ния по осям X н у и приводом изменения диаметра диафрагмы, причем диафрагма механически связана с датчикаин линейных перемещений по осям X и У и датчиком минимального размера диафрагмы, источник питания соединен через первый вентиль с шаговым двигателем линейного перемеще НИН по оси X, через второй вентиль с шаговым двигателем линейного пере мещенйя по оси У, через третий вентиль - с приводом изменения диамет8
ра диафрагмы, первая схема деления через первый компаратор соединена с первым вентилем, вторая схема деления через второй компаратор соединена с вторым вентилем, первый и второй компараторы соединены с датчиками линейного перемещения по осям X и У соответственно, а выходы первой и второй схем деления через первый и
второй аналоговыйключи соответственно, соединены сдатчиком минимального размера диафрагмыи третимвентилем.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат центра яркости исследуемого объекта | 1984 |
|
SU1245961A2 |
| Устройство для определения координат центра яркости следа дефекта детали | 1985 |
|
SU1280506A1 |
| Способ определения координат центров яркости дефектов детали | 1986 |
|
SU1379706A1 |
| Устройство для контроля полупроводниковой структуры | 1987 |
|
SU1422001A1 |
| Устройство для управления положением исполнительных элементов | 1982 |
|
SU1045222A1 |
| Устройство для считывания гра-фичЕСКОй иНфОРМАции | 1976 |
|
SU798907A1 |
| Устройство для управления положением исполнительных элементов | 1983 |
|
SU1226413A2 |
| Цифровой регистратор углового смещения света в атмосфере | 1983 |
|
SU1078289A1 |
| Оптико-электронное автоколлимационное устройство для измерения профиля полированных поверхностей | 1989 |
|
SU1686305A1 |
| Бесконтактный интерференционный профилограф | 1986 |
|
SU1384950A1 |
1. Способ определения координат центра яркости дефектов детали, включающий освещение детали, диафрагмирование отраженного светового потока, его модуляцию по монотонной зависимости и регистрацию фотоприемниками, формирование фотоэлектрических сигналов по двум координатным каналам и опорного сигнала, пропорционального яркости поля анализа, определение текущих значений координат центра яркости дефектов детали по соотношению фотоэлектричес ких сигналов и опорного сигнала, о т личающийся тем,, что, с целью улучшения точности анализа и сокращение времени анализа, дополнительно измеряют координаты центра диафрагмы, вырабатывают разностный сигнал, пропорциональный разности координат центра диафрагмы и текущего значе)1ия координат центра яркости дефектов детали, перемещают диафрагму по координатным осям до компенсации разностного сигнала и одновременно уменьшают диаметр диафрагмы, .а окончательное значение координат центра яркости дефектов детали определяют после достижения наперед заданного минимального размера диафрагмы. 2. Устройство для определения координат центра яркости дефектов детали, содержащее оптически связанные и последовательно установленные объектив, светоделительный кубик, (Л нейтральную пластинку, первый фотоприемник, а также диафрагму, .установленную в плоскости изображения объектива, оптически связанные со светоделительным кубиком последовательно установленные оптический клин, второй фотоприемник со схемой деления, оптически связанные со светоделительным кубиком последовательно установленные второй оптический клин и третий фотоприемник с второй схемой деления, причем первый фотоприемник связан с первой и второй cxeмa ш деления, отличающееся тем, что с целью улучшения точности анализа и сокращения времени анализа, устройство дополнительно содержит датчики линейных перемещений по осям X и У, датчик №1нимального размера диафрагмы, источник питаНИН,первый, второй и третий вентили, первый и второй аналоговые ключи, первый и второй компараторы, диафрагма снабжена шаговыми двигателями линейного перемеще
1
Изобретение относится к контрольно-измерительной технике и может быть использовано при автоматизации визуального метода дефектоскопии, в составе люминесцентного, цветноrOj магнитопорошкового и оптического способов.
Цель изобретения - улучшение точности анализа и сокращение его вре,мени.
На фиг. 1 представлена структурная схема устройства, реализующего предлагаемый способ; на фиг. 2 диаграмма последовательности операций определения координат центра яркости наиболее яркого дефекта детали.
