Изобретение относится к электротехнике, а именно автоматизированному электроприводу оптимального по быстродействию с низкой чувствительностью, к изменению его параметров.
Известен электропривод постоянного тока, содержащий двигатель с датчиком скорости, последовательно соединенные блок задания, регулятор скорости, задатчик интенсивности ток якоря, регулятор тока, преобразователь, выход которого подключен к двигателю, инверсный вход регулятора тока соединен.с датчиком тока, а инверсный вход регулятора скорости с датчиком скорости Cl7Недостатком известного устройства является невозможность обеспечить оптимальные динамические показатели при достаточно широком диапазоне изменения параметров электропривода и, в частности, момента инерции.
Наиболее близким по технической сущности к предлагаемому является электропривод постоянного TOKS, содержащий двигатель с датчиком скорости, последовательно соединенные блок задания, блок сравнения, регулятор скорости, задатчик интенсивности тока якоря, регулятор тока, преобразователь, выход которого подключен к двигателю, инверсный вход регулятора тока соединен с датчиком тока, инверсный вход блока сравнения соединен с датчиком скорости, задатчик интенсивности тока якоря содержит последовательно соединенные усилитель и интегратор, в обратной связл которого включен ограничитель.
Электропривод позволяет, обеспечит оптимальные переходные процессы в достаточно широкомдиапазоне изменения параметров якорной цепи двигателя, поскольку ток якоря двигателя можно сформировать сколь угодно м.ало отличающимся (речь идет о средних значениях якорного тока) .от заданного тока, динамическая характеристика которого не зависит от параметров электропривода, а определяется лишь величиной максимально допустимой производной тока якоря и максимально допустимой величиной тока якоря 23,
Однако изменение момента инериии электропривода может привести к существенному ухудшению показателей качества регулирования, поскольку параметры пропорциональной и интегральной составляющей отклонения скорости от заданного значения расчитываются для конкретного значения мЬмента инерции привода (параметры пи-регулятора скорости зависят от величины момента инерции электропривода).
о Кроме того, применение ПИ-закона регулирования требует введения задатчика интенсивности скорости, если сигнал задания скорости может
принимать ступенчатые приращения, что значительно затягивает переходные процессы по заданию скоро.сти двигателя.
Цель изобретения - повьаиение качества регулирования скорости.
Поставленная цель достигается тем что вэлектропривод постоянного тока, содержащий двигатель с датчиком скорости, последовательно соединенные блок задания, блок сравнения, регулятор скорости, задатчик интенсивности тока якоря, регулятор тока, преобразователь, выход которого подключен к двигателю, инверсный вход регулятора тока соединен с датчиком тока, инверсный вход блока сравнения соединен с датчиком скорости, задатчик интенсивности тока якоря содержит последовательно соединенные усилитель и..интегратор, в обратную связь которого включен ограничитель, дополнительно введен датчик режима ограничения,, а регул ятор скорости со держит последовательно соединенные дифференцирукхцее звено, первый нульорган, схему ИЛИ, амплитудный детектор, первый узел сравнения, второй узел сравнения, а также блок выборки-хранения, масштабный усилитель,
второй нуль-оргдн, при этом вьЗход масштабного усилителя соединен с входами второго узла сравнения, блока выборки-хранения, амплитудного детектора и второго нуль-органа выход которого соединен с вторым входом схемы ИЛИ, инверсный вход первого узла сравнения соединен с выходом блока выборки-хранения, второй вход которого через датчик режима ограничения соединен с вторым выходом ограничителя, вход масштабного усилителя соединен с выхойом блока сравнения, вход дифференцирующего звена соединен с выходом датчика скорости, а выход второго узла сравнения соединен с входом усилителя.
На фиг.1 представлена схема электропривода; на фиг.2-4 - диаграммы, поясняющие работу электропривода.
Электропривод постоянного тока содержит (фиг.1) двигатель 1 с датчиком 2 скорости, последовательно соединенные блок 3 задания, 0лок 4 сравнения, регулятор 5 скорости, задатчик 6 интенсивности тОка якоря, регулятор 7 тока, преобразователь 8, выход которого подключен к двигателю 1, инверсный вход регулятора 7 тока соединен с датчиком 9 тока, инверсный вход блока 4 сравнения соединен с датчиком 2 скорости, задатчик б интенсивности тока якоря содержит последовательно соединенные усилител 10 и интегратор 11, в об.ратной связи которого включен ограничитель 12, датчик 13 режима ограничения. Регулятор 5 скорости содержит последовательно соединенные дифференцирующее,.
