Изобретение относится к электротехнике, а именно к .управлению электроприводами постоянного тока , с независимым возбуждением, питае- NbiM ПО цепи якоря /от управляемого преобразователя, и может быть использовано для систем стабилизации скорости вращения электроприводов, статическая нагрузка и момент инерции которых могут меняться в широких пределах.
Известен способ астматического регулирования скорости двигателя, заключающийся в том, что в закон регулирования вводят интегральную составляющую от ошибки регулировання по скорости, обеспечивающую в усташовившихся режимах нулевую статическую шгабку регулирования скорости 111 .
Недостатком известного способа является то, что при изменении параметров электропривода, в частности момента инерции, в широких пределах показатели качества регулнрования ухудшаются, поскольку параметры ре-/ г.уляторов рассчитываются длд вполне определенных параметров электропривода. Кроме .того, скорость нарастания тока якоря, определяющая условия коммутации дви1 ателя, может оказаться недопустимо большой, поскольку отсутствует ограничение темпа нарастания тока якоря.
Наиболее близким по технической сущности к изобретению является способ астатического регулирования скорости двигателя постоянного тока, при котором в переходных процессах формируют напряжение, пропорцчональ. ное 3 аданной произв;одной тока якоря, интегрируют его, ограничивают на уровне пропорциональном максимально допустимому току якоря и сравнивают полученное напряжение с напряжением, пропорциональным току якоря, результат с эавнёния преобразуют в нэпряжение на якоре двигателя L2.
Недостатком данного- способа является то, что при изменении момента . инерции электропривода качество переходных процессов по данному способу регулирования скоро.сти ухудшается Это связано с тем, что процесс регулирования ведется для объекта с неизменными параметрами.
Цель изобретения - повышение качества регулирования скорости.