Устройство для определения координат центра яркости дефектов детали 1 состоит из оптически связанных объектива 2, диафрагмы 3, светоделйтельного кубика 4, расположенных на одной оптической оси. Светоделнтельный кубик 4 оптически С-вязан с первым 5 и вторым 6 оптаческими клиньями с переменной плотностью, за которыми расположены второй 7 и третий 8 фотоприемники, а также через нейтральную пластинку 9 оптически связан с первым фотоприем НИКОМ 10. Первая 11 и вторая 12 схемы деления одними входами соедипены с выходами фотоприемников 7 . и 8 соответственно, а другими входами - с выходом фотоприемника 10. Элементы 5, 7 и 11 образуют координатный канал по выработке координаты X, а .элементы 6, 8 и 12 - коор
динаты V. Выходы схем 11 и 12 деления соединены с первым 13 и вторым 14 аналоговыми ключaм i соответственно. Диафрагма 3 механически соединена с шаговыми двигателями 11Щ X 15 и ШД У 16, а также с шаговым двигателем 17 изменения диаметра диафрагмы 3. Шаговые двигатели 15 и 16 подключены к первому 18 и второму 19 вентилям, а шаговый двигатель 17 к третьему вентилю 20. Выходы схем 11 и 12 деления-соединены с входами первого 21 и второго 22 компараторов, выходы которых соединены с соответствук}щими вентилями 18 и 19, а вторые входы соединены с выходами датчиков 23 по X и 24 по У линейного пе{)емещения. Диафрагма 3 механически связана также с датчиком 25 минимального диаметра диафрагмы 3, выход которого соединен с .третьим вентилем 20 и параллельно с вторыми входами аналоговых ключей 13 и 14. Источник 26 питания соединен с вторыми входами вентилей 18 - 20.
Предлагаемый способ осуществляют при помощи описанного устройства слеующим образом.
Световой поток от поля анализа етали 1 проецируют с помощью объектива 2 через диафрагму 3 на сЬзтоелительньш кубик 4. Разделенный световой поток в двух координатных каналах X и Y модулируют с по-: мощью оптических клиньев 5 и 6, коэффициенты пропускания которых зменяются по монотонным возрасающим или убывающим функциям, а в
3
опорном канале световой поток модулируют с помощью нейтральной пластинки 9 с постоянным коэффициентом пропускания. С помощью фотоприемни ков 7 и 8 формируют фотоэлектрические сигналы по координатным каналам, по X и Y соответственно, а с помощью фотоприемника 10 - опорный фотоэлектрический сигнал, По соотношению между сигналами координатных каналов и опорным с помощью схем 11 и 12 деления определяют координаты X и у центра яркости поля анализа детали (, Y)Если модуляция светового потока от дефекта осуществляется оптическими пластинами переменной плотности по известной зависимости, например линейно от координат, т.е.
)Л У,
то ток фотоприемников в координатных каналах по X и У можно представить в виде выражения
Хс/5 ,
, .
где Е - освещенность дефекта;
8„ - площадь дефекта. Ток опорного фотоприемника при этом равен
.Г, Е,5 dS. S
При делении выражений токов координатных каналов на опорный, осуществляемое схемой деления, получают вьфажения, пропорциональные координатам -г j
- ,
-ФХ
ФЭ
V .
В результате интегрирования световых потоков, поступающих на вход фотоприемников 7, 8 и 10, на выходе схем 11 и 12 деления вырабатывают координаты центра яркости всего поля анализа детали. Одновременно с этим производят процесс совмещения центра поля анализа с центром диафрагмы, осуществляемый шаговыми . двигателями 15 и 16. Для этого источ ник 26 подключается к шаговым двигателям 15 и 16 через вентили 18 и 19 до тех пор, пока компараторы 21 и 22 не вьфаботают импульсы равенства
70284
координат центра яркости текущего поля анализа и координат центра диафрагмы, получаемых от датчиков . 23 и 24 линейных перемещений. 5 В момент равенства этих сигналов вентили 18 и 19 закрывают подачу, питания на шаговые двигатели 15 и 16, и диафрагму 3 по осям X и Y не перемещают. Одновременно с линейным перемещением диафрагмы 3 по осям X и У производят диафрагмирование поля анализа детали, при этом часть следов дефектов маскируют и они исчезают. Это приводит к уменьшению поля анализа детали и к изменению текущих координат центра яркости-поля анализа. Эти координаты со схем 11 и. 12 деления соответственно координатным осям поступа- 20 к)т в соответствующие компараторы 21 и 22, где производят сравнение с текущими координатами центра диафрагмы 3.
Уменьшение диаметра зрачка диафрагмы 3 производят до тех пор,
пока шаговый двигатель 17 подключен через вентиль 20 к источнику 26 питания. С достижением зрачка диафрагмы 3 своего наперещ заданного jQ минимального диаметра срабатывает датчик 25, сигнал от которого закрывает вентиль 20 и открывает аналоговые ключи 13 и 14, через которые -выводят текущие значения координат центра яркости дефекта. Датчик минимального диаметра диафрагмы 25 представляет собой контактную группу и усилитель-формирователь электрического сигнала.
Таким образом, в конце работы устройства диаметр диафрагмы 3 минимален, диафрагма занимает новое положение, центр диафрагмы совпадает с центром яркости поля анализа, который благодаря диафрагмированию также достигает своего минимального размера. В этом положении со схем деления производят съем координат центра яркости дефекта на внешние устройства информации и регистрации.
