Изобретение относится к контрольно- измерительной технике, может быть исследовано в дефектоскопии при автоматизации визуального метода контроля деталей и является усовершенствованием устройства по авт. св. № 1187028.
Цель изобретения - повышение достоверности определения координат путем их измерения по порядку убывания яркости.
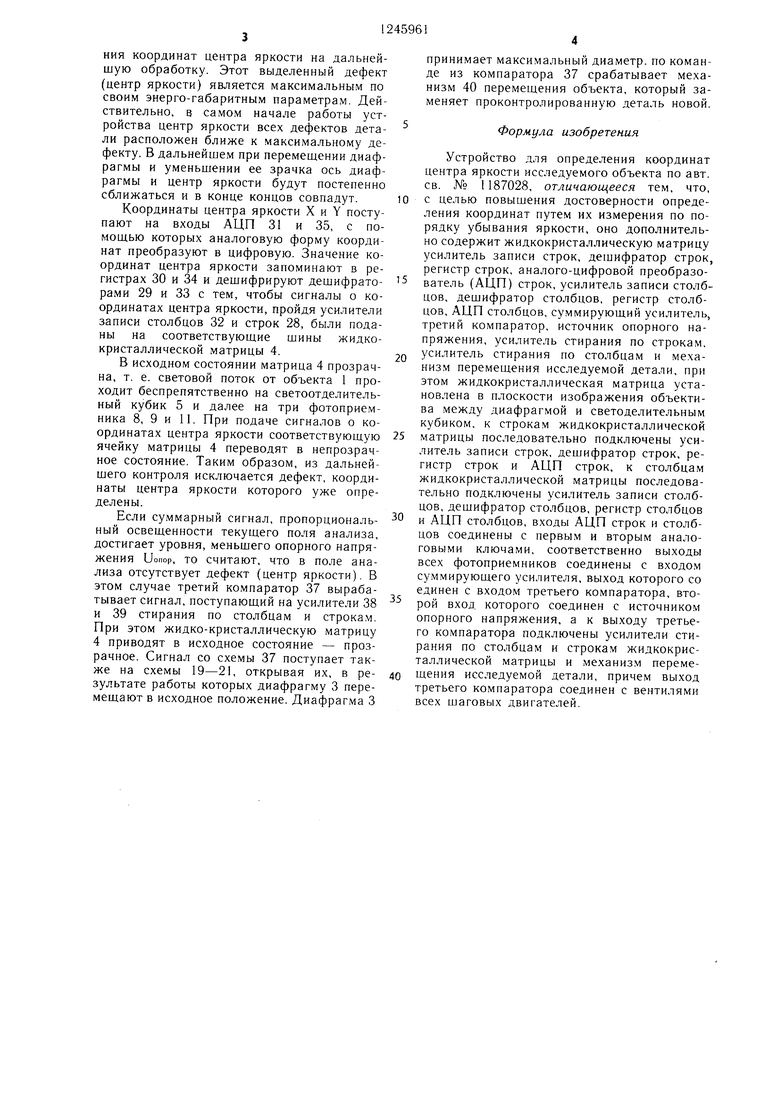
На чертеже изображена принципиальная схема устройства.
Устройство содержит исследуемый объект-деталь 1, объектив 2 диафрагму 3, расположенную в плоскости изображения объектива 2, жидко-кристаллическую матрицу 4 и светоделительный кубик 5, расположенные на одной оптической оси. Светоделитель- ный кубик 5 оптически связан с первым и вторым оптическими клиньями 6 и 7 соответственно, за которыми расположены второй и третий фотоприемники 8 и 9. Оптический кубик 5 через нейтральную плас- тинку 10 связан также с первым фотоприемником 11. Схемы 12 и 13 деления соединены с выходами фотоприемников 9 и 8, а вторыми входами - с фотоприемником П. Элементы 6, 9 и 13 образуют координатный канал по выработке координаты X, эле- менты 7, 8 и 12 - координаты Y, элементы 10 и 11 - элементы опорного канала. Выходь схем 12 и 13 деления соединены с первым и вторым аналоговыми ключами 14 и 15. Диафрагма 3 механически соединена с шаговыми двигателями (ДД) X 16 и Y 17, а также с шаговым двигателем 18 изменения диаметра диафрагмы 3. ШД 16 и 17 подключены к первому вентилю 19 и к второму вентилю 20, а ШД 18 - к третьему вентилю 21. Выходы схем 12 и 13 деления соединены соответственно с входами первого 22 и второго 23 компараторов, выходы которых соединены с вентилям) 19 и 20, а вторые входы подключены к выходам датчиков линейного перемещения по координате X 24 и по Y 25. Диаф- рагма 3 механически связана также с датчиком 26 минимального зрачка диафрагмы 3, выход которого соединен с третьим вентилем 21 и параллельно - с вторыми входами аналоговых ключей 14 и 15.