Поставленная цель достигается тем, что согласно способу, астатического регулирования скорости двигателя постоянного тока, при котором в переходных процессах формируют напряжение, пропорцио нальное заданг ной производной тока якоря, интегрируют его, ограничивают на уровне .пропорциональном максимально допустимому току якоря и вравнивают по. лученное напряжение-с напряжением, пропорциональнымтоку якоря, результат сравнения преобразуют в напря- . жение на якоре двигателя,-дополни5 тельно определяют напряже.ние, пропорциональное производной скорости двигателя, формируют напряжение, пропорциональное максимальному отклонению скорости в переходном процес0 се, уменьшают его вдвое, сравнивают с.напряжением, пропорционгшЁным теKya etJty значению отклонения скорости, и по результату сравнения формируют напряжение, пропорциональное задан5 ной производной тока якоря при этом напряжение, пропорциональное максимашьному отклонению скорости в переходном процессе, обнуляют при достижении нулевых значений напряжения,
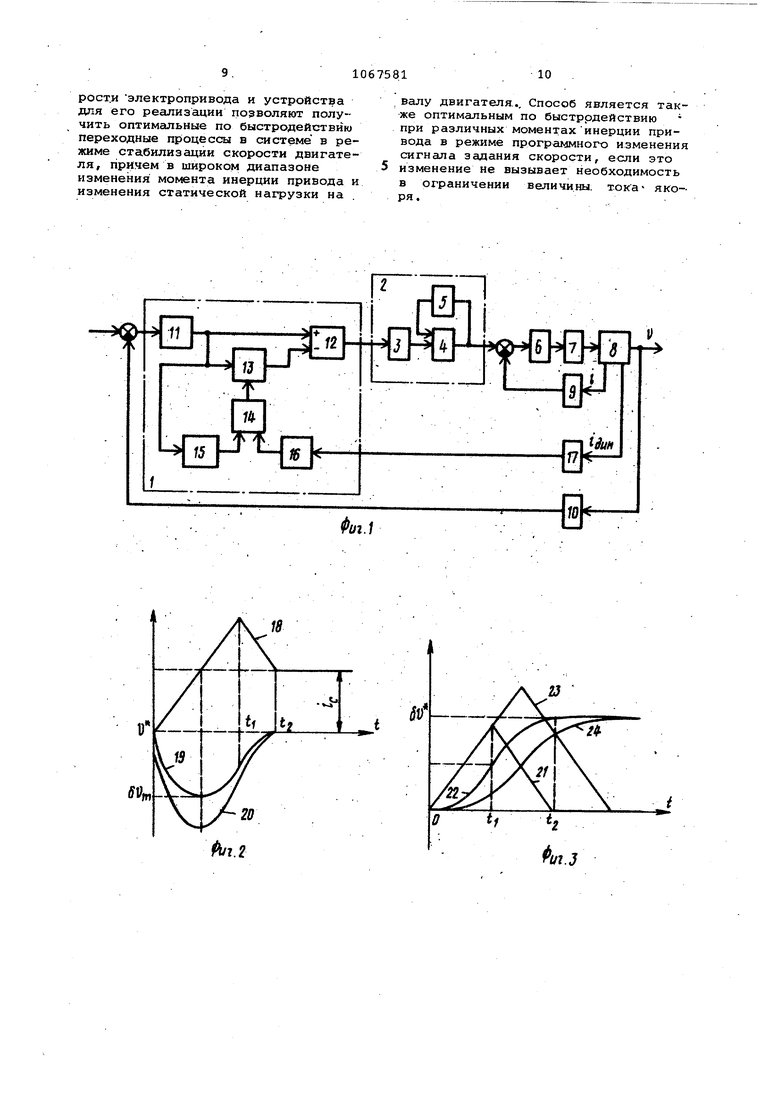
0 пропорционального текущему отклонению сксчзости от заданного значения, или напряжения, -пропсчрционального производной скорости двига еля. На фиг. 1 приведена блок-схема
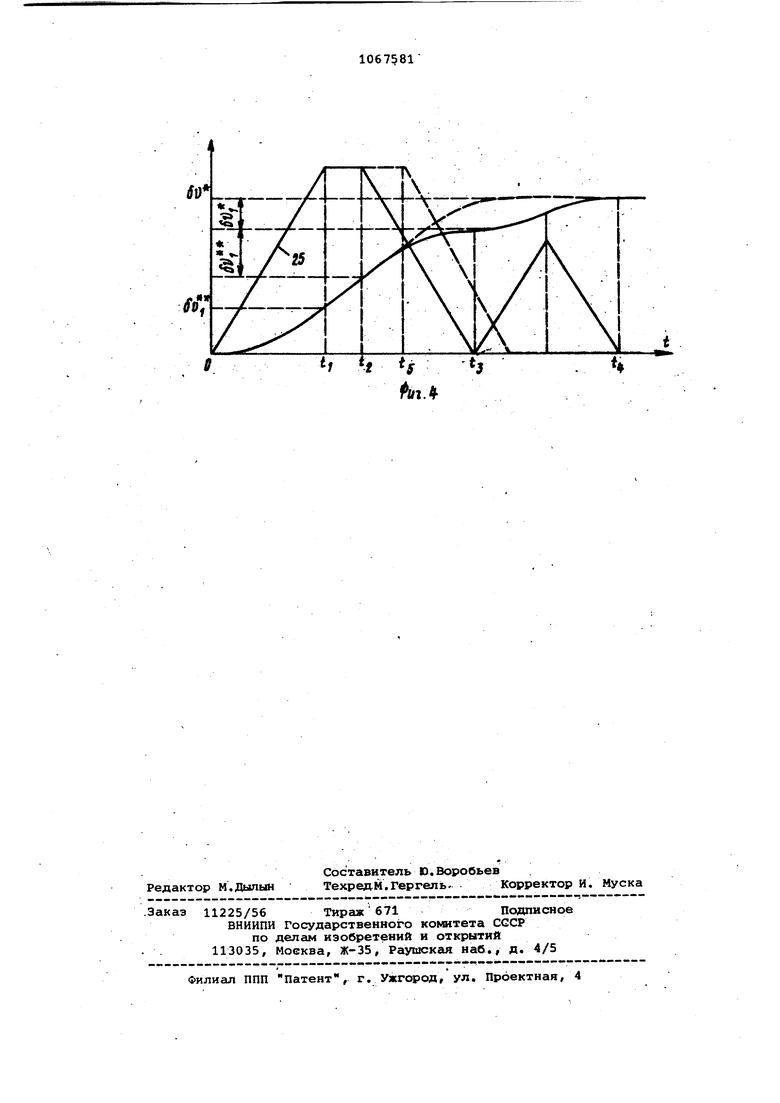
5 устройства, реализующего предпоже н- ный способу на фиг. 2 - кривые переходных процессов при ступенчатом н абросе статической нагрузки на ва,лу привода ( - ток , 19 и 20Q динамическое падение скорости двигателя при двух различных по велйчи не моментах электропривода) J на фиг. 3 - кривЁ е переходШ ЗХ процессов в малом при ступенчатом изменении сигнала задания сксфостй (21 и 23 - ток якоря и- 22 и 24 приращение скорости двигателя при двух различных .по величине моментах инерхщи привода); на фиг. 4 - кривые переходных процессов в большом ,
0 т.е. при достаточно больших ступенчатых приращениях сигнала задания скорости двигателя (25 - ток якоря.
