Изобретение относится к области систем управления электроприводами, содержащими в кинематике механического объекта управления упругие или упругодиссипативные элементы, в частности электроприводы испытательных стендов электроэнергетических объектов, таких как газотурбинные двигатели газоперекачивающих станций и газотурбинных электростанций, бумагоделательных машин, прокатных станов и др.
Основной управляемой фазовой переменной в большинстве электромеханических объектов управления является угловая скорость вращения исполнительного механизма (рабочего органа - РО), а основной режим работы - стабилизация этой координаты в заданном диапазоне с высокой точностью при изменениях нагрузки на валу РО. Рабочий орган в силу наличия редуктора (мультипликатора) или длинного вала содержит упругодиссипативные кинематические связи, что усложняет процесс управления выходной координатой - скоростью вращения вала рабочего органа.
Известны технические решения, обеспечивающие оптимальное движение РО на основе контроля скорости вращения приводного электродвигателя с подчиненным регулированием координат электропривода.
Известен электропривод с упругими связями, содержащий последовательно включенные регуляторы скорости и тока, силовой преобразователь энергии, электродвигатель, редуктор, рабочий орган, а также датчик скорости вращения вала электродвигателя и датчик тока, включенные в обратные связи соответствующих регуляторов [Борцов Ю.А., Соколовский Г.Г. Тиристорные системы электропривода с упругими связями. - Л.: Энергия, Ленингр. отд-ние, 1979.-160 с.].
Недостатком известного электропривода является то, что при настройке системы управления на технический или симметричный оптимум и наличии упругих связей в объекте требуется либо механическое демпфирование скорости рабочего органа, либо снижения быстродействия контура регулирования скорости электродвигателя в два и более раз по сравнению с системой без упругих связей.
Известен электропривод постоянного тока, содержащий электродвигатель, подключенный к выходу преобразователя, и последовательно соединенные блок задания, регулятор скорости, усилитель-ограничитель, регулятор тока, выход которого соединен с входом преобразователя, датчики тока якоря и частоты вращения, выходы которых подключены к входам соответствующих регуляторов. Регулятор скорости включает дифференцирующее звено, подключенное входом к выходу датчика частоты вращения, устройство выборки-хранения, первый и второй узлы сравнения, причем входы первого узла сравнения подключены к первому выходу блока задания и выходу датчика скорости вращения. В него введены первый, второй и третий масштабные усилители, третий узел сравнения и генератор тактовых импульсов, причем входы второго узла сравнения соединены с вторым выходом блока задания и выходом дифференцирующего звена, выходы первого и второго узлов сравнения подключены к входам первого и второго масштабных усилителей, выход датчика тока якоря соединен с входом третьего масштабного усилителя, выходы масштабных усилителей соединены с входами третьего узла сравнения, выход которого соединен с входом устройства выборки-хранения, выход которого подключен к входу усилителя-ограничителя, выход генератора тактовых импульсов соединен с управляющим входом устройства выборки-хранения [авторское свидетельство №1399878, кл. Н02Р 5/06, 1988]. Известный электропривод позволяет получить оптимальные по быстродействию переходные процессы как при ступенчатом, так и при линейном задании скорости вращения, а также астатизм регулирования скорости при изменении нагрузки на валу РО.
Недостатком известного электропривода является отсутствие схемно-технических и алгоритмических возможностей демпфирования колебаний вала РО при наличии упругих связей в его кинематике и, как следствие, появление колебаний при любых аддитивных воздействиях как со стороны изменения задающих воздействий, так и изменения возмущений со стороны нагрузки на валу РО.