звено 14,первый нуль-орган 15., схему ИЛИ 1б, амплитудный детектор 17, первый узел 18 сравнения, второй узел 19 сравнения, а также блок 20 выборки-хранения, масштабный усилитель 21, второй нуль-орган 22, при этом выход масштабного усилителя 21 соединен с входами второго узла 19 сравнения, блока 20 выборки-хранения амплитудного детектора 17 и второго нуль-органа 22, выход которого соединен с вторым вхрдом схемы ИЛИ 16, инверсный.вход первого узла 18 сравнения соединен с выходом блока 20 выборки-хранения, второй вход которого через датчик 13 режима ограничения соединен с вторым выходом ограничителя 12, вход масштабного усилителя 21 соединен с выходом блока сравнения, вход дифференцирующего звема 14 соединен с выходом датчика 2 скорости, а выход второго, узла 19 сравнения соединен с входом усилителя 10. Датчик 19 режима ограничения может быть выполнен по принципу измерения тока в ограничителе 12 интегратора 11.
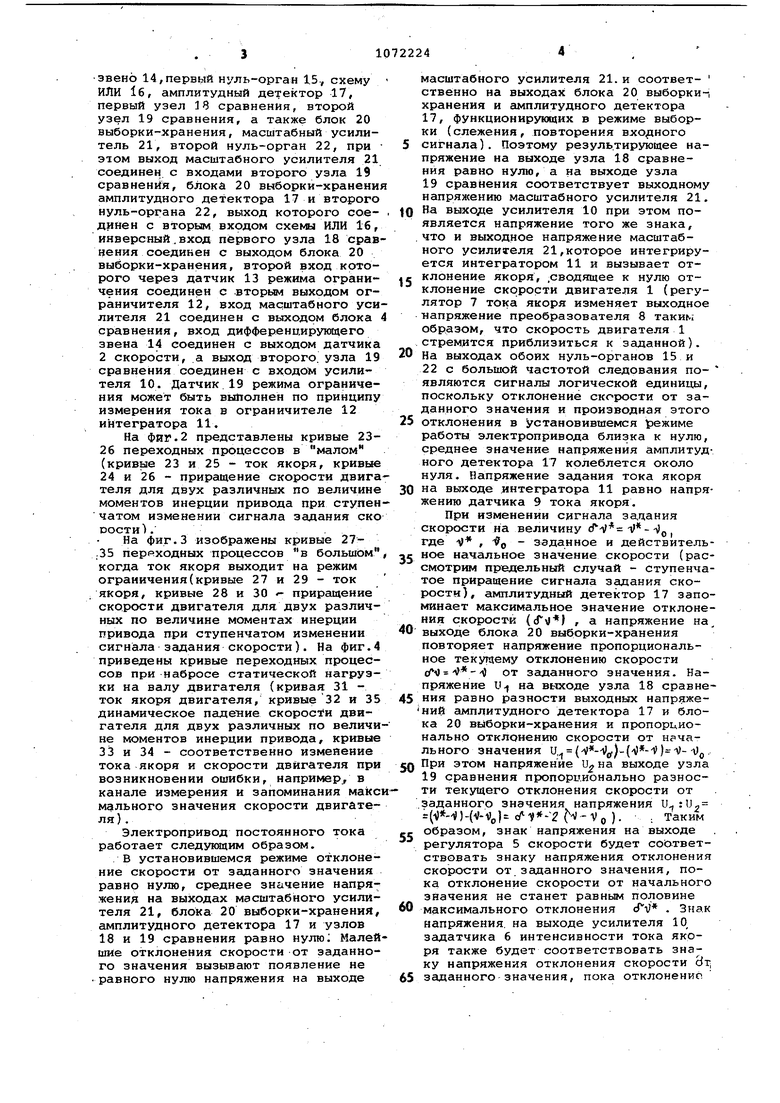
На Фиг.2 представлены кривые 2326 переходных процессов в малом (кривые 23 и 25 - ток якоря, кривые 24 и 26 - приращение скорости двигателя для двух различных по величине моментов инерции привода при ступенчатом изменении сигнала задания ско
рости)..