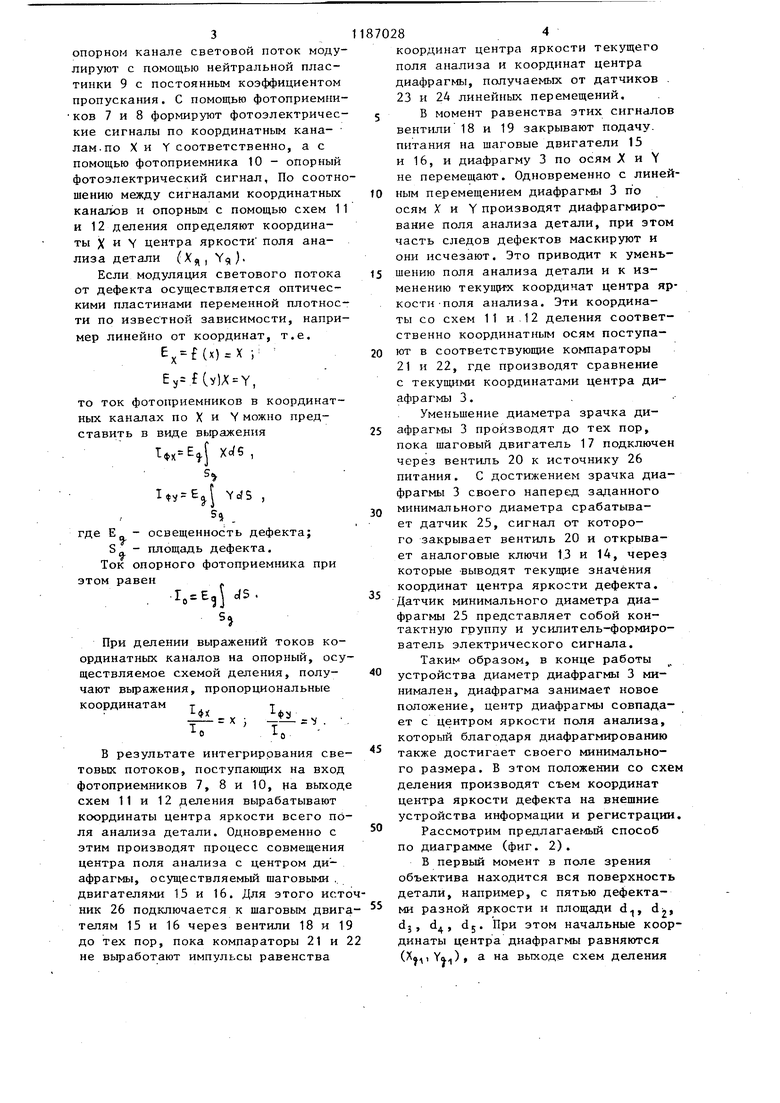
Рассмотрим предлагаемый способ по диаграмме (фиг. 2).
В первый момент в поле зрения объектива находится вся поверхность детали, например, с пятью дефектами разной яркости и площади d, dx, dj, d, dj. При этом начальные координаты центра диафрагмы равняются (), а на вьтходе схем деления
появлйются сигналы, пропорциональные координатам центра яркости суммы пяти дефектов (,). Пусть дефект dj. является наибольшим по размерам из пяти, тогда в первый момент центр яр-кости всей детали (как центр тяжести пяти фигур разнар массы) лежит в точке, приближенной к наибольшему дефекту, т.е. к d,. С помощью двухкоординатного привода диафрагму перемещают в сторону центра яркости с координатами (Xj,,Yj,), при этом уменьшают диаметр зрачка диафрагмы на лг
Перемещения диафрагмы производят от разностного сигнала, пропорционального взаимному положению центра диафрагмы и центра яркости поля ана.лиза (Х,- ) . Когда начинают диафрагмирование поляанализа и смещение диафрагмы, то наиболее удаленные от наибольшего дефекты исчезают из поля анализа, чем создают благоприятные условия для быстрой селекции дефектов по габаритам и яркости.
Если центр диафрагмы совпадает 10 с центром поля анализа, то координаты центра яркости дефекта будут (Х,1,Уя2.) а координаты диафрагмы
Y - Y
(X J2- я-t I
Этот цикл продолжают до тех пор )5 пока диаметр зрачка диафрагмы не достигнет минимального диаметра диафрагмы. Этот же сигнал подают на аналоговые ключи для вьщачи координат центра яркости наибольшего по 20 габаритным и световым параметрам дефекта.
| Катыс Г.П | |||
| Автоматическое сканирование | |||
| - М | |||
| ; Маигиностроение, 1969, с | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| 0 |
|
SU194433A1 | |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
