Изобретение относится к электротехнике, а именно к быстродействующим электроприводам постоянного тока с низкой чувствительностью к изменению его параметров, и является дополнительным к авт. св. № 1072224.
Цель изобретения - улучшение динамических характеристик электропривода за счет уменьшения колебательности при различных значениях заданного ускорения.
На фиг. 1 представлена блок-схема электропривода; на фиг. 2 и 3 - диаграммы, поясняющие его работу.
Электропривод содержит (фиг. 1) последовательно соединенные блок 1 задания скорости, регулятор 2 скорости, задатчик 3 интенciiFJHOCTn тока якоря, регулятор 4 тока якоря и преобразователь 5, подключенный к якорной цепи двигателя 6, инверсные входы регуляторов скорости и тока якоря соединены соответственно с выходами датчика 7 скорости и датчика 8 тока якоря. Задатчик интенсивности тока якоря содержит последовательно включенные усилитель 9 и интегратор 10, в обратной связи которого включен ограничитель 1 1, выход которого связан с входом датчика 12 режима ограничения. Регулятор 2 скорости содержит масштабный усилитель 13, включенный к входам блока 14 выборки-хранения, амплитудного детектора 15 и первого нуль-органа 16. Выход датчика скорости через первое дифференцирующее звено 17 связан с входом второго нуль-органа 18, выходы нуль-органов 16 и 18 подключены к входам схемы 19 ИЛИ, выход которой соединен с управляющим входом амплитудного детектора 15, подключенного к инверсному входу узла 20 сравнения, прямые входы которого соединены с выходами .масштабного усилителя 13 и блока 14 выборки-хранения, а выход узла 20 сравнения соединен с входом задатчика интенсивности тока якоря. Датчик 12 режима ограничения может быть выполнен по принципу измерения тока в ограничителе 11 интегратора. В электропривод введены последовательно соединенные дифференцирующее звено 21 и нуль-орган 22, при этом вход дифференцирующего звена 21 соединен с выходом масштабного усилителя 13, а выход нуль-органа 22 подключен к входу схемы 19 ИЛИ.
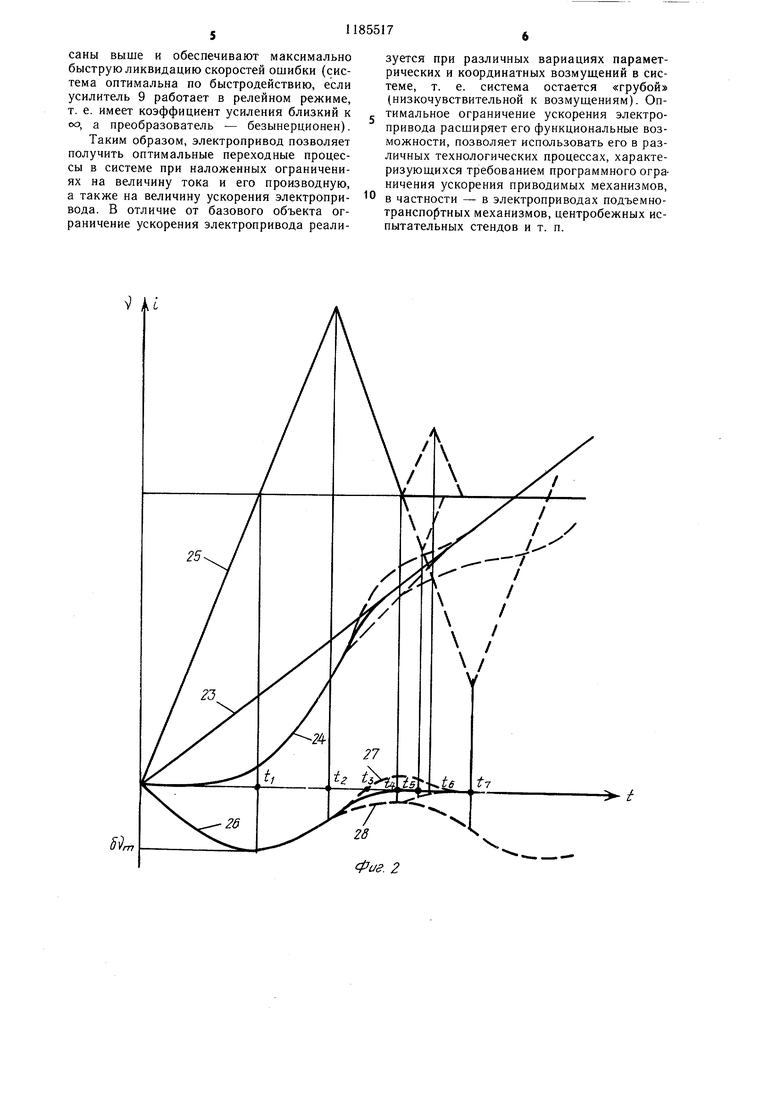
На фиг. 2 представлены кривые 23-28 реакции САР электропривода на линейное изменение сигнала заданной скорости: кривые 23 и 24 - приращения соответственно сигнала задания скорости и скорости электропривода с неизменным моментом инерции; кривая 25 - ток якоря; кривая 26 -динамическая погрещность формирования скорости, кривые 27 и 28 - приращения скорости двигателя при двух различных вариациях момента инерции или ошибках, возникающих, например, в канале измерения и запоминания максимального значения ошибки формирования скорости.