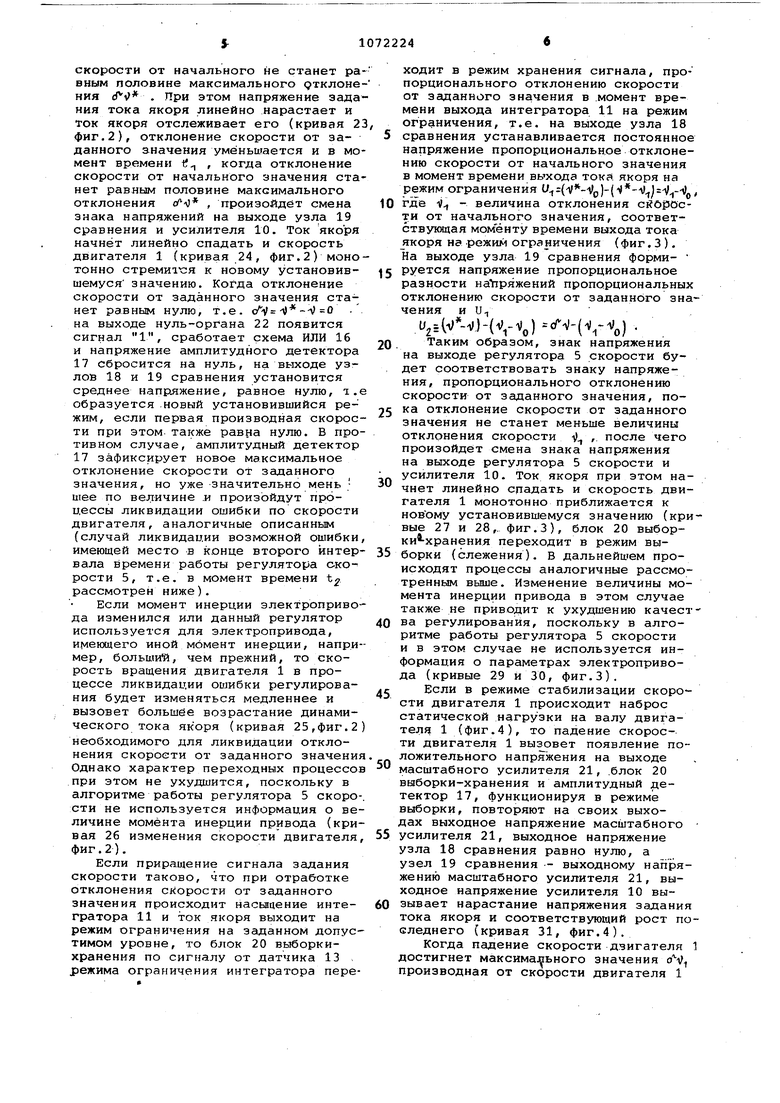
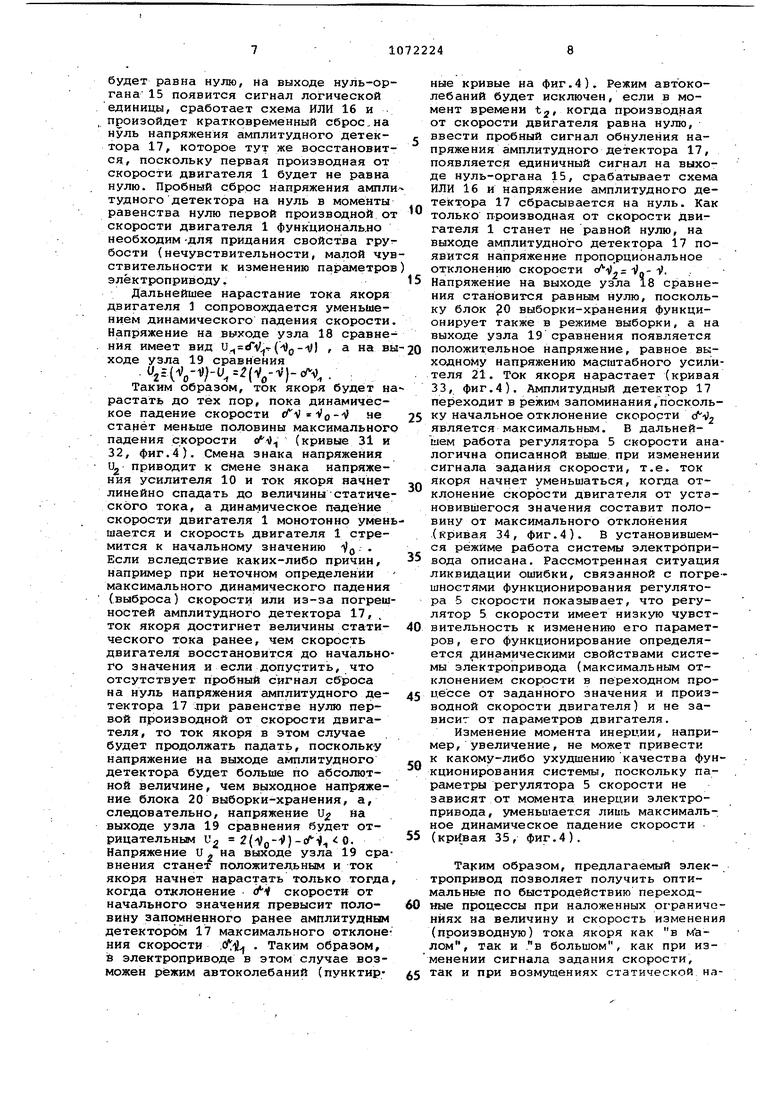
На фиг.З изображены кривые 27.35 переходных процессов в большом когда ток якоря выходит на режим ограничения(кривые 27 и 29 - ток якоря, кривые 28 и 30 - приращение скорости двигателя для двух различных по величине моментах инерции привода при ступенчатом изменении сигнала задания скорости). На фиг.4 приведены кривые переходных процессов при .набросе статической нагрузки на валу двигателя (кривая 31 ток якоря двигателя, кривые 32 и 35 динамическое падение скорости двигателя для двух различных по величине моментов инерции привода, кривые 33 и 34 - соответственно изменение тока якоря и скорости двигателя при возникновении ошибки, например в канале измерения и запоминания максмдльного значения скорости двигателя) .
Электропривод постоянного тока работает следующим образом.
.В установившемся режиме отклонение скорости от заданного значения равно нулю, среднее значение напря7 жения на выходах масштабного усилителя 21, блока 20 выборки-хранения, амплитудного детектора 17 и узлов 18 и 19 сравнения равно нулю; Малейшие отклонения скорости от заданного значения вызывают появление не .равного нулю напряжения на выходе
масштабного усилителя 21. и соответственно на выходах блока 20 выборки-, хранения и гилплитудного детектора 17, функционирующих в режиме выборки (слежения, повторения входного
сигнала). Поэтому результирующее напряжение на выходе узла 18 сравнения равно нулю, а на выходе узла 19 сравнения соответствует выходному напряжению масштабного усилителя 21.
