Изобретение относится к подъемно-транспортному машиностроению и, в частности, к грузовым канатным подъемникам, используемым при строительстве и эксплуатации промышленных и гражданских объектов, может быть использовано в промышленных и гражданских лифтах, а также в шахтном подъеме.
Известны грузовые подъемники разного тоннажа, содержащие асинхронный барабанный электропривод с редуктором и тяговыми канатами, присоединенными к грузовой платформе и противовесу [Архангельский Г.Г., Волков Д.П. и др. Лифты. Учебник для вузов. - М.: Изд. АСВ, 1999. - Стр.10-11].
Данные подъемники широко используются в промышленном и гражданском строительстве. Недостатками таких грузовых подъемников являются повышенное удельное энергопотребление, большие динамические нагрузки при пуске и останове, а также ограниченные по высоте подъема возможности барабанного привода и необходимость использования громоздких ловителей.
Известен грузовой подъемник, содержащий электропривод с канатоведущим шкивом трения и контр-шкивом, тяговый канат, огибающий указанные шкивы и присоединенный своими концами к грузовой платформе и противовесу, перемещающимися в направляющих несущей рамы [Европейский патент EP 1772413, МПК B66B 11/00; B66B 11/02, опубл. 2007-04-11].
Использование в данном подъемнике канатоведущего шкива трения вместо барабанного привода делает возможным обеспечить подъем грузов практически на любую высоту, а наличие контр-шкива решает проблему реализации высокого тягового фактора шкива трения и исключения скольжения каната. Использование противовеса позволяет уменьшить энергопотребление и мощность привода. Однако в данном подъемнике тяговый канат полностью загружен весом концевого груза, существенную долю которого составляет собственный вес грузовой платформы. Это приводит к увеличению диаметра тягового каната и соответственно диаметра канатоведущего шкива трения.
Известен подъемник, содержащий грузовую платформу (кабину) с противовесом, верхний несущий шкив, огибаемый несущими канатами, на которых подвешены кабина и противовес, а также тяговые канаты, присоединенные снизу к кабине и противовесу и приводимые в действие через систему направляющих блоков лебедкой с тормозным устройством, располагаемыми в нижней части портала или шахты подъемника [Патент РФ на полезную модель №76324, МПК B66B 9/00, опубл. 20.09.2008].
Такая конструктивная схема подъемника позволяет уменьшить нагрузки в тяговых канатах за счет использования несущих канатов и соответственно уменьшить размеры тяговых канатов и канатоведущих барабанов, не решая, однако, проблемы улавливания кабины при обрыве тяговых канатов. В случае обрыва тягового каната на стороне противовеса груженая кабина будет свободно перемещаться вниз (падать), испытывая действие разности весовых усилий груженой кабины и противовеса.
Известен грузовой подъемник, содержащий привод с канатоведущим шкивом трения, направляющий шкив, тяговые канаты, огибающие указанные шкивы и присоединенные к грузовой платформе (кабине) и противовесу, которые перемещаются по направляющим шахты подъемника и снабжены тормозными колодками, обеспечивающими улавливание грузовой платформы и противовеса при обрыве тяговых канатов [Патентная публикация заявки США №US 20070272500, МПК B61H 7/12, опубл. 29.11.2007 г.].
Существенным недостатком устройства улавливания в данном грузовом подъемнике, как и всех ловителей, принцип действия которых основан на обеспечении захвата за проводники, является ударный характер торможения и последующей блокировки грузовой платформы, что зачастую вызывает деформацию ряда элементов конструкции подъемника и отрицательно сказывается на перемещаемых подъемником грузах, особенно при подъеме/спуске людей. Кроме того, для восстановления работоспособности подъемника после срабатывания ловителей, наряду с ревизией всего оборудования, в большинстве случаев необходима замена ловителей, а также проводников.
Наиболее близким по технической сущности к данному изобретению является грузовой подъемник с разгрузочно-ловительным устройством, содержащий частотно-регулируемый электродвигатель с многоручьевым канатоведущим шкивом трения (или канатоведущим шкивом с контр-шкивом), тяговые канаты, огибающие канатоведущий шкив (или канатоведущий шкив с контр-шкивом) и прикрепленные к грузовой платформе и противовесу, а также разгрузочно-ловительное устройство, содержащее несущий (разгрузочно-тормозной) многоручьевой шкив, несущие (разгрузочные) канаты, огибающие разгрузочно-тормозной шкив и прикрепленные к грузовой платформе и противовесу, причем разгрузочно-тормозной шкив (или канатоведущий шкив) снабжен тормозом, выполняющим функции рабочего и предохранительного торможения подъемной системы [Международная заявка №WO 2008/125704, МПК B66B 11/00, опубл. 23.10.2008 г.].
Данный грузовой подъемник принят в качестве прототипа.
Главным недостатком указанного грузового подъемника (прототипа) является совмещение функций рабочего и предохранительного торможения на одном тормозном устройстве. Отказ тормоза неизбежно будет сопровождаться свободным перемещением груженой платформы вниз (падением) под действием разности весов груженой платформы и противовеса. Кроме того, включение предохранительного торможения будет происходить, как правило, с запаздыванием и некоторым разгоном подъемной системы к моменту срабатывания тормозов, что обусловит последующее ударное воздействие на канаты и шкивы с опасностью проскальзывания канатов, а также передачу ударного воздействия на платформу и размещенные на ней грузы.
