(54) УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ
ИНФОРМАЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кодирования чертежей печатных плат | 1979 |
|
SU858029A1 |
| Следящая система | 1975 |
|
SU585474A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| УСТРОЙСТВО для КОДИРОВАНИЯ и ВОСПРОИЗВЕДЕНИЯ КАРТ ПОТЕНЦИАЛЬНЫХ ПОЛЕЙ | 1968 |
|
SU208345A1 |
| Устройство для управления шаговым режимом работы конвейера | 1988 |
|
SU1747359A1 |
| Устройство для адаптивного управления движением сварочной головки по стыку | 1985 |
|
SU1348108A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Автоматический цифровой микроденситометр | 1973 |
|
SU481823A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
1
Изобретение относится к автоматике и вычислительной технике, в частности к устройствам для считывания графической информации, и может быть испсшьзовано при считывании и вводе картографической информации в ЭВМ.
Известно устройство для считыва-; ния графической информации , содержащее фотоэлектронные преобразователи с фотодатчиками, расположенными на следящей головке, перемещаемой по осям координат двумя приводами с шаговыми двигателями, механизм поворота головки, датчики положения относительно осей координат, датчик угла поворота головки, задающий генератор, счетчики, дешифратор, триггеры и логические схемы, причем фотодатчики расположены на следящей головке в виде трех групп, каждая из которых состоит из двух датчиков на один из которых в режиме слежения за кривой проектируется изображение считываемого участка этой кривой, а на второй - поле носителя изображения; выходы фотодитчиков соединены с логическими схемами формирования сигналов нормального расположения фотодатчиков относительно края линии, изгиба линии, пересечения двух линий, сигнала сбоя, а также со схемами формирования сигналов управления следящей головкой. Выходы схеМ формирования сигналов управления головкой по осям координат соединены со входами схем И, вторые, входы которых подключены к выходам датчика угла поворота, а выходы схем И соединены через группу схем ИЛИ
0 с импульсно-потенциальными вентилями, вторые входы которых подключены к задающему генератору. Потенциальные входы вентилей соединены с выходом триггера запуска, а их
5 выходы - со входами блоков управления шаговыми двигателями, механически связанными с датчиками положения следящей головки, соединенными через дешифраторы с вентилями переда0чи кодов координат, и через схемы ИЛИ - со входом счетчика формирования шага считывания, подключенного ко входам дешифратора. Выходы дешифратора через переключатель вели5чины шара: соединены со счетчиками формирования номера точки. Известное устройство обеспечивает следжисс считывание графических кривых ijОднако вследствие реакции следящей.головки на черно-белую границу
контура кривой в данном устройстве имеет место погрешность определения координат считываемой кривой; возможны сбои и искажения траектории слежения при наличии дефектов границы контура отслеживаемой кривой.
Наиболее близким техническим решением к данному является устройство, содержащее фотосчитывающий элемент, соединенный с логическим блоком, приводы, соединенные с задающим генератором, с блоком управления и с датчиками координат, ВЫХОДЫ которых через блоки определений координат подключены к блоку управления f2J,
Недостаток устройства заключается в низкой точности и помехоустойчивости .
Цель изобретения - повышение точности и помехоустойчивости устройства.
Поставленная цель достигается тем, что в устройстве входы блоков определения координат и приводов .соединены с логическим блоком, подключенным к задающему генератору и к блоку управления.
Кроме того логический.блок содержит первые триггеры, входы которых подключены к формирователю сигналов установки триггеров, а выходы через узел определения координаты и направления движения фотосчитывающего элемента соединены со входами вторых триггеров, элементы И, подключенные к первьам и вторым триггерам и через элемент ИЛИ к счетчику, выход которого соединен с формирователем сигналов установки триггеров, подключенным к первым триггерам.