Q На выходе усилителя 10 при этом появляется напряжение того же знака, .что и выходное напряжение масштабного усилителя 21,которое интегрируется интегратором 11 и вызывает отс клонение якоря, .сводящее к нулю отклонение скорости двигателя 1 (регулятор 7 тока якоря изменяет выходное напряжение преобразователя 8 такиы образом, что скорость двигателя 1 стремится приблизиться к заданной).
0 На выходах обоих нуль-органов 15 и 22 с большой частотой следования по- являются сигналы логической единицы, поскольку отклонение скорости от заданного значения и производная этого
5 отклонения в установившемся )ежиме работы электропривода близка к нулю, среднее значение напряжения амплитудного детектора 17 колеблется около нуля. Напряжение задания тока якоря
0 на вьтходе интегратора 11 равно напряжению датчика 9 тока якоря.
При изменении сигнала за,цания скорости на величину сС , где V , 0 заданное и действитель5 ное начальное значение скорости (рассмотрим предельный случай - ступенчатое приращение сигнала задания скорости), амплитудный детектор 17 запоминает максимальное значение отклонения скорости ((Гх)) , а напряжение на
0 выходе блока 20 выборки-хранения повторяет напряжение пропорциональное текущему отклонению скорости сЛ0 от заданного значения. Напряжение 1Ц на выходе узла 18 сравне5 ния равно разности выходных напряжений амплитудного детектора 17 и блока 20 выборки-хранения и пропорционально отклонению скорости от начального значения и, ())-(л)-#)-л),.