Наиболее эффективны в отношении подавления колебаний упруговязких электромеханических систем, обеспечивающих высокие показатели качества стабилизации заданной скорости вращения рабочего органа, являются технические решения, базирующиеся на принципах электромеханического демпфирования.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является электропривод с упругими связями, в котором реализованы обратные связи не только по скорости двигателя, но и по скорости рабочего органа и упругому моменту. Электропривод содержит последовательно включенные блок задания скорости, регулятор скорости, замкнутый контур регулирования тока с датчиком тока якоря, электродвигатель, РО с упругими связями. Датчики скорости вращения вала электродвигателя и скорости вращения вала РО подключены через соответствующие обратным связям масштабирующие элементы и заведены на узел сложения, выход которого включен в отрицательную обратную связь узла сравнения регулятора скорости. Выход с регулятора скорости через узел сравнения, в который через соответствующий масштабирующий элемент включен датчик упругого момента (угла скручивания упругих валов), подается на замкнутый контур регулирования тока [Борцов Ю.А., Соколовский Г.Г. Автоматизированный электропривод с упругими связями. - 2-е изд., перераб. и доп.- СПб.: Энергоатомиздат. Санкт-Петербург, отд-ние, 1992.-288 с.]. Данное устройство принято за прототип.
Признаки прототипа, являющиеся общими с заявленным изобретением: последовательно соединенные блок задания скорости, регулятор скорости, замкнутый контур регулирования тока с датчиком тока якоря, электромеханическая часть двигателя, рабочий орган с упругими связями; датчик скорости вала рабочего органа; датчик скорости вала двигателя; датчик упругого момента, установленный на валу рабочего органа.
Недостатком известного устройства, принятого за прототип, является низкое качество отработки задающих и возмущающих воздействий. При этом скорость вращения РО не отвечает ни требованиям предельного быстродействия, ни требованиям минимума динамической ошибки отработки аддитивных воздействий.
Задачей изобретения является обеспечение наибольшего быстродействия и минимума динамической погрешности при регулировании скорости РО в электромеханической системе с упругими связями.
Поставленная задача решается за счет того, что в известном электроприводе, содержащем последовательно соединенные блок задания скорости, регулятор скорости, замкнутый контур регулирования тока с датчиком тока якоря, электромеханическую часть двигателя, рабочий орган с упругими связями, а также датчик скорости вала рабочего органа, датчик скорости вала двигателя и датчик упругого момента, установленный на валу рабочего органа, согласно изобретению на валу рабочего органа механизма дополнительно установлен датчик статической нагрузки, а регулятор скорости включает дифференцирующее звено, подключенное к выходу блока задания скорости, семь масштабирующих элементов и последовательно соединенные суммирующий элемент и интерполятор нулевого порядка, при этом вход первого масштабирующего элемента подключен к выходу блока задания скорости, вход второго масштабирующего элемента подключен к дифференцирующему звену, вход третьего масштабирующего элемента подключен к выходу датчика статической нагрузки, вход четвертого масштабирующего элемента подключен к выходу датчика тока якоря, вход которого подключен к выходу замкнутого контура регулирования тока, вход пятого масштабирующего элемента подключен к выходу датчика скорости вала двигателя, вход шестого масштабирующего элемента подключен к выходу датчика упругого момента, вход седьмого масштабирующего элемента подключен к выходу датчика скорости вала рабочего органа, выходы всех масштабирующих элементов подключены к входам суммирующего элемента.
Отличительные признаки предлагаемого устройства от прототипа - датчик статической нагрузки, установленный на валу рабочего органа механизма; регулятор скорости включает дифференцирующее звено, подключенное к выходу блока задания скорости, семь масштабирующих элементов и последовательно соединенные суммирующий элемент и интерполятор нулевого порядка; вход первого масштабирующего элемента подключен к выходу блока задания скорости; вход второго масштабирующего элемента подключен к дифференцирующему звену; вход третьего масштабирующего элемента подключен к выходу датчика статической нагрузки; вход четвертого масштабирующего элемента подключен к выходу датчика тока якоря, вход которого подключен к выходу замкнутого контура регулирования тока; вход пятого масштабирующего элемента подключен к выходу датчика скорости вала двигателя; вход шестого масштабирующего элемента подключен к выходу датчика упругого момента; вход седьмого масштабирующего элемента подключен к выходу датчика скорости вала рабочего органа; выходы всех масштабирующих элементов подключены к входам суммирующего элемента.
Отличительные признаки в сочетании с известными позволяют обеспечить наибольшее быстродействие и минимум динамической погрешности при отработке задания скорости рабочего органа и изменениях нагрузки на его валу.