Устройство, реализующее способ,
j состоит (фиг. 1) из последовательно включенных регулятора 1 скорости, задатчика 2 интенсивности тока якоря, содержащего последовательно включенные усилитель-ограничитель 3 и интегриругацее звено 4с элемента- ми 5 ограничения выходного напряжения, регулятора 6 тока якоря, управляемого преобразователя 7, выходом . подключенного к якорной цепи двигателя 8. Датчики 9 тока якоря и дат5 чик 10 скорости двигателя подключены ко входам соответствующих регуляторов; регулятор 1 скорости содержит первый суммирующий усилитель 11, второй суммирующий усилитель 12 с
0 различными коэффициентами передачи по входам, двухсторонний амплитудный детектор 13, логическую схему 14 ИЛИ, нуль-органы 15 и 16, причем выход первого суммирующего усилителя
5 11 подключен ко входам нуль-органа 15, двухстороннего амплитудного.детектора 13 и к первому неинвертирую щему входу второго суммирующего уси лителя 12, ко -второму инвертирующему входу; которого подключен выход дву.хстороннего амплитудного детектора 13, к цепи сброса напряжения последнего подключен выход логической схемы ИЛИ, рходы которой соединены с выходом нуль-органов, вход нуль-органа 16 соединен с выходом датчика 17 динамического тока якоря При функционировании систе1 Ы в условиях изменяющегося сигнала задания скорости, т.е.не в режиме ст билизации скорости, в устройство для реализации способа могут быть введены элементы ограничения выходного напряжения первого суммируквдего усилителя в целях повышения быст родействия системы при больших откл нениях напряжения задания скорости. Устройство работает следукяцнм образом. . - В овившемся режиме работы среднее значение отклонения скороети от заданного значения равно нуглю, т.е. & О. - О, где 0 отклонение скорости от заданного значения; i - заданное значение скорости; V - величина действитель ной скорости двигателя. Средние значения напряжений Од , Ujна выходах соответственно первого И второго сукмирующих усилителей 11 и 12 равны нулю. Среднее значение выходного напряжения Oq двухстороннего амплитуднодр детектора 13 равно нулю, запоминаемые им максимальные мгновенные отклонения скорости от установившегося значения тут же сбра .сываются на нуль, поскольку на выходах, нуль-органов 15 и 16 в кваз«установившихся режимах (отклонение скорости двигателя и ее производная колеблются с достаточно большой частотой около нулевого значения ) формируются сигналы ло1ической 1, воздействующие через логическую схем 14 ИЛИ на цепь Сброса напряжения двухстороннего амплитудного детектора 13. Среднее значение напряжения на выходе усилителя-ограничителя 3 равно нулю, напряжение задания тока якоря на выходе интегрирующего звена 4 равно напряжению датчика 9 тока якоря. При набросе статической нагрузки на валу привода скорость V двигателя падает, что приводит к появлению напряжения, пропорционального откпонению скорости от установившегося значения на выходе первого суммирую щего усилителя 11, т.е. Ui l () где К / - коэффициент усиления первого суммирующего усилителя 11; V установившееся значение скорости двигателя. Двухсторонний амплитудный детектор 13 формирует напряжение, пропорциональное максимальному отклонению скорости в переходном процессе. Второй cy IMиpyюtций усилитель 12 выпол.нен с коэффициентом передачи по неинвертирующему входу, абсолютная величина которого в два раза.больше, чем абсолютная величина коэффициента передачи, по инвертирующему входу этого усилителя. В связи, с этим напряжение, пропорциональное максималь- . ному отклонению с.корости в переходном процессе, уменьшается вдвое. Необходимость уменьшения вдвое напрязкения, пропорционального максимальному отклонению скорости в переходном процессе, обусловлена тем, что при описании управляемого преобразователя 7 безинерционнь1м звеном система управления электроприводом представляет собой интегратор- второго порядка, оптимальный по быстродействию переходный процесс в которой обеспечивается при переключениях.