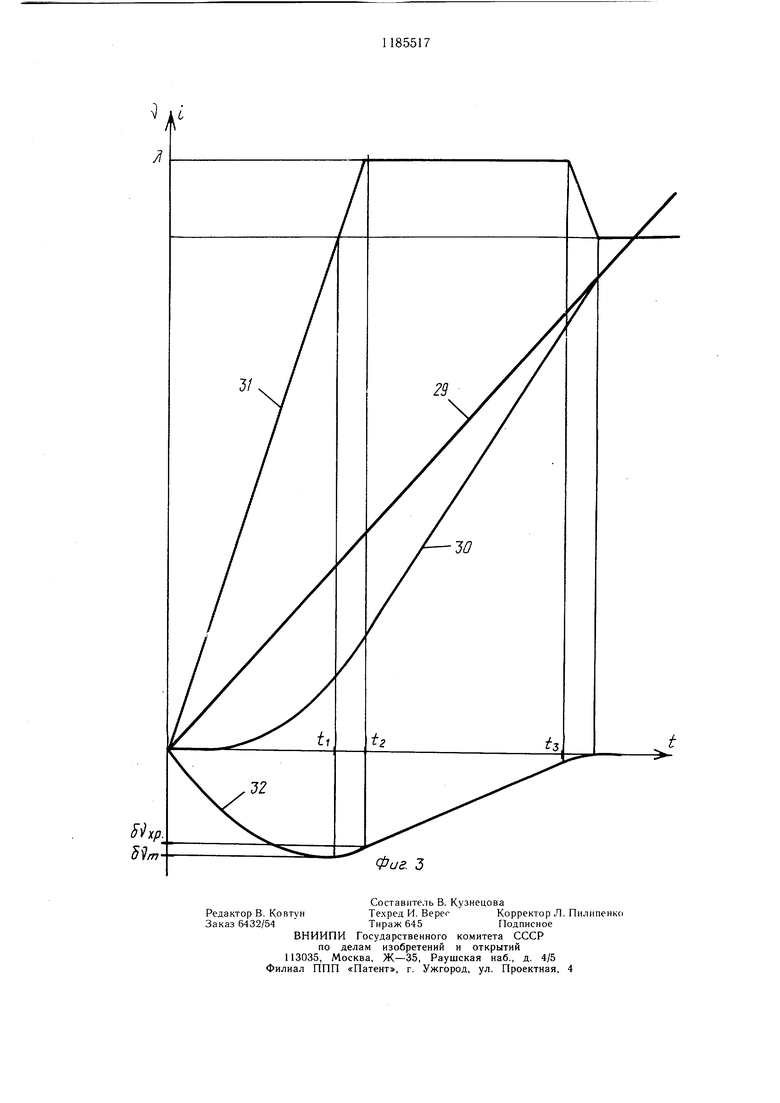
На фиг. 3 изображены кривые 29-32 реакции САР электропривода на линейное изменение сигнала задания скорости, при котором ток якоря достигает максимально допустимое по условиям коммутации значение (выходит на режим ограничения); кривые 29 и 30 - прирапдения соответственно сигнала задания скорости и скорости элект0 ропривода; 31 - кривая тока якоря; 32- кривая динамической погрешности формирования скорости двигателя.
Электропривод работает следующим образом.
