.М
00
1
00
Изобретение относится к подъемно-транспортным машинам, в частности к лифтостроению.
Цель изобретения - повышение безопасности в эксплуатации подъемника.
На чертеже схематично изображен подъемник, общий вид.
Подъемник содержит лебедку с канатоведущим шкивом 1 и электродвигателем 2, подъемные канаты 3, на которых через упругие подвески 4 подвешены кабина 5 и противовес 6, соединенные между собой контрольным канатом 7, запасованным через обводной блок 8, соединенные осью 9 с рычагом 10.
Рычаг 10 посредством шарнира 11 смонтирован на неподвижном элементе 12 шахты с возможностью поворота в вертикальной плоскости.
На конце рычага 10 закреплен управляющий упор 13 в виде лыжи, взаимодействующий с неподвижным датчиком 14, передающим сигнал в цепь защиты подъемника. Для ограничения перемещения кабины 5 или противовеса 6 внизу к неподвижным элементам 12 шахты закреплены буфера 15, а для ограничения перемещения обводного блока 8 вверх на расстоянии «в от оси 9 обводного блока 8 установлен дополнительный упор 16, также жестко закрепленный к неподвижным элементам 12 шахты.
Подъемник работает следующим образом.
При нормальном режиме работы вращение от электродвигателя 2 лебедки передается .на канатоведущий шкив 1, который за счет сил трения с подъемными канатами 3, на которых через упругие подвески 4 подвешены кабина 5 и противовес 6, перемещает их вверх или вниз.
Контрольный канат 7, соединенный с кабиной 5 и противовесом 6, перемещаясь, вращает обводной блок 8 на оси 9. Так как соединенные между собой подъемные канаты 3, упругие подвески 4, кабина 5, противовес 6 и контрольный канат 7 составляют единую замкнутую кинематическую цепь, то при нормальном режиме работы в периоды движения подъемника с установивщейся скоростью и при стоянке подъемника обводной блок 8, а следовательно, и рычаг 10 неподвижны, расстояние «в между осью 9 и упором 16 не изменяется, лыжа 13 взаимодействует с датчиком 14 и в схему защиты подается сигнал о нормальном функционировании подъемника.
При пусках и остановках подъемника за счет упругости подъемных канатов 3 и подвесок 4 кабина 5 и противовес 6 совершают колебания вверх-вниз с некоторой амплитудой. В это время контрольный канат 7 повторяет колебания кабины 5 и противовеса 6, что приводит к колебаниям обводного блока 8, а соответственно и рычага 10 с управляющим упором 13, совершающего угловые колебания. Для того, чтобы
при пусках и остановках подъемника датчик 14 подавал в схему защиты сигнал о нормальном функционировании подъемника, длина дуги «а управляющего упора 13 должна быть больше максимальной амплитуды
его колебаний (определяется экспериментально).
В случае создания аварийной ситуации, например проходе противовеса 6 на буфер 15, электродвигатель 2 лебедки продолжает
вращать канатоведущий шкив 1 в сторону подъема кабины 5. После длительного вращения канатоведущего шкива 1 относительно неподвижных подъемных канатов 3 происходит их «заклинивание в ручьях канатоведущего шкива 1, и кабина 5 начинает подниматься при неподвижном противовесе 6. Вместе с кабиной 5 поднимаются контрольный канат 7 и обводной блок 8, соединенный осью 9 с рычагом 10. Последний поворачивается вверх в шарнире 11, жестко заQ крепленном к неподвижным элементам 12 шахты. Поворачиваясь, рычаг 10 перемещает закрепленный на нем управляющий упор 13 в виде лыжи, которая, поднявшись на высоту, превышающую а/2, прекращает взаимодействие с датчиком 14, который в этот момент
передает в схему защиты подъемника сигнал о создавшейся аварийной ситуации и выключает электродвигатель 2 лебедки. Происшедший при этом в результате «заклинивания подъемных канатов 3 подъем кабины 5 не влечет за собой возникновения в системе динамических нагрузок, достаточных для разрушения элементов подъемника. Однако в реальных условиях эксплуатации существует вероятность отказа датчика 14, т. е. при создании аварийной ситуации сигнал о ней в схему защиты подъемника не будет выдан.
При этом после «заклинивания подъемных канатов 3 в ручьях канатоведущего шкива 1 поднимающаяся кабина 5 поднимает контрольный канат 7 и обводной блок 8.
0 соединенный осью 9 с рычагом 10. Последний, поворачиваясь вверх в шарнире 11, перемещает закрепленный на нем управляющий упор 13, который, поднявшись на высоту, превышающую а/2, прекращает взаимодействие с датчиком 14. Ввиду отказа датчика 14
5 в схему защиты подъемника сигнал об аварийной ситуации не поступает и двигатель 2 продолжает производить подъем кабины 5 при неподвижном противовесе 6. В этот момент ось 9 обводного блока 8, поднявшаяся на высоту «в (которая соответствует подъему лыжи 13 на высоту, несколько большую а/2), упирается в упор 16, жестко закрепленный к неподвижным элементам 12 шахты, и перемещения кабины 5 вверх не происходит за счет прекращения перемещения обводного блока 8 и соединяющего кабину 5 и противовес 6 контрольного каната 7. Продолжая вращаться в сторону подъема кабины 5, электродвигатель 2 лебедки преодо34
левает в это время момент, значительно боль-ны 5 на высоту, определяемую величиной
ший номинального, в результате чего про-«в перемещения оси 9 (соответствующую
исходит быстрый перегрев его обмотки и онперемещению управляющего упора 13 на
отключается от сети тепловой защитой. Ава-величину, больщую а/2, как и в предыдущем
рийная обстановка прекращается. Проис-случае), исключает возникновение в системе
шедщий при этом в результате «заклини- динамических нагрузок, достаточных для
вания подъемных канатов 3 подъем каби-разрущения элементов подъемника.