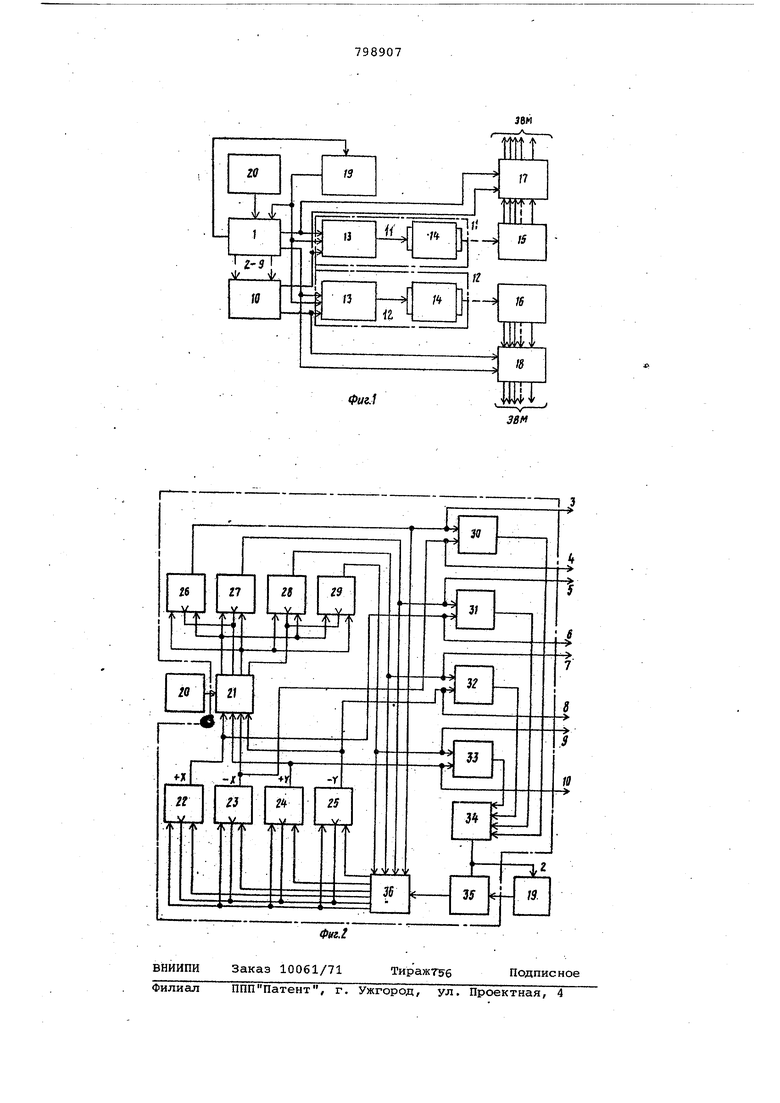
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - конструктивное выполнение логического блока.
Устройство включает логический блок 1 с выходными шинами 2-9, блок 10 управления., предназначенный для управления следящей головкой, приводы 11 и 12, содержащие узлы 13 управления и шаговые двигатели 14, датчики координат 15 и 16, блоку 17 и 18 определения координат, задающий генератор 19/ фотосчитывающий элемент 20, конструктивно закрепленный на следящей головке (на чертеже не показана), узел определения координат и:направления движения фотосчитывающего элемента 21, первые триггеры 22-25,вторые триггеры 2629, элементы И 30-33, элемент ИЛИ 34 счетчик 35 и формирователь 36 сигналов установки триггеров.
Устройство работает следующим образом.
В режиме следящего считывания
осуществляется определение взаимного
расположения середины, участка отсле. живаемой кривой и оптического центра
фотосчитывающего элемента 20, совпадающего с центром анализирующей развертки, на основании чего формируется сигнал рассогласования для управления шаговыми двигателями 14, которые обеспечивают движение следяшей головки по траектории, совпадающей с узлами дискретной рещетки поля носителя изображения, Кодирование координат производится с заданным шагом квантования по одной из координатных осей, либо пропорционально длине кривой с выдачей данных на внешнее устройство (перфоратор, ЭВМ) в международном телеграфном коде М2. Начало отсчета координат может .быть от заданной опорной точки, либо от условного нуля координат.
