз) снизить колебательность исполиктель- ньгх средств судна в процессе его°ди- наг-шческой стабилизации.
Введение в выражение (6) вместо с1-1гнала ошибки по курсу сигнала с угла, действия возмущения обеспечивает автоматический paaaopot судна в сторону уменьшения этого угла вплоть до .его полного списания, при этом судно ориентируют против вектора суммарного действия возмущений. Такая ориентация судна минимизирует расход энер- требуемой для противодействия постоянным внешним возмущающим воздействиям в процессе удержания судна в окрестности заданной точки работ.
Вычис пе {не угла действия на судно результирующего вектора внешних возмущений через фильтрованные .энатанляюших продо.пьной и поперечной возмущающих сил обеспечивает оптимальную ориентацию судна по отнотению к возмущениям практически без рыскания по курсу, что повышает точность стабилизации оптимального курса, снижает колебательность судовых исполнительных органов и повышает
тем caMijiM их ресурс.
Формула изобретения
5 1 Система динамической стабилизации судна, содержащая последовательно соединенные блок датчиков рассогласований по продольному, поперечному перемещениям и курсу судна и
0 преобразователь координат, а также . вычислительный блок, вВ)1ходы которого .подключены соответственно к первому, второму и третьему входам блока исполнительных органов- блок датчиков
5 «обратной связи, входы которого соединены с соответствующими выходами б.пока исполнительных органов, а выходы - соответственно с четвертым, пят.ым и шестым входами бл ока испол0 нительных органов, отличающаяся тем, что, с целью повы- Л1ения точности стабилизации судна и уменьшения энергозатрат, он содержит блок фильтрации, блоки определеj НИН продольной и поперечной возмущающих сил, блок определения управляющих воздействий и блок определения угла действия возмущения, выход которого подключен к первому входу вычнслиQ тельного блока, а первый и второй вхйды - к первым выходам блоков определения продольной и поперечной возмущающих сил соответственно, связанных вторыми и третьи1у|и выходами
со вторым, третьим, четвертым и пя- входами вычислительного блока соответственно, выход блока фильтрации соединен с шестьц-,: входом вычислительного блока, первый вход - с первым
Q выходом преобразователя координат, а второй вход с первым выходом блока определения управляющих воздействий, подключенного вторым ,и третьим выходами к первым входам блоков определее ния продольной И поперечной возмущаю- .цмх сил соответственно, а входами - к соответствующим выходам блока датчиков обратной связи, второй вьрсод преобразователя координат соединен с|
пово
вторым входом блока определения пр.- дольной возмушаюшен силы, а третий выход - с вторым входом блока определения поперечной возмущающей
с ИЛЬ.f.
2. Система по п. 1, отличающаяся тем, что блок фильтрации содержит последовательно соединенные первьй и второй интеграторы
и вычитатель, первый вход первого интегратора связан с вторым входом блока, второй вход вьмитателя подключен к первому входу блока, а вы, ход через соответствующие потенциог метры - к вторым входам интеграторов, выход первого интегратора связан с выходом блока,
иП1 . Г.истемл по п. 1, о т л и ч я- ю m л я с я тем, что блок oiipf- де.чения прппольной (поперочноП) РОЗ- силы содержит послсдона- тел,но соединенные первь. й, второй и третий интеграторы и вычитатель, второй вход которого связан с вторым входом Ьлока, первый вход - с третьим 1;ходом блока, а выход через соответствующие потенциометры - с
входом первого интегратора и вторыми входами второго и третьег о интеграторов первый вход блока подключен к третьему входу второго интегратора, а первые входы второго и третьего интеграторов соединены соответственно с первым и втсрь м выходами бло1ча.
Л
А
Vx
/

| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель местоположения бурового судна | 1983 |
|
SU1134928A1 |
| Система стабилизации бурового судна | 1986 |
|
SU1360405A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2017 |
|
RU2658469C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| Система автоматической стабилизации | 1978 |
|
SU802916A1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |
Изобретение относится к судовой автоматике и решает задачу повышения точности стабилизации местоположения и курса судна и уменьшения энергозатрат на управление судовыми исполнительными органам- посредством оптимальной ориентации судна по курсу и уменьшейия его рыскания. Информация, вьфабатываемая в блоке датчиков рассогласований по линейным перемещениям к курсу судна после ее пересчета Б преобразователе координат местошэложения судна из земной системы координат в параллельн то поступает в корректируемые модели изменений курса и линейных перемещений судна, куда также поступают из блока определения управляющих воздействий сигналы управляющих сил и момента . на основе информации с датчиков обратных связей ВРШ. В моделях вьфаба- тываются сигналы оценок как кинематических параметров судна, на основе которых в вычислительном блоке формируются сигналы желаемых углов разворота лопастей ВРШ судна, так и продольной и поперечной составляющих-F и FV, возмущающих сил. В блоке определения угла действия возмущения по р формуле oi -arctg -j-- вьтисляется 7 сигнал о/ угла действия на судно результирующего вектора внешних возмущений, поступающих в вычислительный блок. Сигнал с/Jвыполняющий функцию сигнала ошибки по курсу авторулевого, обеспечивает автоматический разворот судна в сторону уменьшения этого сигнала вплоть до его полного списания, ориентируя при этом судно против вектора суммарного действия возмущений. 2 з.п. ф-лы, 9 ип. (О О) о О)
Л
2
ншл
S.
шел
cf,
l)f(Sn
ив:3
фиг. 5
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ, УСИЛЕНИЯ, УПРАВЛЕНИЯ И МОДУЛЯЦИИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2153689C2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| , | |||
| Авторское свидетельство СССР № 639337, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