1184778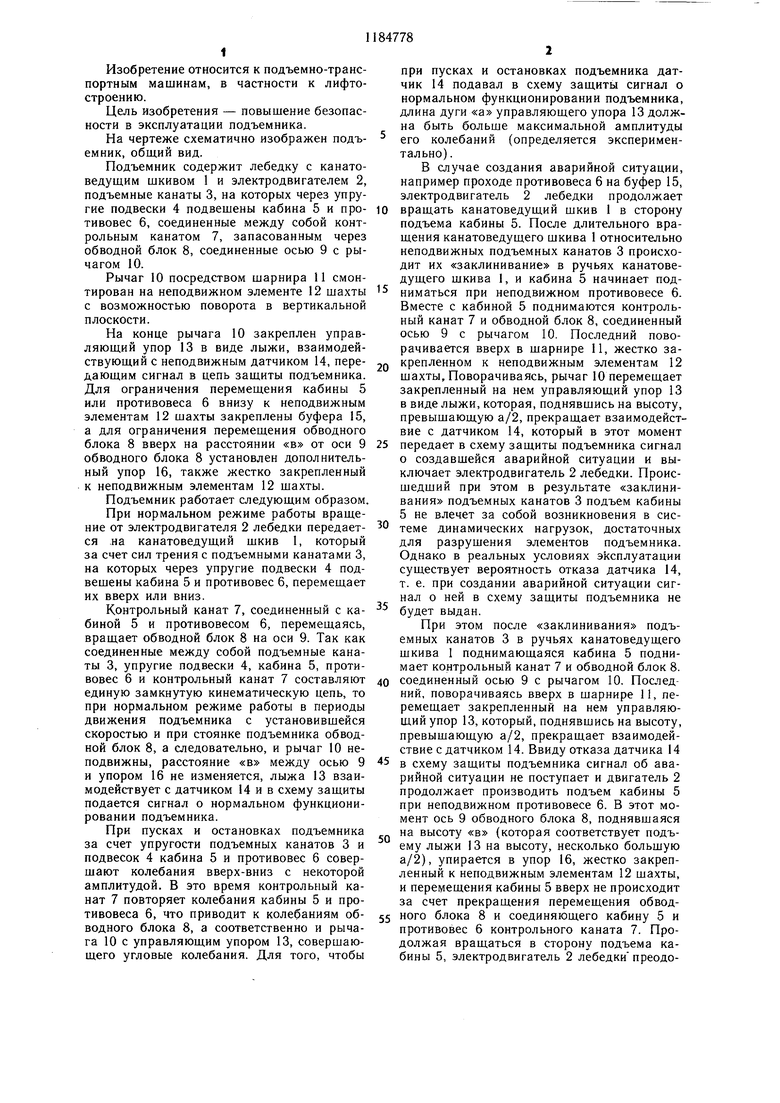
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2618862C2 |
| ПОДЪЕМНИК АВТОМОБИЛЕЙ | 2000 |
|
RU2169692C1 |
| ГРУЗОВОЙ ПОДЪЕМНИК С БЕЗРЕДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И РАЗГРУЗОЧНО-ЛОВИТЕЛЬНЫМ УСТРОЙСТВОМ | 2011 |
|
RU2468982C1 |
| Лифт переменной грузоподъемности | 1982 |
|
SU1049400A1 |
| Шахтный многоканатный подъемник | 1979 |
|
SU839967A1 |
| СПОСОБ ЗАМЕНЫ ТЯГОВОГО КАНАТА КАБИНЫ ЛИФТА В ШАХТЕ | 2008 |
|
RU2373132C1 |
| ЭЛЕКТРОПРИВОД ЛЕБЕДКИ ЛИФТА | 2013 |
|
RU2561682C2 |
| Лифтовая установка | 1978 |
|
SU745848A1 |
| Лифт | 1978 |
|
SU716962A1 |
| Подъемник | 1984 |
|
SU1175850A1 |
ПОДЪЕМНИК, содержащий кабину и противовес, связанные между собой огибающим канатоведущий шкив лебедки подъемным канатом и охватывающим обводной блок контрольным канатом, при этом обводной блок установлен с возможностью вертикального перемещения и кинематически связан с закрепленным на неподвижном элементе щахты датчиком, включенным в цепь защиты подъемника, отличающийся тем, что, с целью повыщения безопасности эксплуатации, он снабжен щарнирно закрепленным на неподвижном элементе шахты рычагом, в средней части которого смонтирован упомянутый обводной блок, установленным на свободном конце рычага управляющим упором, взаимодействующим с указанным датчиком цепи защиты, и закрепленным на неподвижном элементе щахты дополнительным упором для ограничения вертикального перемещения обводного блока.
| Устройство для защиты шахтного подъемника от напуска каната | 1975 |
|
SU541761A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