В установившемся режиме среднее значение напряжения на выходе масштабного усилителя 13, блока выборки-хранения 14, амплитудного детектора 15 и узла сравнения 20 равно нулю. Малейшее отклонение скорости от заданного значения вызывает появление не равного нулю напряжения на выходе масштабного усилителя 13, блока выборки-хранения 14, амплитудного детектора 15, функционирующих в режиме выборки и, следовательно, результируюо;ее напряжение на выходе узла 20 сравнения определяется величиной и полярностью напряжения масштабного усилителя (напряжения блоков 14 и 15 компенсируют друг друга). На выходе усилителя 9 появляется напряжение, которое интегрируется интегратором
0 10 и вызывает отклонение тока якоря, сводящее к нулю отклонение скорости двигателя. На выходах всех нуль-органов 16, 18 и 22 с большой частотой следования появляются сигнал. логической единицы, поскольку отклонение скорости от заданного значения, производная этого отклонения и производная скорости в установившемся режиме работы электропривода близки к нулю. Импульсы напряжения, появляющиеся на выходе логической схемы 19 ИЛИ, сбрасывают на нуль напряжение амплитудного детектора, обусловленное незначительными отклонениями скорости от заданного значения. Напряжение задания тока якоря на выходе интегратора 10 равно напряжению датчика 8 тока якоря.
При линейном изменении сигнала задания скорости двигателя (кривая 23, фиг. 2) на выходе масштабного усилителя 13 появляется напряжение, пропорциональное разности заданного v и действительного v значения скорости, т. e.(), где Ку -
0 коэффициент усиления масштабного усилителя. Поскольку отклонение скорости увеличивается, амплитудный детектор как и блок выборки-хранения функционирует в режиме выборки и напряжение Uyc на выходе узла 20 сравнения будет равно напряжению масштабного усилителя 13, т. е. Ky().
Усиленное усилите,-ом 9 это напряжение интегрируется (коэффчишент усиления усилителя 9 определяется допустимой величиной производной тока якоря) интегратором 10, что приводит к возрастанию выходного напряжения преобразователя 5 и к нарастанию тока якоря. Если заданная производная тока якоря неизменна, т. е. усилитель находится в режиме насыщения, то ток якоря нарастает по закону, близкому к линейному (кривая 25, фиг. 2). Скорость двигателя нарастает (кривая 24, фиг. 2), но отклонение скорости от заданного значения (кривая 26, фиг. 2) не может мгновенно уменьшаться до нуля и даже продолжает увеличиваться до некоторого момента времени t|. Максимальное отклонение скорости 6vm запоминается амплитудным детектором 15. Напряжение на выходе узла 22 сравнения будет положительным и вызывает рост тока якоря, пока отклонение скорости от заданного значения не станет равным половине максимального отклонения, т. е. Uyc Ку())- Отклонение скорости от заданного значения удвоено, поскольку блок выборки хранения находится в режиме выборки и его выходное напряжение равно Куб, также как и напряжение на выходе масштабного усилителя 13, т. е. на прямые входы узла 20 сравнения подается напряжение 2К.у8), а на инверсный вход - Ky§i)m.
Таким образом, в момент времени to, когда отклонение скорости от заданного значения станет равным половине максимального 6vm, напряжение на выходе усилителя 9 станет отрицательным и ток якоря уменьшается, а отклонение скорости от заданного значения стремится к нулю и с момента времени t4 система электропривода работает в установившемся динамическом режиме (скорость двигателя нарастает по линейному заданному закону).
Любая реальная система характеризуется воздействием на нее параметрических и координатных возмуш,ений. Поэтому, если изменится момент инерции электропривода, неточно запомнится максимальное значение отклонения скорости 6vm или появится действие внешних возмущений САР, то организуется дополнительное движение системы, отличное от оптимального. При этом, если возмущение в системе приводит к перерегулированию, т. е. из.менению знака отклонения скорости от заданного значения (кривая 27, фиг. 2), то в момент времени ts, соответствующий нулевому отклонению скорости от заданного значения, нуль-орган 16 и схема ИЛИ 19 сбрасывают на нуль запомненное ранее амплитудным детектором 15 максимальное отклонение скорости, а в момент времени t4 амплитудный детектор запоминает новое максимальное отклонение скорости от заданного значения. Ток якоря уменьшается до момента времени ts (соответствующая пунктирная кривая тока фиг. 2), т. е. пока отклонение скорости от заданного значения не достигнет половины нового максимального значения. Следовательно, в этом случае организуется описанный выше процесс ликвидации ошибки.