На фиг.1 представлена функциональная схема электропривода.
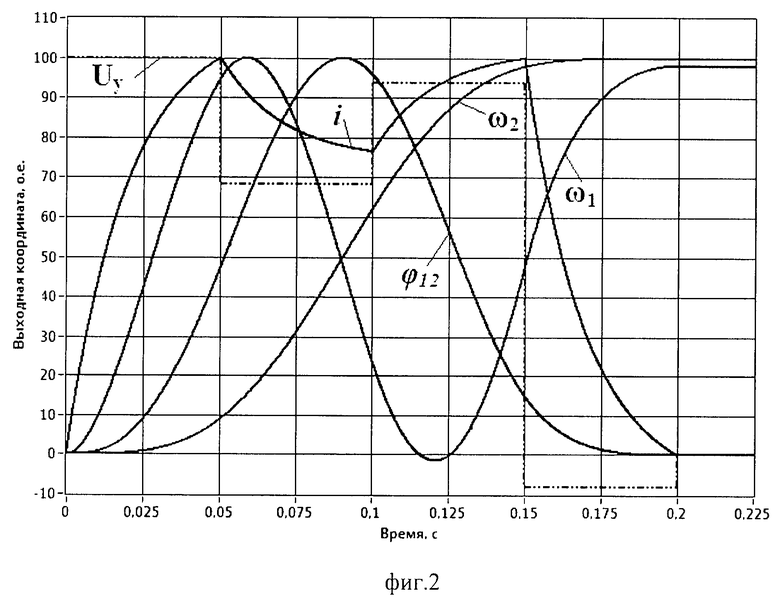
На фиг.2 приведены графики переходных процессов пяти координат системы электропривода при ступенчатом приращении заданной скорости.
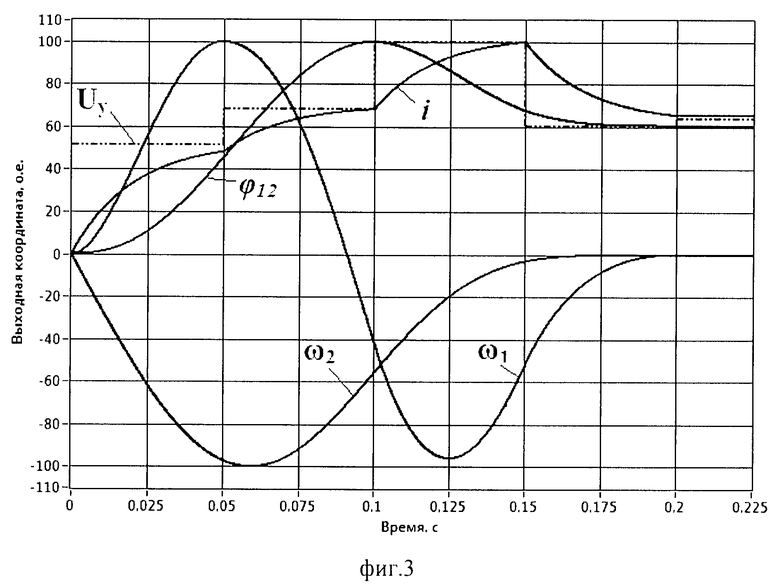
На фиг.3 приведены графики переходных процессов пяти координат системы электропривода при ступенчатом приращении нагрузки на валу РО в начальный момент времени.
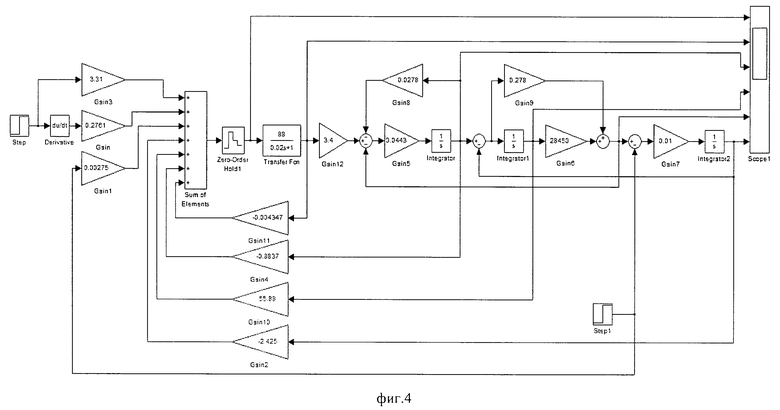
На фиг.4 приведена схема моделирования динамики системы регулирования скорости рабочего органа в пакете Matlab Simulink.