Q При этом напряжение и на выходе узла 19 сравнения пропорционально разности текущего отклонения скорости от заданного значения напряжения (l)-l))-(V-Vo)r AI-VO ). , таким образом, знак напряжения на выходе
5 регулятора 5 скорости будет соответствовать знаку напряжения отклонения скорости от.заданного значения, пока отклонение скорости от начального значения не станет равным половине
0 максимального отклонения (fi . Знак напряжения, на выходе усилителя 10, Зсщатчика 6 интенсивности тока якоря также будет соответствовать знаку напряжения отклонения скорости dxi
5 заданного значения, пока отклонение.
скорости от начального не станет равным половине максимального ртклонения cO . При этом напряжение задания тока якоря линейно нарастает и ток якоря отслеживает его (кривая 23 фиг.2), отклонение скорости от заданного значения уменьшается и в момент времени if , когда отклонение скорости от начального значения станет равным половине максимального отклонения , произойдёт смена знака напряжений на выходе узла 19 сравнения и усилителя 10. Ток якоря начнёт линейно спадать и скорость двигателя 1 (кривая 24, фиг.2) монотонно стреми1х:я к новому установившемуся значению. Когда отклонение скорости от заданного значения станет равным нулю, т.е. на выходе нуль-органа 22 появится сигнал 1, сработает схема ИЛИ 16 и напряжение амплитудного детектора 17 сбросится на нуль, на выходе узлов 18 и 19 сравнения установится среднее напряжение, равное нулю, т.е образуется .новый установившийся режим, если первая производная скорости при этом также равна нулю. В противном случае, амплитудный детектор 17 зафиксирует новое максимальное отклонение скорости от заданного значения, но уже значительно мень шее по величине .и произойдут процессы ликвидации ошибки по скорости двигателя, аналогичные описанным (случай ликвидации возможной ошибки, имеющей место в конце второго интервала времени работы регулятора скорости 5, т.е. в момент времени t рассмотрен ниже).
Если момент инерции электропривода изменился или данный регулятор используется для электропривода, имеющего иной момент инерции, например, больший, чем прежний, то скорость вращения двигателя 1 в процессе ликвидации ошибки регулирования будет изменяться медленнее и вызовет большее возрастание динамического тока якоря (кривая 25,фиг.2 необходимого для ликвидации отклонения скорости от заданного значения Однако характер переходных процессов при этом не ухудшится, поскольку в алгоритме работы регулятора 5 скорости не используется информация о величине момента инерции привода (кривая 26 изменения скорости двигателя, фиг.2).
Если приращение сигнала задания скорости таково, что при отработке отклонения скорости от заданного значения происходит насьицение интегратора 11 и ток якоря выходит на режим ограничения на заданном допустимом уровне, то блок 20 выборкихранения по сигналу от датчика 13 режима ограничения интегратора переходит в режим хранения сигнала, пропорционального отклонению скорости от заданного значения в момент времени выхода интегратора 11 на режим ограничения, т.е. на выходе узла 18 сравнения устанавливается постоянное напряжение пропорциональное отклонению скорости от начального значения в момент времени выхода токи якоря на режим ограничения t-r()-(-V))5 V-, - величина отклонения cROpOcти от начального значения, соответствующая мо1ленту времени выхода тока якоря на .режим ограничения (фиг.З). lla выходе узла 19 сравнения форми- руется напряжение пропорциональное разности наУгряжений пропорциональных отклонению скорости от заданного значения и и,
)-{,) гл;-(о)
Таким образом, знак напряжения на выходе регулятора 5 скорости будет соответствовать знаку напряжения, пропорционального отклонению скорости от заданного значения, пока отклонение скорости от заданного значения не станет меньше величины отклонения скорости V ,. после чего произойдёт смена знака напряжения на выходе регулятора 5 скорости и усилителя 10. Ток якоря при этом начнет линейно спадать и скорость двигателя 1 монотонно приближается к новому установившемуся значению (кривые 27 и 28,. фиг.З), блок 20 выборки -хранения переходит в режим выборки (слежения). В дальнейшем происходят процессы аналогичные рассмотренным выше. Изменение величины момента инерции привода в этом случае также не приводит к ухудшению качества регулирования, поскольку в алгоритме работы регулятора 5 скорости и в этом случае не используется информация о параметрах электропривода (кривые 29 и 3 О, фиг.3).