в моменты времени, соответствующие половине максимального отклонения скорости. В суммирующем усилителе 12 уменьшенное, вдвое напряжение, пропорциональное максимальному отклонению скорости, в переходном процессе сравнивается с напряжением, пропорциональным текущему значению отклонения скорости. На выходе усилителя-ограничителя 3 формируется напряжение, пропорциональное заданной производной тока якоря, которое интегрируется . интегрирующим звеном 4 и ограничивается элементом 5 ограничения. Полученное напряжение сравниваетсяс напряжением датчика 9 тока якоря, регулятор 6 .тока якоря формирует напряжение управления преобразователем 7, выходное напряжение которого, будучи приложенным к якорной цепи двигателя 8, вызывает отслеживание током-якоря(кривая 18,фиг.2) линейно нарастакхдего напряжения задания тока якоря -{регулятор тока якоря может иметь ПИ, ПИД или релейную структуру) . Поскольку отклонение скорости от. установившегося значения и производная от скорости двигателя не равны нулю, то напряжение двухстороннего амплитудного детектора 13 не сбрасывается на нуль и он продолжает функционировать в режиме выборки,, пока динамическое падение скорости двигателя 8 не достигнет максимального значения (кривая 19, фиг. 2V Проиэводная от скорости двигателя 8 становится равной,нулю, нуль-орган 16 выдает кратковременный пробный сигнал логической 1 и сбрасывает напряжение двухстороннего амплитудного детектора 13 на нуль, которое сразу же восстанавливается до своего прежнего значения, как только на выходе нуль-органа 16 появляется сигнсШ логического 0 Двухсторонний амплитудный детектор 13 переходит в режим запоминания напряжения, пропорционального максимальному отклонению скорости У. Ток якоря продолжает нарастать пока текущее отклонение rfV скорости от установившегося значения не станет меньше половины максимального отклонения скорости f момент времени -t ,фиг. 2 Как только станет меньше 0, знак напряжения на ; выходе суммирующего усилителя 12 и .усилителяограничителя 3 сменится на обратный и ток якоря линейно спадать, скорость двигателя 8 монотонно устрё.мится к установившемуся значению. В момент равенства тока якоря статическому току (момент времени ti фиг. 2) производная от скорости двит гателя 8 станет равной нулю и происходит пробный сброс напряжения двухстороннего амплитудного детектора 13 на нуль. Если при этом выполняется равенство нулю отклонения скорости от установившегося значения, т.е. cSV - О, то система приходит в установившийся режим и ее Функ1 нонирование становится аналогичным рассмотренному выше. Если в момент равенства нулю производной от скорости двигателя 8 имеет место ненулевое отклонение скорости от установившегося значения, то по сиг налу от нуль-органа 1б бтирается из памяти двухстороннего амплитудно го детектора 13 прежнее запомненное значение максимального отклонения и записывается новое, имеющее место в момент времени t. Напряжение на выходе, второго cyMNBipyraaero усилителя. 12 имеет при этом такой же зна что и и , так как коэффициент его передачи по первому входу в два раза больше, чем по второму. Далее процесс ликвидации отклонения окорости от установившегося значения . аналогичен рассмотренному процессу перехода системы из состояния с мак симальным отклонением скорости SVm в состояние, содтветствуюадее момен ту времени ti (фиг. 2). Поскольку параметры регуляторов не зависят от момента ииерции приврда, хо при про извольном изменений момента инерции например уменьшении, качество переходных процессов не становится хуже (алгоритм работырегулятора скорости останется тем же}, хотя динамический провал скорости, естественно изменяется (становится больше при уменьшении момента инерции привода если приложена такая же по величине статическая нагрузка на валу привода, кривая 20, фиг. 1). Рассмотрим реакцию системы в малом на ступенчатое изменение сигнала задания скорости. Изменение сигнала задания скорости на величину о V вызывает появление сигнала ошибки на выходе первого суг пчирующего усилителя 11.: U K., Такое же напряжение появляется на выходе двухстороннего амплитудного детектора 13 U(j и K:dv, которое, будучи максимальным в данном переходном процессе, запоминается им. Напряжение на выходе второго суммирующего усилителя 12 и напряхсение на выходе усилителя-ограничителя 3 имеет один, и тот же знак, следовательно, ток