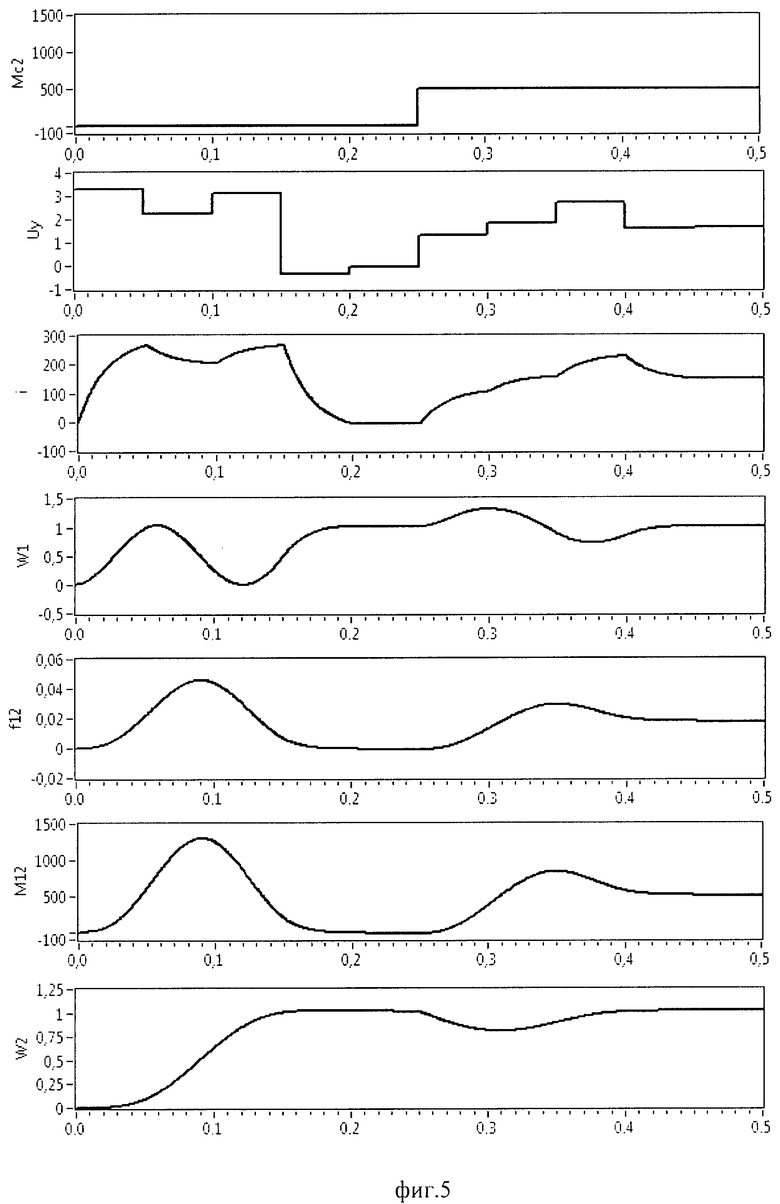
На фиг.5 приведены переходные процессы в системе электропривода при ступенчатых приращениях задания и нагрузки на валу электропривода.
Электропривод постоянного тока с упругими связями (фиг.1) содержит последовательно соединенные блок 1 задания скорости, регулятор 2 скорости, замкнутый контур 3 регулирования тока, электромеханическую часть 4 двигателя, рабочий орган 5 с упругими связями, а также датчик 6 скорости вала РО, датчик 7 упругого момента, датчик 8 скорости вала двигателя, датчик 9 тока якоря и датчик 10 статической нагрузки.