Технической задачей изобретения является реализация надежного без ударных воздействий улавливания грузовой платформы и противовеса подъемника при одновременной разгрузке тяговых канатов от части веса концевого груза с сохранением возможности обеспечения минимальных мощности привода и энергопотребления, а также минимальных пусковых динамических нагрузок.
Поставленная техническая задача достигается тем, что в грузовом подъемнике с безредукторным электроприводом и разгрузочно-ловительным устройством, содержащем частотно-регулируемый электродвигатель с многоручьевым канатоведущим шкивом трения, одно- или многоручьевой контр-шкив, тяговые канаты, огибающие шкив трения и контр-шкив и прикрепленные к грузовой платформе и противовесу, а также разгрузочно-ловительное устройство, содержащее неподвижный многоручьевой разгрузочно-тормозной шкив, согласно предложенному изобретению разгрузочно-ловительное устройство дополнительно включает подвижный одно- или многоручьевой контр-шкив, два направляющих многоручьевых шкива, огибаемых разгрузочными канатами, прикрепленными к грузовой платформе и противовесу, и две подвижные тормозные колодки многоручьевого профиля, размещенные между разгрузочно-тормозным шкивом и контр-шкивом, причем ось контр-шкива и тормозные колодки перемещаются в двух направляющих, а ось неподвижного разгрузочно-тормозного шкива жестко связана с направляющими, при этом оси шкивов и тормозные колодки соединены стягивающими шпильками с регулировочными гайками и контргайками и расперты пружинами.