Если же возмущающее воздействие приводит к такому состоянию, что отклонение от заданного значения не достигает нулевого значения (кривая 28, фиг. 2) и если отсутствуют блоки 21 и 22, то уменьщающийся ток якоря вызывает увеличение
0 отклонения скорости от заданного значения, причем ток якоря уменьшается до тех пор, пока отклонение скорости от заданного значения не станет равным половине максимального отклонения скорости, соответствующего моменту времени ti, т. е. до момента
времени t (соответствующая пунктирная кривая тока, фиг. 2). Скорость двигателя совершает колебательные движения около зазаданной, что в большинстве технологических процессов недопустимо.
0 Введение дифференцирующего звена 21 и нуль-органа 22 позволяет сформировать сигнал сброса на нуль напряжения амплитудного детектора 15, поскольку в момент времени t4, соответствующий равенству нулю производной от ошибки 6v скорости, срабатывает нуль-орган 22 и схема ИЛИ 19. В результате амплитудный детектор запоминает новое максимальное отклонение скорости от заданного значения, ток якоря с момента времени 14 начинает нарастать до тех пор, пока текущее отклонение скорости от заданного значения не уменьшится до половины максимального, запомненного амплитудным детектором (момент времени и на фиг. 2). Следовательно, реализуемый системой алгоритм управления позволяет в условиях различных возмущений получить нулевую установившуюся ошибку по скорости при линейном ее задании.
Если заданное ускорение привода достаточно велико, и ток якоря достигает максимально допустимое значение (кривые 29,
31, фиг. 3), то в момент времени t| амплитудный детектор 15 запоминает максимальное отклонение скорости от заданного значения, а в момент времени to достижения током якоря максимального значения срабатывает датчик 12 режима ограничения и блок 14 выборки-хранения переходит в режим хранения, запоминая отклонение скорости 6vv|), соответствующее моменту времени ta. Напряжение на выходе узла сравнения 20 определяется выражением Uyc КУ (6v-f-6v p-б „). Следовательно, ток якоря остается на максимальном уровне, пока отклонение скорости от заданного значения не уменьшится до величины ,,, (момент времени ts на фиг. 3). Затем ток якоря начинает
5 спадать и отклонение скорости от заданного значения плавно устремляется к нулю. Возможные дополнительные движения системы при действующих на нее возмущениях описаны выше и обеспечивают максимально быструю ликвидацию скоростей ошибки (система оптимальна по быстродействию, если усилитель 9 работает в релейном режиме, т. е. имеет коэффициент усиления близкий к со, а преобразователь - безынерционен). Таким образом, электропривод позволяет получить оптимальные переходные процессы в системе при наложенных ограничениях на величину тока и его производную, а также на величину ускорения электропривода. В отличие от базового объекта ограничение ускорения электропривода реализуется при различных вариациях параметрических и координатных возмущений в системе, т. е. система остается «грубой (низкочувствительной к возмущениям). Оптимальное ограничение ускорения электропривода расщиряет его функциональные возможности, позволяет использовать его в различных технологических процессах, характеризующихся требованием программного ограничения ускорения приводимых механизмов, в частности - в электроприводах подъемнотранспо|5тных механизмов, центробежных испытательных стендов и т. п.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1984 |
|
SU1179508A1 |
| Электропривод постоянного тока | 1982 |
|
SU1072224A1 |
| Электропривод постоянного тока | 1984 |
|
SU1159141A1 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| Способ астатического регулирования скорости двигателя постоянного тока | 1982 |
|
SU1067581A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| Электропривод постоянного тока | 1986 |
|
SU1399878A1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| Электропривод постоянного тока | 1985 |
|
SU1300617A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА по авт. св. № 1072224, отличающийся тем, что, с целью улучшения динамических характеристик электропривода путем уменьшения колебательности при различных значениях заданного ускорения, в него введены последовательно включенные дифференцирующее звено и нуль-орган, при этом вход дифференцирующего звена соединен с выходом масщтабного усилителя, а выход нуль-органа подключен к входу схемы ИЛИ. (Л 00 СП ел 7 Фиг.1
/
| Электропривод постоянного тока | 1982 |
|
SU1072224A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ж | |||