Датчик 7 упругого момента и датчик 10 статической нагрузки установлены на валу рабочего органа 5 механизма. Датчик 9 тока якоря входит в состав замкнутого контура 3 регулирования тока.
Регулятор 2 скорости включает дифференцирующее звено 11, подключенное к выходу блока 1 задания скорости, семь масштабирующих элементов 12-18 и последовательно соединенные суммирующий элемент 19 и интерполятор 20 нулевого порядка. Вход масштабирующего элемента 12 подключен к блоку 1 задания скорости, а выход - к суммирующему элементу 19. Вход масштабирующего элемента 13 подключен к дифференцирующему звену 11, а выход - к суммирующему элементу 19. Вход масштабирующего элемента 14 подключен к выходу датчика 10 статического статической нагрузки, а выход - к суммирующему элементу 19. Вход датчика 10 подключен к рабочему органу 5 с упругими связями. Вход масштабирующего элемента 15 подключен к выходу датчика 9 тока якоря, а выход - к суммирующему элементу 19. Вход датчика 9 подключен к выходу замкнутому контура 3 регулирования тока якоря. Вход масштабирующего элемента 16 подключен к выходу датчика 8 скорости вала двигателя, а выход - к суммирующему элементу 19. Вход датчика 8 подключен к выходу электромеханической части 4 двигателя. Вход масштабирующего элемента 17 подключен к выходу датчика 7 упругого момента, а выход - к суммирующему элементу 19. Вход датчика 7 подключен к рабочему органу 5 с упругими связями. Вход масштабирующего элемента 18 подключен к выходу датчика 6 скорости вала рабочего органа, а выход - к суммирующему элементу 19. Вход датчика 6 подключен к выходу рабочего органа 5 с упругими связями.
На чертежах приведены следующие обозначения:
Uy - дискретное управление;
ω2 - скорость вращения вала РО механизма, приведенная к валу двигателя;
φ12 - угол скручивания упругого вала, приведенный к валу двигателя;
ω1 - скорость вращения вала электродвигателя;
i - ток якоря;
ω2з - заданная скорость вращения вала РО;
ω'2з - производная заданной скорости вращения вала РО;
Мс2 - момент статической нагрузки.
Электропривод постоянного тока с упругими связями работает следующим образом.
Сигнал с блока 1 задания скорости поступает на регулятор 2 скорости, который формирует оптимальное управление Uy, поступающее на замкнутый контур 3 регулирования тока якоря, который воздействует на электромеханическую часть 4 двигателя и далее на рабочий орган 5 механизма, регулируя скорость его вращения. Напряжение управления Uy можно представить в виде линейной формы контролируемого вектора состояния электропривода (сигналы с датчиков 6-9), заданного значения выходной переменной (сигнал с блока 1) и ее производной (сигнал с дифференцирующего звена 11), а также статической нагрузки на валу исполнительного механизма (сигнал с датчика 10):

где Uy - дискретное управление;
К1 - масштабирующий коэффициент элемента 12;
ω2з - заданная скорость вращения вала РО;
К2 - масштабирующий коэффициент элемента 13;
ω'2з - производная заданной скорости вращения вала РО;
К3 - масштабирующий коэффициент элемента 14;
Мс2 - момент статической нагрузки;
К4 - масштабирующий коэффициент элемента 15;
i - ток якоря;
К5 - масштабирующий коэффициент элемента 16;
ω1 - скорость вращения вала электродвигателя;
К6 - масштабирующий коэффициент элемента 17;
φ12 - угол скручивания упругого вала, приведенный к валу двигателя;
К7 - масштабирующий коэффициент элемента 18;
ω2 _ скорость вращения вала РО механизма, приведенная к валу двигателя.
Проблема нахождения оптимальных значений коэффициентов K1 - К7 масштабирующих элементов 12-18 для конкретного электропривода с упругими связями решается известными методами синтеза систем предельного по быстродействию апериодического управления [1-2].