Кроме того, грузовой подъемник характеризуется дополнительными существенными признаками
- канатоведущий шкив трения выполнен в виде двухручьевого, или четырехручьевого, или шестиручьевого шкива;
- многоручьевой контр-шкив выполнен в виде двухручьевого шкива или трехручьевого шкива;
- разгрузочно-тормозной шкив выполнен в виде двухручьевого, или четырехручьевого, или шестиручьевого шкива;
- подвижный многоручьевой контр-шкив разгрузочно-ловительного устройства выполнен в виде двухручьевого шкива или трехручьевого шкива;
- разгрузочно-ловительное устройство имеет вертикальное положение с размещением разгрузочно-тормозного шкива на одном уровне с канатоведущим шкивом трения;
- разгрузочно-тормозной шкив размещен над канатоведущим шкивом трения;
- тормозные колодки имеют цилиндрический профиль, а уширенные части разгрузочно-тормозного шкива и контр-шкива разгрузочно-ловительного устройства используются в качестве тормозных поверхностей;
- разгрузочно-тормозной шкив и контр-шкив разгрузочно-ловительного устройства выполнены подвижными и перемещаются в направляющих, а тормозные колодки выполнены неподвижными и жестко связаны с направляющими;
- разгрузочно-ловительное устройство содержит одну тормозную колодку, воздействующую на разгрузочно-тормозной шкив, причем тормозная колодка и разгрузочно-тормозной шкив выполнены подвижными и перемещаются в направляющих разгрузочно-ловительного устройства, а контршкив устройства жестко связан с указанными направляющими.
Технический результат, достижение которого обусловлено реализацией заявляемой совокупности существенных признаков, состоит в повышении надежности улавливания грузовой платформы и противовеса подъемника без ударных воздействий при одновременной разгрузке тяговых канатов от части веса концевого груза.
Сущность изобретения поясняется чертежами, где
на фиг.1 представлена принципиальная схема грузового подъемника с безредукторным электроприводом и разгрузочно-ловительным устройством при горизонтальном расположении последнего,
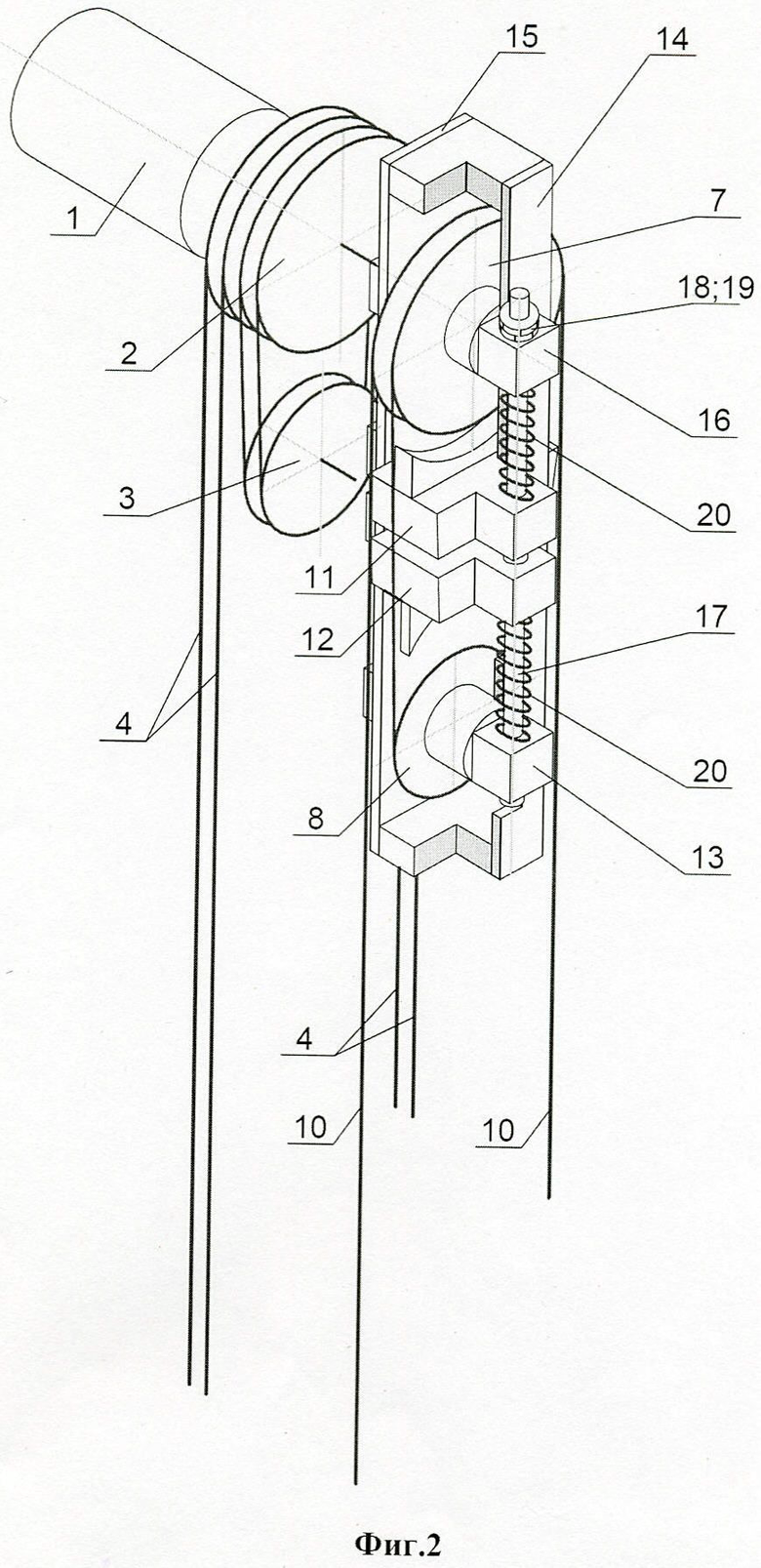
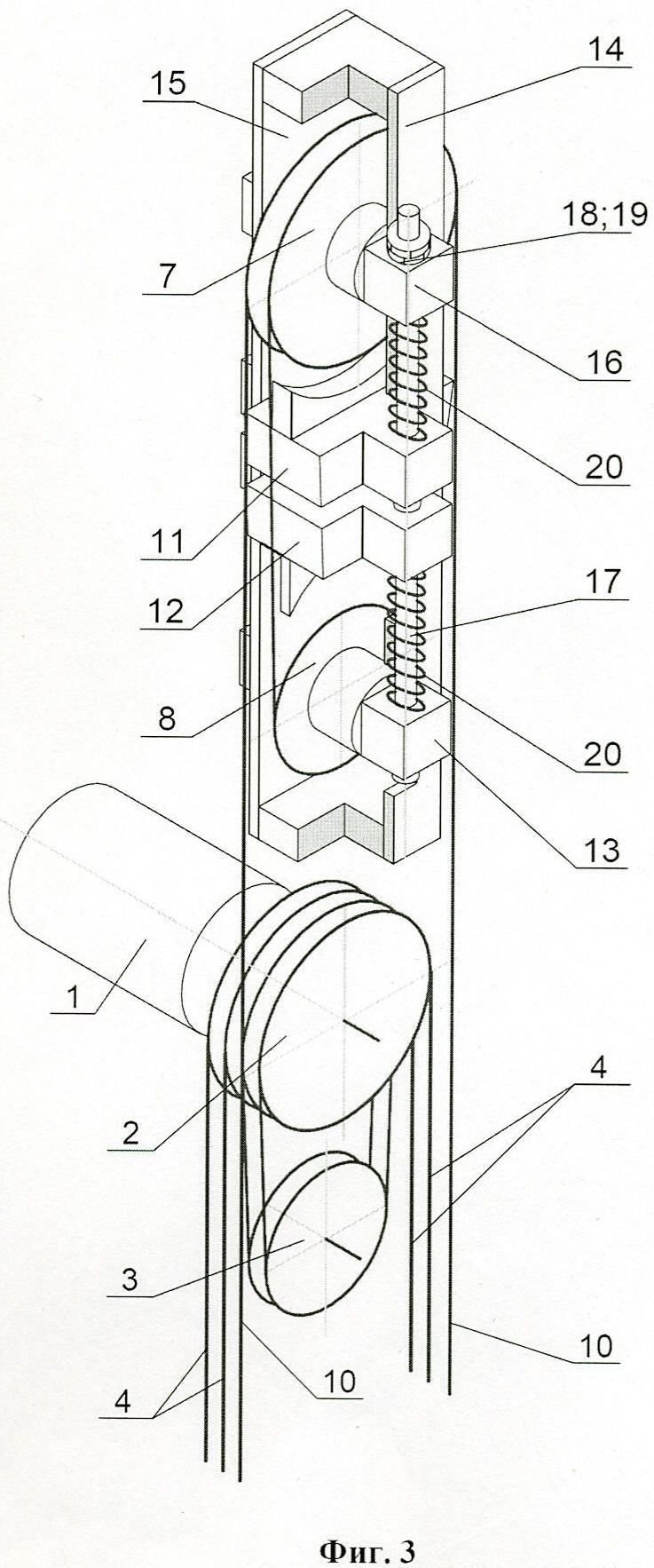
на фиг.2 и 3 представлены варианты схем с вертикальным расположением разгрузочно-ловительного устройствам,
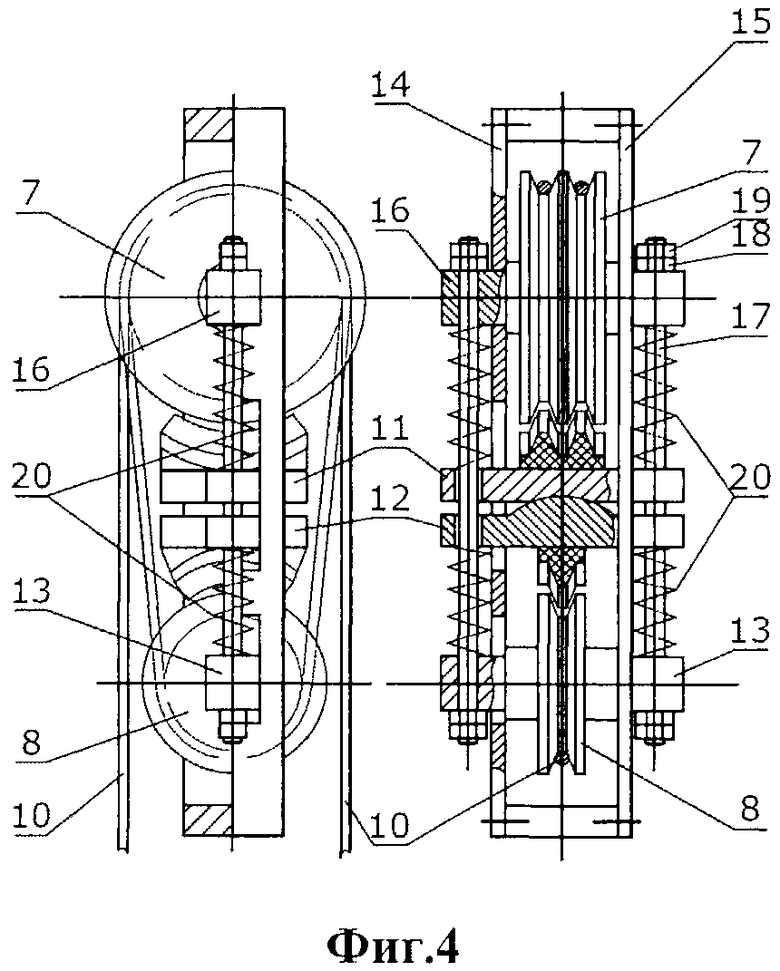
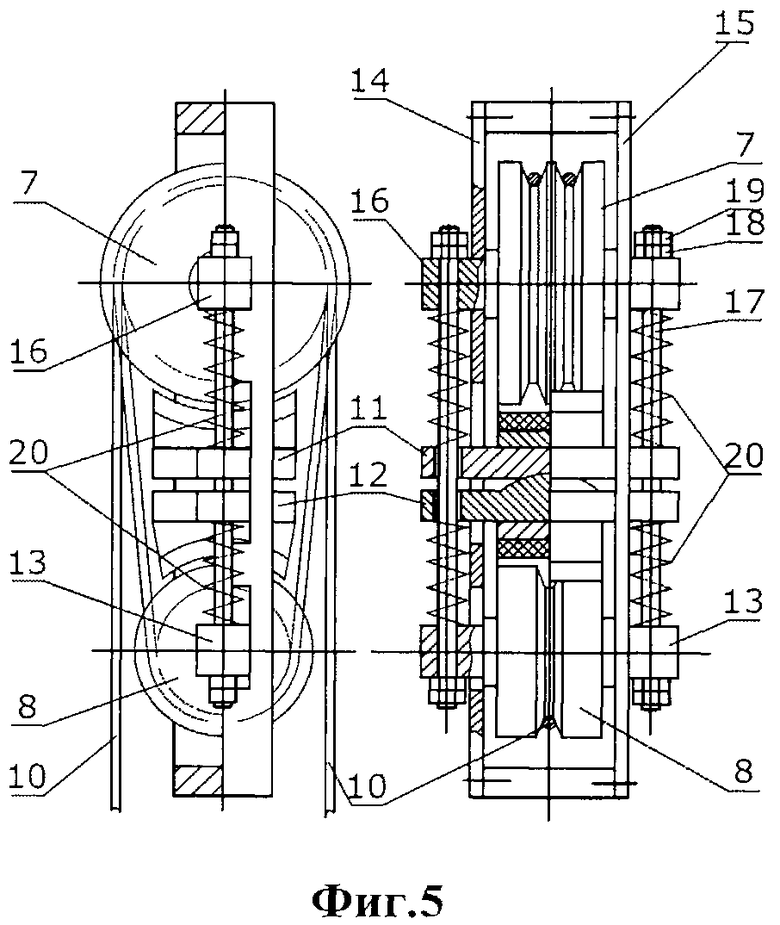
на фиг.4, 5, 6 и 7 представлены варианты конструктивного исполнения разгрузочно-ловительного устройства.
Грузовой подъемник с безредукторным электроприводом и разгрузочно-ловительным устройством состоит из приводной части с грузовой платформой и противовесом и разгрузочно-ловительного устройства (фиг.1).