Источник 27 питания шаговых двигате- лей соединен с вторыми входами вентилей 19-21. Выводы строк жидко-кристаллической матрицы 4 подключены к усилителю 28 записи строк, входы которых через дешифратор 29 строк и регистр 30 строк подключены к выходам АЦП 31 строк, вход последнего соединен с выходом аналогового ключа 14. Выводы столбцов жидко-кристаллической матрицы 4 подключены к усилителям 32 записи столбцов, входы которых через дешифратор 33 столбцов и регистр 34 столбцов подключены к выходам АЦП столбцов, вход последнего соединен с выходом аналогового ключа 15. Выходы трех фото
приемников 8,9 и 11 подключены к суммирующему усилителю 36, выход которого подсоединен на первый вход третьего компаратора 37, на второй вход которого подан опорный сигнал, соответствующий отсутствию дефекта. Выход третьего компаратора 37 параллельно включен на входы усилителей 38 и 39 стирания столбцов и строк соответственно, а также подсоединен к механизму 40 меремещения объекта 1.
Устройство работает следующим образом.
В начальный момент жидко-кристаллическая матрица 4 находится в прозрачном состоянии, а световой поток от объекта 1 проходит через объектив 2, диафрагму 3, матрицу 4 и попадает на свето- отделительный кубик 5. Разделенный световой поток в двух координатных каналах X и Y модулируют с помощью оптических клиньев 6 и 7, коэффициенты пропускания которых изменяются по монотонным возрастающим или убывающим функциям, а в опорном канале световО й поток модулируют с помощью нейтральной пластинки 10 с постоянным коэффициентом пропускания. С помощью фотоприемников 8 и 9 формируют фотоэлектрические сигналы по координатным каналам X и Y соответственно, а с помощью фотоприемника 11 - опорный фотоэлектрический сигнал. По соотношению между сигналами координатных и опорных каналов с помощью схем 12 и 13 деления определяют координаты X и Y центра яркости всех дефектов детали 1. После этого по сигналам координат производят процесс совмещения центра диафрагмы 3 с центром яркости дефектов, осуществляемой ШД X 16 и ШД Y 17. Для этого источник 27 питания ШД подключают к ШД X 16 и ШД Y 17 через вентили 19 и 20 до тех пор, пока компараторы 22 и 23 не вырабатывают импульсы равенства координат центра яркости и координат центра диафрагмы 3, получаемых от датчиков 24 и 25 линейных перемещений.
В момент совпадения оси диафрагмы 3 с центром яркости вентили 19 и 20 закрывают подачу питания на ШД X 16 и ШД Y 17. после этого диафрагму 3 по координатным осям X и У не перемещают. Одновременно с линейными перемещениями диафрагмы 3 по координатным осям X и Y производят диафрагмирование поля анализа детали, при этом часть дефектов (центров яркости) маскируют, и они исчезают из поля анали-, за. Исчезновение части дефектов из поля анализа приводит к тому, что изменяются значения текущих координат центра яркости оставшихся дефектов. Уменьшение диаметра диафрагмы 3 производят до тех пор, пока ШД 18 подключен через вентиль 21 к источнику 27. С достижением диафрагмой 3 своего минимального диаметра срабатывает датчик 26, сигнал от которого закрывает вентиль 21 и открывает аналоговые ключи 14 и 15, через которые снимают значения координат центра яркости на дальнейшую обработку. Этот выделенный дефект (центр яркости) является максимальным по своим энерго-габаритным параметра.м. Действительно, в самом начале работы устройства центр яркости всех дефектов дета- ли расположен ближе к максимальному дефекту. В дальнейшем при перемешении диафрагмы и уменьшении ее зрачка ось диафрагмы и центр яркости будут постепенно сближаться и в конце концов совпадут.
Координаты центра яркости X и Y поступают на входы АЦП 31 и 35, с но- мощью которых аналоговую форму координат преобразуют в цифровую. Значение координат центра яркости запоминают в регистрах 30 и 34 и дешифрируют дешифрато- рами 29 и 33 с тем, чтобы сигналы о координатах центра яркости, пройдя усилители записи столбцов 32 и строк 28, были поданы на соответствующие шины жидкокристаллической матрицы 4.