Управляющее воздействие формируется на выходе суммирующего элемента 19 и подвергается дискретизации по времени с постоянным тактом дискретизации в интерполяторе 20 нулевого порядка. Таким образом, на выходе регулятора 2 скорости формируется дискретное управление, оптимизирующее вращение вала РО на каждом такте дискретного управления электроприводом. Сам электропривод постоянного тока на фиг.1 представлен последовательно включенными замкнутым контуром 3 регулирования тока якоря, электромеханической частью 4 двигателя и рабочим органом 5 с упругими связями. Настройка внутреннего контура 3 регулирования тока якоря осуществляется, как правило, на технический оптимум и с достаточной для практических целей точностью, этот быстродействующий контур электропривода аппроксимируют апериодическим звеном 1-го порядка. Предлагаемый регулятор 2 скорости рабочего органа контролирует все состояние объекта управления, обеспечивая частичную инвариантность как по задающему, так и по возмущающему воздействиям и при надлежащем выборе значений коэффициентов передачи масштабирующих усилителей обеспечивает оптимальные переходные процессы в замкнутой по вектору состояния системе управления.
В качестве объекта апробации предлагаемой в изобретении системы электропривода рассмотрим силовую энергетическую установку с упругими связями по схеме «электропривод постоянного тока - рабочий орган с упругими связями».
Электропривод оборудован двигателем постоянного тока П131-6К. Его параметры: РH=180кВт, (UH=440В, IH=440А, nH=1100 об/мин, ФH=4,95·10-2 Вб, RЯ∑=0,04432 Ом. Обмоточные данные машины: 2р=4, 2а=4, WЯ=216. Данные привода, характеризующие механическую часть рабочего органа с упругими связями:
- момент инерции двигателя, J1=22,56 кг·м2;
- момент инерции каландра, J2=101,04 кг·м2;
- жесткость упругой механической связи c12=0,2845·105 Н·м/рад
- коэффициент вязкого трения, β1≈0,0278 Н·м·с/рад;
- коэффициент диссипации механической связи, β12≈0,278 Н·м·с/рад.
Определим оставшиеся параметры модели:
- передаточный коэффициент контура тока 
- постоянная времени контура тока Т≈0,02 с;
- передаточный коэффициент двигателя 
Объект управлениями оптимальное управление при этом представим в виде:
 ;
;

где X - вектор производных состояния,  ;
;
А - матрица состояния;
X - вектор состояния, ;
;
В - матрица управления;
U - вектор управления,  ;
;
С - матрица возмущения;
F - вектор возмущения, .
.
Оптимальное управление U(kT0) представлено в виде линейной формы дискретных значений вектора состояния Х(кТ0), задающих воздействий Х*(кТ0), вектора возмущения F(kT0) и вектора производных задающих воздействий системы Х*(кТ0). Матрицы A0,B0,C0,D0 - матрицы масштабирующих коэффициентов регулятора скорости, определение которые является задачей синтеза. Процедуры синтеза масштабирующих коэффициентов регулятора рассмотрены в [1-2].
Для рассматриваемого электропривода искомые матрицы A0,B0,C0,D0
определены в результате проведения процедуры синтеза для заданного такта дискретного управления T0. В частности, при такте
T0=0,05 с эти матрицы имеют вид:
A0=[а01 а02 а03 а04]=[-2,425 55,88 -0,8837 -0,004347]
В0=[b01]=3,308
С0=[c01]=0,0275
D0=[d01]=0,2761.
После нахождения масштабирующих коэффициентов регулятора, промоделировав полученную систему электропривода, получим графики переходных процессов при ступенчатом приращении заданной скорости (фиг.2) и ступенчатом приращении нагрузки на валу РО (фиг.З).
На фиг.4 приведена схема моделирования динамики системы регулирования скорости рабочего органа в пакете Matlab Simulink. В качестве тестовых воздействий на систему приняты ступенчатые воздействия, позволяющие оценить прямые оценки качества регулирования. Приращение задающего воздействия соответствует 1 рад/с (около 1% от номинальной скорости вращения электропривода) приложено на входе системы в момент времени t=0 с. Приращение возмущающего воздействия соответствует 500 Н·м (около 30% от номинального момента на валу электропривода). Приложено в момент времени t=0,25 с.