Если в режиме стабилизации скорости двигателя 1 происходит наброс статической нагрузки на валу двигателя 1 (фиг.4), то падение скорости двигателя 1 вызовет появление положительного напряжения на выходе масштабного усилителя 21, .блок 20 выборки-хранения и амплитудный ;цетектор 17, функционируя в режиме выборки, повторяют на своих выходах выходное напряжение масштабного усилителя 21, выходное напряжение узла 18 сравнения равно нулю, а узел 19 сравнения - выходному напряжению масштабного усилителя 21, выходное напряжение усилителя 10 вызывает нарастание напряжения задания тока якоря и соответствующий рост последнего (кривая 31, фиг.4).
Когда падение скорости двигателя достигнет максимального значения производная от скорости двигателя 1
будет равна нулю, на выходе нуль-органа 15 появится сигнал логической единицы, сработает схема ИЛИ 16 и произойдет кратковременный сброс,на нуль напряжения амплитудного детектора 17, которое тут же восстановится, поскольку первая производная от скорости двигателя 1 будет не равна нулю. Пробный сброс напряжения ампли тудного детектора на нуль в моменты равенства нулю первой производной от скорости двигателя 1 функцирналь.но необходим -для придания свойства грутбости (нечувствительности, малой чувствительности к изменению параметров электроприводу.
Дальнейшее нарастание тока якоря двигателя J сопровождается уменьшением динамического падения скорости. Напряжение на выходе узла 18 сравнения имеет вид u,,«fV() , а на выходе узла 19 сравнения
.()-°.
Таким образом, ток якоря будет нарастать до тех пор, пока динамическое падение скорости ( не станет меньше половины максимального падения скорости cf (кривые 31 и 32, фиг.4). Смеца знака напряжения приводит к смене знака напряжения усилителя 10 и ток якоря начнет линейно спадать до величины статического тока, а динамическое падение скорости двигателя 1 монотонно уменьшается и скорость двигателя 1 стремится к начальному значению о Если вследствие каких-либо причин, например при неточном определении максимального динамического падения (выброса) скорости или из-за погрешностей амплитудного детектора 17, ток якоря достигнет величины статического тока ранее, чем скорость двигателя восстановится до начального значения и если допустить, что отсутствует пробный сигнал сброса на нуль напряжения амплитудного детектора 17 лри равенстве нулю первой производной от скорости двигателя, то ток якоря в этом случае будет продолжать падать, поскольку напряжение на выходе амплитудного детектора будет больше по абсолютной величине, чем выходное напряжение блока 20 выборки-хранения, а, следовательно, напряжение И на выходе узла 19 сравнения будет отрицательньм U 2{ д- }-tfi 0. Напряжение и на выходе узла 19 сравнения станет положительным и ток якоря начнет нарастать только тогда, когда отклонение скорости от начального значения превысит половину запомненного ранее амплитудным детектором 17 максимального отклонения скорости -Cf. . Таким образом, и электроприводе в этом случае возможен режим автоколебаний (пунктирные кривые на фиг.4). Режим автоколебаний будет исключен, если в момент времени t, когда производная от скорости двигателя равна нулю, ввести пробный сигнал обнуления напряжения амплитудного детектора 17, появляется единичный сигнал на выходе нуль-органа 15, срабатывает схема ИЛИ 16 и напряжение амплитудного детектора 17 сбрасывается на нуль. Как
0 только производная от скорости двигателя 1 станет не равной нулю, на выходе амплитудного детектора 17 появится напряжение пропорциональное отклонению скорости o V2 tQ-V,
5 Напряжение на выходе узла 18 сравнения становится равным нулю, поскольку блок 0 выборки-хранения функционирует также в режиме выборки, а на выходе узла 19 сравнения появляется
0 положительное напряжение, равное выходному напряжению масштабного усилителя 21. Ток якоря нарастает (кривая 33, фиг.4). Амплитудный детектор 17 переходит в режим запоминания, поскольку начальное отклонение скорости (/i)
5 является максимальным. В дальнейшем работа регулятора 5 скорости аналогична описанной выше при изменении сигнала задания скорости, т.е. ток якоря начнет уменьшаться, когда от0клонение скорости двигателя от установившегося значения составит половину от максимального отклонения .(кривая 34 , фиг. 4 ). В установившемся режиме работа системы электропри5вода описана. Рассмотренная ситуация ликвидации ошибки, связанной с погрешностями функционирования регулятора 5 скорости показывает, что регулятор 5 скорости имеет низкую чувст0вительность к изменению его параметров, его функционирование определяется 1инагмическими свойствами системы электропривода (максимальным отклонением скорости в переходном процессе от заданного значения и произ5водной скорости двигателя) и не зависит от параметров двигателя.