Приводная часть включает частотно-регулируемый электродвигатель 1 с многоручьевым (двух-, четырех- или шестиручьевым) канатоведущим шкивом трения 2, многоручьевой (одно-, двух- или трехручьевой) контр-шкив 3 и соответственно один-три тяговых каната 4, огибающих шкив трения 2 и контр-шкив 3 и прикрепленных к грузовой платформе 5 и противовесу 6.
Разгрузочно-ловительное устройство содержит неподвижный многоручьевой (двух-, четырех- или шестиручьевой) разгрузочно-тормозной шкив 7, подвижный многоручьевой (соответственно одно-, двух- или трехручьевой) контр-шкив 8, два направляющих многоручьевых шкива 9, огибаемых соответственно одним-тремя разгрузочными канатами 10, прикрепленными к грузовой платформе 5 и противовесу 6, а также две подвижные тормозные колодки 11 и 12 многоручьевого профиля (см. фиг.4), размещенные между разгрузочно-тормозным шкивом и контр-шкивом, причем ось 13 контр-шкива 8 и тормозные колодки 11 и 12 перемещаются в двух направляющих (верхней 14 и нижней 15), а ось 16 неподвижного разгрузочно-тормозного шкива 7 жестко связана с направляющими 14 и 15, при этом оси шкивов 7 и 8 тормозные колодки 11 и 12 соединены стягивающими шпильками 17 с регулировочными гайками 18 и контргайками 19 и расперты пружинами 20.
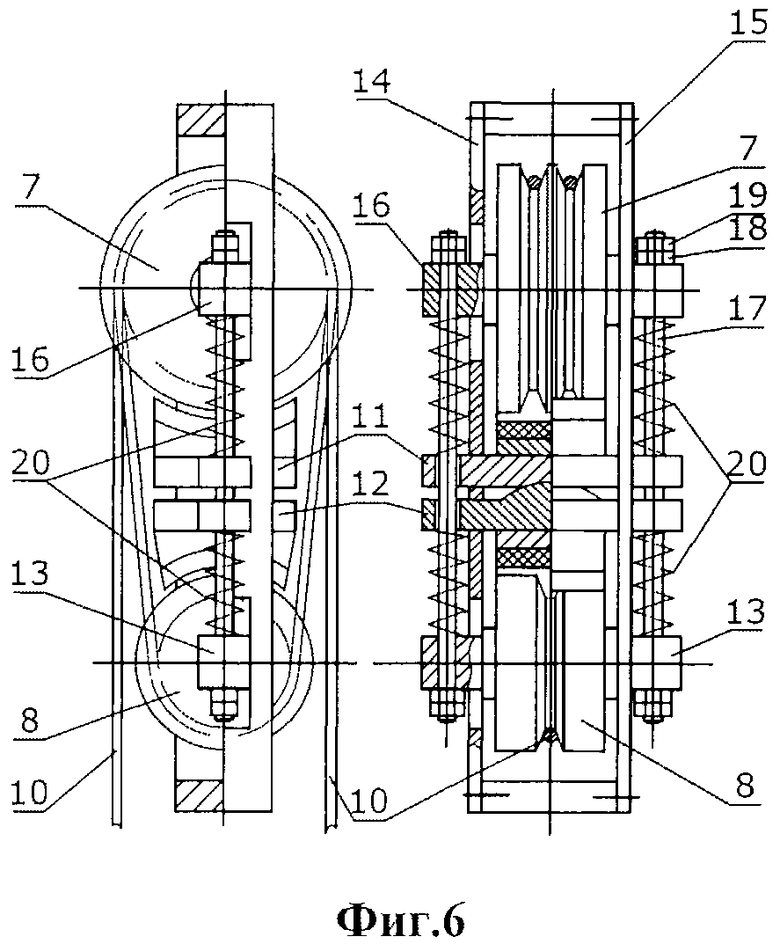
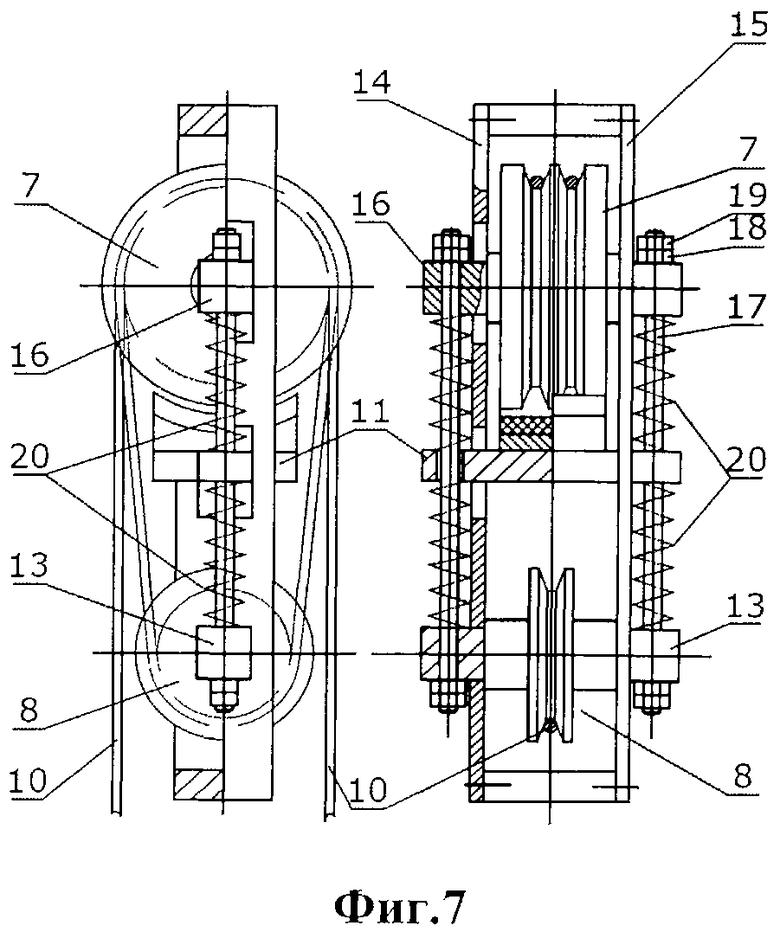
Разгрузочно-ловительное устройство жестко закреплено в несущем портале подъемника и может иметь горизонтальное положение (см. фиг.1), а также вертикальные положения с размещением канатоведущего шкива трения 2 и разгрузочно-тормозного шкива 7 на одном уровне (см. фиг.2) или с размещением разгрузочно-тормозного шкива 7 над канатоведущим шкивом 2 (см. фиг.3). При вертикальном расположении разгрузочно-ловительного устройства направляющие шкивы 9 могут отсутствовать. Профиль поверхностей тормозных колодок 11 и 12 адекватен профилю канатоведущих ручьев подвижного контр-шкива 8 и разгрузочно-тормозного шкива 7 (см. фиг.4). Не исключается также возможность использования тормозных колодок простейшего цилиндрического профиля (см. фиг.5, 6 и 7). При этом периферические части разгрузочно-тормозного шкива и контр-шкива уширяются и используются в качестве тормозных поверхностей (тормозных ободов).
Грузовой подъемник с безредукторным электроприводом и разгрузочно-ловительным устройством работает следующим образом.
При включении частотно-регулируемого электродвигателя 1 создаваемый им крутящий момент передается многоручьевому канатоведущему шкиву 2, который посредством сил трения создает движущие усилия в тяговых канатах 4, огибающих канатоведущий шкив трения 2 и контр-шкив 3 и прикрепленных к грузовой платформе 5 и противовесу 6, перемещая последние соответственно вверх и вниз или наоборот в зависимости от заданного направления вращения электропривода. Контр-шкив 3 обеспечивает увеличение угла охвата канатоведущего шкива 2 тяговыми канатами 4, что способствует увеличению тягового фактора и исключению проскальзывания тяговых канатов 4 относительно канатоведущей поверхности шкива трения 2 в периоды пуска и останова подъемной системы. Этому также способствует частотно-регулируемый электропривод, использование которого в грузовом подъемнике обеспечивает плавный пуск и соответствующее снижение пусковых динамических нагрузок.