Результаты моделирования приведены на фиг.5. Графики отражают переходные процессы шести координат электропривода (сверху вниз):
- приращение возмущающего воздействия (Н·м);
- дискретное управление (В);
- ток якоря (А);
- скорость вращения вала электродвигателя (рад/с);
- угол скручивания упругого вала, приведенный к валу двигателя (рад);
- крутильный момент, приведенный к валу двигателя (Н·м);
- скорость вращения вала рабочего органа, приведенная к валу двигателя (рад/с).
Как видно из графиков (фиг.2, фиг.3, фиг.5):
1. Переходные процессы в замкнутом контуре регулирования скорости электропривода как по задающему, так и по возмущающему воздействию являются оптимальными по быстродействию и заканчиваются за 4 такта дискретного управления. При такте управления, равном 0,05 с, время переходных процессов составляет 0,2 с.
2. При ступенчатом приращении заданной скорости отработка задания осуществляется плавно без перерегулирования скорости. При этом демпфирование упругих колебаний осуществляется преимущественно электродвигателем секции, а не за счет диссипации энергии упругодиссипативной механической связи.
3. При ступенчатом приращении нагрузки на валу рабочего органа (ситуация в теоретическом плане критическая) на 30% динамический провал скорости не превышает 0,2 рад/с, что составляет менее 0,2% номинальной скорости вращения электродвигателя (115 рад/с). Статическая ошибка теоретически равна нулю.
4. Переход на другую скорость может осуществляться с применением задатчика интенсивности первого или второго рода с целью сохранения линейного режима функционирования системы, для которого гарантируется устойчивость и оптимальное движение по критерию быстродействия.
5. Уменьшение такта дискретного управления позволит повысить быстродействие контура регулирования скорости и снижение динамической ошибки при изменении нагрузки на валу машины, но приведет к сужению зоны малых отклонений координат (линейности модели) и, соответственно, вероятности насыщения координат электропривода (прежде всего координаты управления). Это приведет к ухудшению качества и скорее всего нарушению устойчивой работы системы. Отсюда - выбор такта управления - самостоятельная задача, связанная с ограничениями энергии управления.
Таким образом, предлагаемое изобретение позволяет обеспечить наибольшее быстродействие и минимум динамической погрешности отработки как задающих, так и возмущающих воздействий в электроприводе с упругими связями.
Источники информации
1. Ту Ю. Современная теория управления: Пер. с англ. / Под ред. В. В. Солодовникова. - М.: Машиностроение, 1971. -472 с.
2. Казанцев В.П., Петренко В.И. Синтез дискретных систем управления линейными объектами произвольного порядка // Информационные управляющие системы / Перм. гос.техн. ун-т. Пермь, 1995, с.99 - 105.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1985 |
|
SU1410264A1 |
| Электропривод постоянного тока по системе генератор-двигатель с упругим звеном и способ для его управления | 1987 |
|
SU1723649A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТОМ С УПРУГИМИ СВЯЗЯМИ | 2011 |
|
RU2489797C1 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
| Устройство для регулирования скорости многомассового упругого механизма | 1980 |
|
SU900265A1 |
| Устройство для ограничения динамических усилий в механизме экскаватора | 1987 |
|
SU1509488A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