якоря, отслеживая сигнал задания тока якоря, формируемлй интегрируенвлм звеном, линейно нарастает до тех ; пор, пока текущее отклонение скорости от заданного значения не станет меньше половины максимального отклонения в начсше переходного процесса (кривые 21 тока якоря и 22 приращения скорости двигателя). Как только cPV станет меньше 0, (момент времени -fco фиг. З), напряжение на выходе второго суммирующего усили теля 12 сменит знак, напряжение, задания тока якоря начнет уменьшаться, вызывая линейное уменьшение тока якоря и монотонное приближение скорости двигателя 8 к новому установившемуся значению. При равенстве нулю производной от скорости двигателя 8 (момент времени , фиг.З) происходит сброс на нуль напряжения, запомненного ранее двухсторонним амплитудным детектором 13. Если текущее отклонение скорости при этом равно нулю, то система переходит в новый установив111Ийся режим. Если имеет место, некоторое не равное нулю отклонение Sv скорости от заданного значения, то оно зешоминается двухсторонним амплитуднЕлм детектором 13 и происходит отработка системой этого отклонения в соответствии с описанной выше процедурой. Если момент инерции привода изменился, например возрос, то отработка такого же по величине приращения сигнала задания скорости потребует формирование большего динакмческого тока якоря и, естественно, увеличится время переходного процесса (кривые 23 тока якоря и 24 скорости двигателя, фиг. 3), одна-, ко переходный процесс по-прежнему будет оптимальным по быстродействию, поскольку параметры регулятора скорости не зависит от величины момента инерции привода. При достаточно больших цриращени.ях сигнала задания скорости (фиг. 4 линейно нарастающее напряжение Hai выходе интегрирующего звена 4 достигает своего максимального значения и ограничивается элемен тами 5 ограничения в простейшем случае двумя встречно включенными стабилитронами, ток якоря двигателя (кривая 25) также выходит на режим ограничения(момент времени-t фиг, 1. При отсутствии статической нагрузки на валу привода скорость двигателя линейно нарастает, поскольку является интегралом от постоянного динамического тока якоря. Напряжение на выходе первого суммирующего усилителя 11 изменяется про порционально отклонению скорости от заданного значения, а на выходе двухстороннего амплитудного детектора 13 хранится напряжение, пропор циональное максимальному отклонению (Sv скорости от заданного значения. Выходное напряжение второго суммиру щего усилителя 12 сменяет свой знак когда отклонение скорости от заданного значения станет меньше половины максимсшьного отклонения скороети (момент времени ti г фиг. 4). При этом ток якоря начинает умень-шаться и скорость двигателя стремит ся к некоторому установившемуся зна чению. Когда производная от скороети двигателя 8 станет равной нулю (момент времени Ьз , фиг.4 нуль-орган 16 выдает сигнал логической 1 и через схему 14 ИЛИ сбрасывает на нуль напряжение двухстороннего амплитудного детектора 13. На внходе второго сукмирукнцего усилителя 12 снова появляется напряжение того же знака, что и U , ток якоря ,и скорость двигателя 8 начинают нарастать, а на выходе двухстороннего амплитудного детектора 13 запоминается напряжение, пропорциональное отклонению скорости (Sv в момент времени -tj (фиг. 4). В дгшьнейшем процесс отработки отклонения скорое ти от заданного значения аналогичен рассмотренному выше и в некоторый момент времени образуется новый установившийся режим. Очевидно, что переходный процесс отработки достаточно больших приращений сигнала за дания скорости не является оптимальным по быстродействию. Однако переходный процесс станет оптимальным по быстродействию, если ввести элементы ограничения выходного сигнала первого суммирующего усилителя 11 (на блок-схеме они не показаны), ограничив его напряжение на уровне, ЛРРпорциональном удвоенному значению отклонения скорости двигателя 8 от начального значения (фиг.4 в момент времени -Ьл . В этом случае максимальное значение запомиеного сигнала на выходе двухстороннего амплитудного детектора li также ограничено на уровне . K 2i:5v/. Выходное напряжение второго суммирующего усилителя 12 сменяет свой