В исходном состоянии матрица 4 прозрачна, т. е. световой поток от объекта 1 проходит беспрепятственно на светоотделитель- ный кубик 5 и далее на три фотоприемника 8, 9 и П. При подаче сигналов о координатах центра яркости соответствующую ячейку матрицы 4 переводят в непрозрачное состояние. Таким образом, из дальней- щего контроля исключается дефект, координаты центра яркости которого уже определены.
Если суммарный сигнал, пропорциональ- ный освещенности текущего поля анализа, достигает уровня, меньшего опорного напряжения Uonop, то считают, что в поле анализа отсутствует дефект (центр яркости). В этом случае третий компаратор 37 вырабатывает сигнал, поступающий на усилители 38 и 39 стирания по столбцам и строкам. При этом жидко-кристаллическую матрицу 4 приводят в исходное состояние - прозрачное. Сигнал со схемы 37 поступает также на схемы 19-21, открывая их, в ре- зультате работы которых диафрагму 3 перемещают в исходное положение. Диафрагма 3
принимает максимальный диаметр, по команде из компаратора 37 срабатывает механизм 40 перемещения объекта, который заменяет проконтролированную деталь новой.
Формула изобретения
Устройство для определения координат центра яркости исследуемого объекта по авт. св. № 1187028, отличающееся тем, что, с целью повышения достоверности определения координат путем их измерения по порядку убывания яркости, оно дополнительно содержит жидкокристаллическую матрицу усилитель записи строк, дешифратор строк регистр строк, аналого-цифровой преобразователь (АЦП) строк, усилитель записи столбцов, дешифратор столбцов, регистр столбцов, АЦП столбцов, суммирующий усилитель третий компаратор, источник опорного напряжения, усилитель стирания по строкам, усилитель стирания по столбцам и механизм перемещения исследуемой детали, при этом жидкокристаллическая матрица установлена в плоскости изображения объектива между диафрагмой и светоделительным кубиком, к строкам жидкокристаллической матрицы последовательно подключены усилитель записи строк, дешифратор строк, регистр строк и АЦП строк, к столбцам жидкокристаллической матрицы последовательно подключены усилитель записи столбцов, дешифратор столбцов, регистр столбцов и АЦП столбцов, входы АЦП строк и столбцов соединены с первым и вторым аналоговыми ключами, соответственно выходы всех фотоприемников соединены с входом суммирующего усилителя, выход которого со единен с входом третьего компаратора, второй вход которого соединен с источником опорного напряжения, а к выходу третьего компаратора подключены усилители стирания по столбцам и строкам жидкокристаллической матрицы и механизм перемещения исследуемой детали, причем выход третьего компаратора соединен с вентилями всех шаговых двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат центра яркости следа дефекта детали | 1985 |
|
SU1280506A1 |
| Способ определения координат центра яркости дефектов детали и устройство для его реализации | 1983 |
|
SU1187028A1 |
| Способ определения координат центров яркости дефектов детали | 1986 |
|
SU1379706A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ СВЕТОВЫХ ОБЪЕКТОВ | 2009 |
|
RU2408899C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2550523C2 |
| Устройство для вычисления моментов изображений | 1990 |
|
SU1795484A1 |
| Устройство для регистрации ритма сердечной деятельности и характера его изменений | 1978 |
|
SU784867A1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2009 |
|
RU2414737C1 |
| Телевизионная система для наблюдения за перемещением горячего проката | 2020 |
|
RU2727527C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК РАССЕЯНИЯ ДРОБОВЫХ РУЖЕЙ И БОЕПРИПАСОВ | 2001 |
|
RU2205353C2 |

Изобретение относится к контрольно- измерительной технике и может быть использовано в дефектоскопии при автома- тизации визуального метода контроля деталей с целью повышения достоверности определения координат центра яркости исследуемого объекта их измеряют по порядку убывания яркости за счет введения дополнительно в устройство жидкокристаллической матрицы и механизма перемещения объекта, которые соединены с электрической схемой, обеспечивающей автоматизацию считывания оптической информации с поверхности образца. 1 ил. 1C ел ;о О) 
| Способ определения координат центра яркости дефектов детали и устройство для его реализации | 1983 |
|
SU1187028A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