Изобретение относится к области электротехники и может быть использовано в системе управления электроприводами. Техническим результатом является повышение быстродействия и уменьшение динамической погрешности при регулировании скорости рабочего органа в электромеханической системе с упругими связями. Электропривод содержит последовательно соединенные блок задания скорости, регулятор скорости, замкнутый контур регулирования тока с датчиком тока якоря, электромеханическую часть двигателя, рабочий орган с упругими связями, а также датчик скорости вала рабочего органа, датчик скорости вала двигателя, датчик упругого момента и датчик статической нагрузки. Регулятор скорости включает дифференцирующее звено, семь масштабирующих элементов, суммирующий элемент и интерполятор нулевого порядка. Первый масштабирующий элемент подключен к блоку задания скорости, второй масштабирующего элемента - к дифференцирующему звену, третий масштабирующий элемент - к выходу датчика статической нагрузки, четвертый масштабирующий элемент - к выходу датчика тока якоря, вход которого подключен к выходу замкнутого контура регулирования ток. Пятый масштабирующий элемент подключен к выходу датчика скорости вала двигателя, шестой масштабирующий элемент - к выходу датчика упругого момента, а седьмой масштабирующий элемент - к выходу датчика скорости вала рабочего органа. Масштабирующие элементы подключены к входам суммирующего элемента. 5 ил. 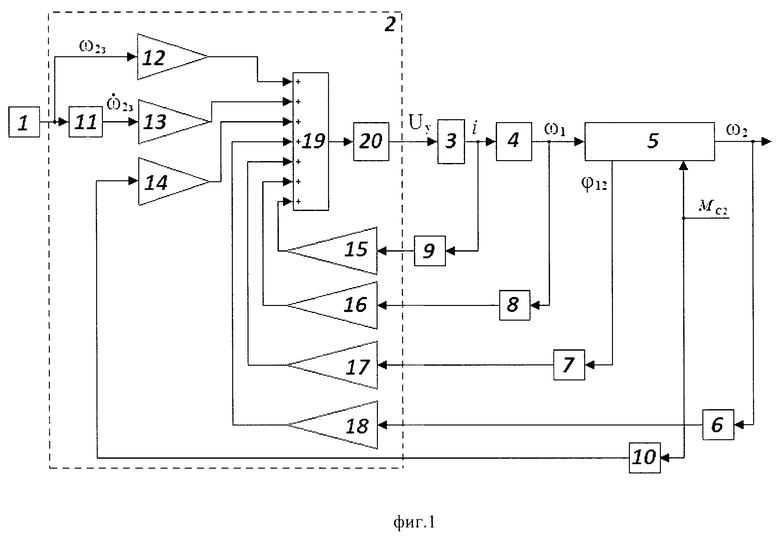
Электропривод постоянного тока с упругими связями, содержащий последовательно соединенные блок задания скорости, регулятор скорости, замкнутый контур регулирования тока с датчиком тока якоря, электромеханическую часть двигателя, рабочий орган с упругими связями, а также датчик скорости вала рабочего органа, датчик скорости вала двигателя и датчик упругого момента, установленный на валу рабочего органа, отличающийся тем, что на валу рабочего органа механизма дополнительно установлен датчик статической нагрузки, а регулятор скорости включает дифференцирующее звено, подключенное к выходу блока задания скорости, семь масштабирующих элементов и последовательно соединенные суммирующий элемент и интерполятор нулевого порядка, при этом вход первого масштабирующего элемента подключен к выходу блока задания скорости, вход второго масштабирующего элемента подключен к дифференцирующему звену, вход третьего масштабирующего элемента подключен к выходу датчика статической нагрузки, вход четвертого масштабирующего элемента подключен к выходу датчика тока якоря, вход которого подключен к выходу замкнутого контура регулирования тока, вход пятого масштабирующего элемента подключен к выходу датчика скорости вала двигателя, вход шестого масштабирующего элемента подключен к выходу датчика упругого момента, вход седьмого масштабирующего элемента подключен к выходу датчика скорости вала рабочего органа, выходы всех масштабирующих элементов подключены к входам суммирующего элемента.
| RU 2011151201 A, 14.12.2011 | |||
| Устройство для дуговой сварки на переменном токе | 1966 |
|
SU209604A1 |
| Электропривод постоянного тока с упругой механической связью между электродвигателем и механизмом | 1985 |
|
SU1325654A1 |
| Система автоматического управления электроприводом лебедки буровой установки | 1988 |
|
SU1566012A1 |
| US 20060108962 A1, 25/05.2006 | |||
| US 7049781, 23.06.2006 | |||
| УСТАНОВКА ДЛЯ ОЧИСТКИ СТОЧНЫХ ВОД ОТ ЗАГРЯЗНЕНИЙ | 2011 |
|
RU2472715C1 |
| WO 1993919949 A1, 14.10.1993 | |||