Противовес 6, присоединенный к тяговым канатам 4, обеспечивает уменьшение необходимого крутящего момента и соответственно мощности привода грузового подъемника. Оптимальной является масса противовеса, равная собственной массе грузовой платформы 5 и половине массы поднимаемого ею полезного груза. При таком выборе массы противовеса обеспечивается уменьшение в 3 раза мощности привода и энергопотребления по сравнению с грузовыми подъемниками без противовеса.
Пружины 20, навитые вокруг стягивающих шпилек 17, предварительно сжимают при помощи регулировочных гаек 18 и контргаек 19. Усилие сжатых пружин 20, с упором на ось 16 неподвижного разгрузочно-тормозного шкива 7, воздействует на выступы тормозных колодок 12 и 11, а затем и на ось 13 подвижного контр-шкива 8, создавая в разгрузочно-тормозном канате 10 усилия, направленные вверх в точках крепления к грузовой платформе 5 и противовесу 6, что обеспечивает уменьшение нагрузки на тяговые канаты 3. Силовой анализ системы подъема показал, что на разгружающий канат 10 можно передать усилия, равные 90% от разности весов груженой платформы 5 и противовеса 6, уменьшая на эту величину нагрузку на тяговые канаты 6. На удвоенную величину указанного усилия предварительно сжимаются пружины 20 посредством регулировочных гаек 18 и контргаек 19.
Разгрузка тяговых канатов 4 от части веса концевого груза позволяет уменьшить их диаметр и диаметр канатоведущего шкива трения 2 и контр-шкива 3, что способствует уменьшению размеров и стоимости приводной части грузового подъемника.
При аварийном обрыве тяговых канатов на стороне груженой платформы 5 или противовеса 6 суммарный вес платформы и противовеса полностью передается разгружающему канату 10 и воздействует на контр-шкив 8 и разгрузочно-тормозной шкив 7. Под действием увеличившегося усилия в разгрузочно-тормозном канате 10, которое через ось 13 контр-шкива 8 и выступы тормозных колодок 11 и 12 передается на пружины 20, указанные пружины сжимаются, контр-шкив 8 перемещается в сторону неподвижного разгрузочно-тормозного шкива 7, соприкасается с тормозной колодкой 11, провоцируя тем самым первую ступень торможения подъемной системы. При дальнейшем перемещении контр-шкива 8 с тормозными колодками 11 и 12 последняя соприкасается с неподвижным разгрузочно-тормозным шкивом 7, что обеспечивает вторую ступень торможения и последующую окончательную блокировку разгрузочно-тормозного устройства с присоединенными к разгрузочно-тормозному канату 10 грузовой платформой 5 и противовесом 6.