знак в момент времени -t фиг. 4), когда отклонение скорости от заданного значения становится меньше отклонения vt скорости от начального значения. При этом ток якоря начинает линейно спадать, а скорость двигателя монотонно устремляется к новому установившемуся заданному значению (пунктирные линии, фиг. 4). Величину относительного отклонения с5 V tSKopocTH двигателя от начального значения можно подсчитать по формуле тг/у«ч ь где Tj инерционная постоянлая времени привода (Опр приведенный к валу двигателя в момент инерции привода; и)н , Мц - номинальные значения скорости и электромагнитного момента двигателя ; i-qurt - относительное значение динамического тока якоря двигателя. Поскольку при отсутствии статической нагрузки на валу привода динамический ток равен току якоря, то Цци Tut где TU можно записать постоянная интегрирования сигнала задания тока якоря. Тогда величина относительного отклонения определяется J13 выражения SV т- т Если ток якоря двигателя ограничивать на уровне I 23ц, где Зн номинальное относительное значение тока якоря, то с учетом изложенного будет справедливым соотношение i- t J 2. Принимая во внимание посТч. леднее выражение, получим ГФКГ . Поскольку, расчетная величина отклон ия iSy скорости от начального зиачения зависит от величины момента инерции привода, то очевидно, 41:0 при досФаточно дриращениях сигнала задания скорости и изменениях момента инерции привода система в общем случае не будет оптимальной по быстродействию. Таким образом, предложенный способ астатического регулирования скорост.и электропривода и устройства для его реализации позволяют получить оптимальные по быстродействию переходные процессы в системе в режиме стабилизации скорости двигателя , причем в широком диапазоне изменения момента инерции привода и изменения статической нагрузки на
валу двигателя... Способ является также оптимальным по быстррдействию при различных моментахинерции привода в режиме программного изменения сигнала задания скорости, если это изменение не вызывает необходимость в ограничении величины, тока- яко-ря.,

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1982 |
|
SU1072224A1 |
| Электропривод постоянного тока | 1983 |
|
SU1185517A2 |
| Электропривод постоянного тока | 1984 |
|
SU1179508A1 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| Электропривод постоянного тока | 1984 |
|
SU1159141A1 |
| Электропривод постоянного тока | 1986 |
|
SU1399878A1 |
| Устройство управления скоростным режимом двигателей смежных клетей сортопрокатного стана | 1977 |
|
SU728953A1 |
| Электропривод постоянного тока | 1985 |
|
SU1332497A1 |
| Система управления электроприводом | 1988 |
|
SU1817058A1 |
| Система управления положением | 1987 |
|
SU1513415A1 |
СПОСОБ АСТАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА, при котором-в переходных процессах Формируют напряжение, пропорциональное заданной производной тока якоря, интегрируют его, ограничивают на уровне пррпорх кональном максимсшьно допустимому току якоря и сравнивёиот полученное- напряжение с напряжением, пропорциональным току якоря, результат сравнения преобразуют в напряжение на якоре двигателя, отл и ч ающи йся тем, что, с целью повышения качества регулирования, дополнительно определяют напряжение, пропорциональное -производной скорости двигателя, формируют напряжение, пропорциональное максимальному отклонению скорости в переходном процессе, уменьшают его вдвое, сравнивают с натфяжением, пропорциональным текущему значению отклонения скорости, и по результату сравнения формируют .напряжение, пропорциональное заданной производной тока якоря, при этом напряжение, пропорциональное максимальному отклонению скорости в переходном процессе, .обнуляют при достижении нулевых значений (О напряжения, пропорционального текущему отклонению скорости от заданного значения, или напряжения, пропорционального производной скорости двигателя. о 9) ч СЛ 00
-/
SV
..Г
tfl)
,
,««| f
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Двухкратноинтегрирующая система подчиненного регулирования скорости привода | 1973 |
|
SU479208A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| () | |||