Изменение момента инерции, например, увеличение, не может привести к какому-либо ухудшению качества фун0кционирования системы, поскольку параметры регулятора 5 скорости не зависят от момента инерции электропривода, уменьшается лишь максимальное динамическое падение скорости
5 (кривая 35, фиг.4).
Таким образом, предлагаемый электропривод позволяет получить оптимальные по быстродействию переход0ные процессы при наложенных ограничениях на величину и скорость изменения (производную) тока якоря как в малом, так и в большом, как при изменении сигнала задания скорости, так и при возмущениях статической на5
ррузки на валу привода, а .также обеспечивает эффективное подавление возмущения статической нагрузки на валу привода (примерно в 4 раза уменьшает дин;амический провал скорости при набросё номинальной статической нагрузки).
Кроме того, электропривод обладает инвариантностью к изменению его момента инерции.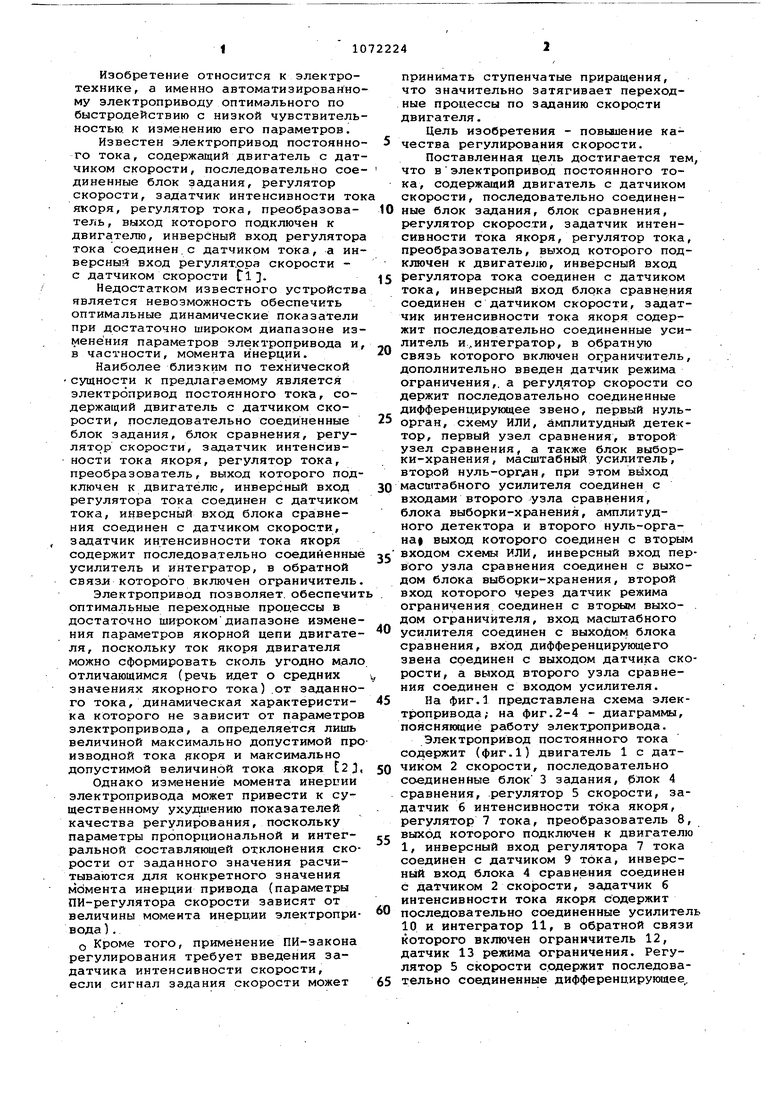

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1185517A2 |
| Электропривод постоянного тока | 1984 |
|
SU1179508A1 |
| Электропривод постоянного тока | 1984 |
|
SU1159141A1 |
| Способ астатического регулирования скорости двигателя постоянного тока | 1982 |
|
SU1067581A1 |
| Электропривод постоянного тока | 1986 |
|
SU1399878A1 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Устройство для разделения режимов управления электродвигателем постоянного тока | 1987 |
|