Выбор конструктивной схемы разгрузочно-ловительного устройства зависит от грузоподъемности подъемника, соотношения масс грузовой платформы и поднимаемого груза, а также от фрикционных свойств контактирующих поверхностей тормозов, реализующих необходимый режим замедления и последующей блокировки подъемной системы при предохранительном торможении. При конструктивных схемах, представленных на фиг.4 и 5 (контр-шкив и тормозные колодки подвижны, а разгрузочно-тормозной шкив неподвижен), обеспечивается описанный выше двухступенчатый режим предохранительного торможения. При конструктивной схеме фиг.6 (контр-шкив и разгрузочно-тормозной шкив подвижны, а тормозные колодки неподвижны) обеспечивается реализация режима практически мгновенного срабатывания предохранительного торможения при обрыве тяговых канатов. При конструктивной схеме фиг.7 (разгрузочно-тормозной шкив и тормозные колодки подвижны, а контр-шкив неподвижен) используется одна тормозная колодка, воздействующая только на разгрузочно-тормозной шкив. В этом случае необходимый режим торможения обеспечивается соответствующим расчетом и выбором пружин при заданных фрикционных свойствах материалов контактирующих поверхностей предохранительного торможения.
Торможение и блокировка происходят плавно, исключаются ударные нагрузки на всю систему подъема и существенно снижаются динамические нагрузки по сравнению с улавливанием грузовых сосудов ловителями известных конструкций. При этом система улавливания не испытывает необратимых деформаций и не требует замены или восстановления составляющих ее элементов.
Таким образом, использование данного изобретения позволяет реализовать надежное без ударных воздействий улавливание грузовой платформы и противовеса подъемника при одновременной разгрузке тяговых канатов от части веса концевого груза, что способствует уменьшению размеров и стоимости приводной части грузового подъемника, исключает необходимость восстановления элементов системы улавливания после ее срабатывания с сохранением возможности обеспечения минимальных пусковых динамических нагрузок при минимальной мощности привода и энергопотребления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ЛЕБЕДКИ ЛИФТА | 2013 |
|
RU2561682C2 |
| ПОДЪЕМНИК АВТОМОБИЛЕЙ | 2000 |
|
RU2169692C1 |
| Подъемник | 1990 |
|
SU1765091A2 |
| Устройство для подъема и спуска автосамосвалов из карьеров | 1987 |
|
SU1437337A1 |
| Шахтный многоканатный подъемник | 1979 |
|
SU839967A1 |
| Строительный подъемник | 1980 |
|
SU945042A1 |
| ПАССАЖИРСКИЙ ЛИФТ ДЛЯ МНОГОЭТАЖНЫХ ЗДАНИЙ | 2012 |
|
RU2518458C1 |
| МНОГОКАНАТНАЯ ПОДЪЕМНАЯ УСТАНОВКА | 1999 |
|
RU2184695C2 |
| ШАХТНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2585132C2 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ | 2013 |
|
RU2527626C1 |
Изобретение относится к грузовым канатным подъемникам. Грузовой подъемник с безредукторным электроприводом и разгрузочно-ловительным устройством содержит частотно-регулируемый электродвигатель с многоручьевым канатоведущим шкивом трения, многоручьевой контр-шкив, тяговые канаты и разгрузочно-ловительное устройство. Канаты огибают шкив трения и контр-шкив. Канаты прикреплены к грузовой платформе и противовесу. Разгрузочно-ловительное устройство содержит неподвижный многоручьевой разгрузочно-тормозной шкив, подвижный одно- или многоручьевой контр-шкив, два направляющих многоручьевых шкива и две подвижные тормозные колодки многоручьевого профиля. Разгрузочные канаты огибают направляющие многоручьевые шкивы. Канаты прикреплены к грузовой платформе и противовесу. Тормозные колодки размещены между разгрузочно-тормозным шкивом и контр-шкивом. Ось контр-шкива и тормозные колодки перемещаются в двух направляющих. Ось неподвижного разгрузочно-тормозного шкива жестко связана с направляющими. Оси шкивов и тормозные колодки соединены стягивающими шпильками с регулировочными гайками и контргайками и расперты пружинами. Достигается возможность надежного без ударных воздействий улавливания грузовой платформы и противовеса подъемника при одновременной разгрузке тяговых канатов от части веса концевого груза с сохранением возможности обеспечения минимальных пусковых динамических нагрузок при минимальной мощности привода. 9 з.п. ф-лы, 7 ил.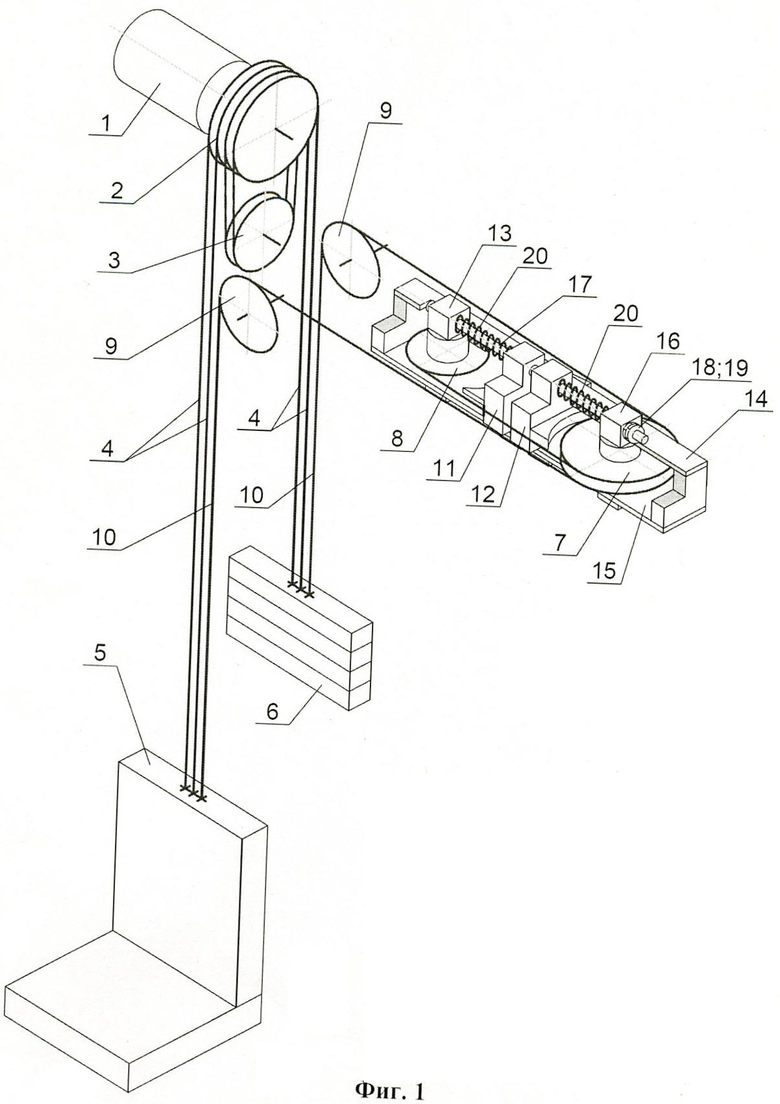
1. Грузовой подъемник с безредукторным электроприводом и разгрузочно-ловительным устройством, содержащий частотно-регулируемый электродвигатель с многоручьевым канатоведущим шкивом трения, одно- или многоручьевой контро-шкив, тяговые канаты, огибающие шкив трения и контро-шкив и прикрепленные к грузовой платформе и противовесу, а также разгрузочно-ловительное устройство, содержащее неподвижный многоручьевой разгрузочно-тормозной шкив, отличающийся тем, что разгрузочно-ловительное устройство дополнительно включает подвижный одно- или многоручьевой контро-шкив, два направляющих многоручьевых шкива, огибаемых разгрузочными канатами, прикрепленными к грузовой платформе и противовесу, и две подвижные тормозные колодки многоручьевого профиля, размещенные между разгрузочно-тормозным шкивом и контро-шкивом, причем ось контро-шкива и тормозные колодки перемещаются в двух направляющих, а ось неподвижного разгрузочно-тормозного шкива жестко связана с направляющими, при этом оси шкивов и тормозные колодки соединены стягивающими шпильками с регулировочными гайками и контргайками и расперты пружинами.
2. Грузовой подъемник по п.1, отличающийся тем, что канатоведущий шкив трения выполнен в виде двухручьевого, или четырехручьевого, или шестиручьевого шкива.
3. Грузовой подъемник по п.1, отличающийся тем, что многоручьевой контро-шкив выполнен в виде двухручьевого шкива или трехручьевого шкива.
4. Грузовой подъемник по п.1, отличающийся тем, что разгрузочно-тормозной шкив выполнен в виде двухручьевого, или четырехручьевого, или шестиручьевого шкива.
5. Грузовой подъемник по п.1, отличающийся тем, что подвижный многоручьевой контро-шкив разгрузочно-ловительного устройства выполнен в виде двухручьевого шкива или трехручьевого шкива.
6. Грузовой подъемник по п.1, отличающийся тем, что разгрузочно-ловительное устройство имеет вертикальное положение с размещением разгрузочно-тормозного шкива на одном уровне с канатоведущим шкивом трения.
7. Грузовой подъемник по п.1, отличающийся тем, что разгрузочно-тормозной шкив размещен над канатоведущим шкивом трения.
8. Грузовой подъемник по п.1, отличающийся тем, что тормозные колодки имеют цилиндрический профиль, а уширенные части разгрузочно-тормозного шкива и контро-шкива разгрузочно-ловительного устройства используются в качестве тормозных поверхностей.
9. Грузовой подъемник по п.1, отличающийся тем, что разгрузочно-тормозной шкив и контро-шкив разгрузочно-ловительного устройства выполнены подвижными и перемещаются в направляющих, а тормозные колодки выполнены неподвижными и жестко связаны с направляющими.
10. Грузовой подъемник по п.1, отличающийся тем, что разгрузочно-ловительное устройство содержит одну тормозную колодку, воздействующую на разгрузочно-тормозной шкив, причем тормозная колодка и разгрузочно-тормозной шкив выполнены подвижными и перемещаются в направляющих разгрузочно-ловительного устройства, а контро-шкив устройства жестко связан с указанными направляющими.
| Способ лечения многооскольчатых переломов бедренной кости у детей | 2023 |
|
RU2823734C1 |
| JP 2002173281 A, 21.06.2002 | |||
| Лифтовая установка | 1978 |
|
SU745848A1 |
| Ротор дезинтегратора | 1982 |
|
SU1071309A1 |