SU1578797A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА, содержащий двигатель с датчиком скорости, последовательно соединенные блок задания., блок сра внения, регулятор скорости, задатчик интенсивности тока якоря, регу лятор тока, преобразователь, выход которого подключен к двигателю, инверсный вход регулятора тока сое динен с датчиком тока,- инверсный вход блока сравнения соединен с да чиком скорости, задатчик интенсивности тока якоря содержит последов тельно соединенные усилитель и интегратор, в обратную связь которог включен ограничитель, о т л и ч а ю щ и и с я тем, что, с целью повышения качества регулирования скорости, в него дополнительно введен датчик режима ограничения, а регулятор скорости содержит последовательно соединенные дифференцирующее звено, первый нуль-орган, схему ИЛИ, амплитудный детектор, первый узел сравнения, второй узел сравнения, а также блок выборки-хранения,масштабный усилитель, второй нуль-орган, при этом выход масшт.абного усилителя соединен с входами второго узла сравнения, блока выборки-хранения, амплитудного детектора и второго нуль-органа, выход которого соединен с вторым вхбдом схемы ИЛИ, инверсный вход первого узла сравнения соединен с выходом блока выборки-хранения, второй вход которого через датчик режима ограничения соедине с вторым выходом ограничителя, вход масштабного усилителя соединен с выходом блока сравнения, вход дифференцирующего звена соединен с выходом датчика скорости, а выход второго узла сравнения соединен с входом усилителя.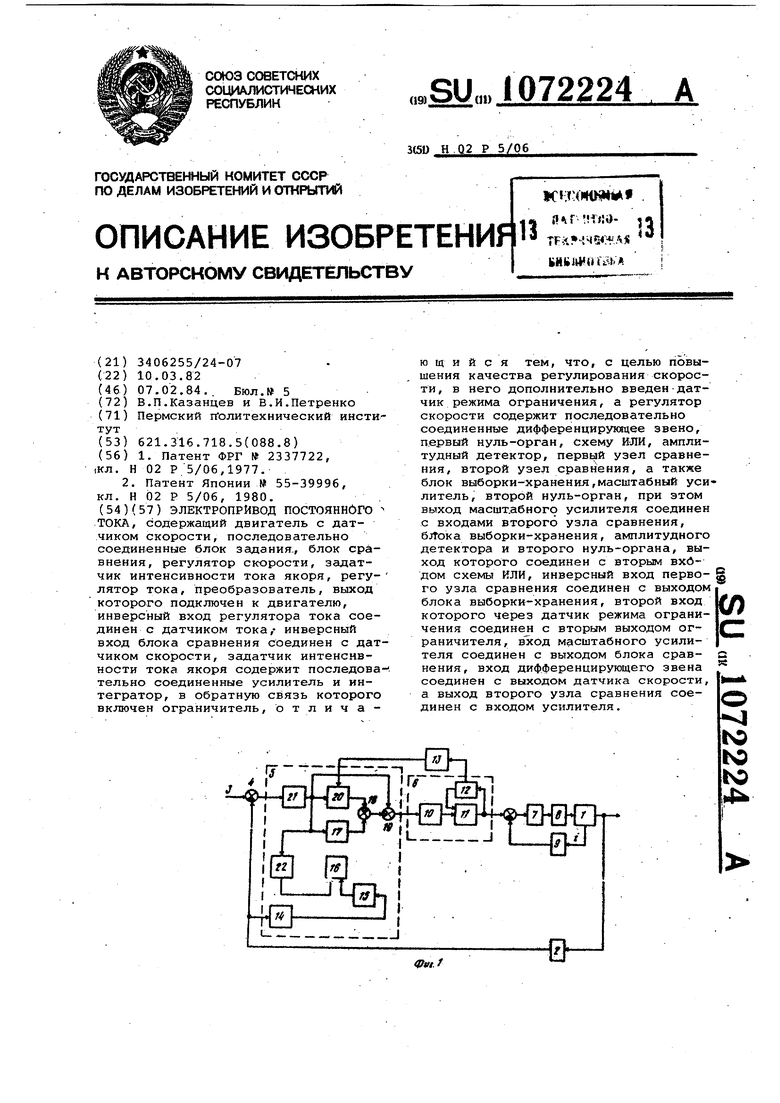
6Г
23
О .
fr t Фиг.2
t, if фш.З
/
JJ .
Фт.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ЗАБОРА ОТДЕЛЯЕМОГО ИЗ ПОСЛЕОПЕРАЦИОННОЙ РАНЫ | 2007 |
|
RU2337722C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