Работа предлагаемого устройства в режиме следящего считывания основана на принципе использования четырех направлений едининных шагов +Х, .-X, +У, -У, при этом фиксируется основное направление движения (триггеры 22-25), совпадающие с отслеживамой кривой, а по второй координате производится отработка рассогласования (триггеры 26-29). Считывающий луч фотосчитывающего элемента 20, размещенного на следящей головке, осуществляет крестообразную развертку участка изображения исследуемой кривой, спроектированного объек1ивом на фотосчитывающий элемент 20, выполняющий роль датчика координатного описания отслеживаемой кривой. В качестве выходного сигнала Датчика используются непосредственно .координатные составляющие, пропорциональные отклонению центра участка кривой относительно оптического центра фотосчитывающего элемента 20 и поступающие после обработки узлом 21 на вход вторых триггеров 26-29 движения отработки. При наличии сигнала на выходе одного из первых триггеров 22-25 основного движения, устанавливаемых в начальный момент В1§ешней командой, обеспечивающей движение следящей головки вдоль исследуемой кривой в одном из направлений, соответственно +Х, -X, +у, -у, и сигналов на выходе первых триггеров 22-25 будут иметь место сигналы управления, которые по шинам 2-9 через блок 10 управления подаются на узлы 11 и 12 yпpaвлeJния шаговыми двигателями 14, что обеспечивает работу устройства в режиме однокоординатного считывания. Основное движение продол кается по заданной координате и в том случае, когда появляется сигнгш рассогласования по координатам отработки. Но в этом случае вместе с основным движением осуществляется и движение отработки в направлении координаты, по которой получен сигнал рассогласования. При достижении линией наклона более 45 лр возникает рассогласование по каналу основного движения, что является условием перекл очения направления основного движения. В этом случае включается цепь цифровой задержки, обеспечивающая анализ данного участка считываемой кривой.
Работа данной цепи в составе устройства осуществляется следующим образом.
При наличии изгиба отслеживаемой кривой под углом 45® к направлению заданного основного движения, т.е. при появлении сигнала движения отработки, противоположного направлению основного движения, должно быть осуществлено переключение координат ословного движения, причем знак новой координаты должен, соответствовать знаку Отработки.
Переключение направления основного движения осуществляется за счет рбрабэтки. сигнала с выхода элемента ИЛИ 34, входы которого соединены с выходами элементов И 30-33, служащих для фиксирования указанных условий. При наличии сигнала-на выход элемента ИЛИ запускается счетчик 35, обеспечивающий цифровую задержку сигнала переключения направления основного движения для устранения, случайных срабатываний схемы переключения из-за дефектов отслеживаемой кривой, и производится дискретное, обратно пропорциональное криви зне считываемого участка кривой, управление частотой, а соответственно, и скоростью считывания задающего генератора. Если имеет место дефект границы кривой, то после отработки определеннбго числа шагов в направлении заданного основного движения, определяемого схемой цифрово задержки, счетчик 35 устанавливается в исходное состояние, т.е. отслеживание данного участка кривой производится без переключения направления основного движения.
Если же имеет место изгиб криврй под углом 90, то за счет цифровой, задержки следящая головка подводится к точке перегиба отслеживаемой кривой, а счетчик 35 вырабатывает сигнал, подаваемый на вход формирователя сигналов установки триггеров 36, который осуществляет установку в единичное- состояние одного из первых триггеров 22-25 в соответствии с направлением изгиба отслеживаемой кривой.. Скорость считывания выполнения логических опёраций как в случае наличия дефекта
границы кривой, так и в случае от- Е)аботки из.гиба кривой возвращается к своей исходной величине. Дальнейшее считывание кривой идет по описанному алгоритму.
Считывание и регистрация текущих координат кривой производится с помощью блоков определения координат 17 и 18, обеспечивакяцих возможность произвольной установки начала координат и осуществляющих дешиф- .
0 рацию циклических кодов, снимаемых с датчиков 15 и 16 координ.ат/кинематически связанных с шаговыми двигателями 14.
Введение новых конструктивных
5 связей, а также новое конструктивное выполнение логического блока.позволяет существенно, повысить точность и помехоустойчивость устройства.
Формула изобретения
и приводов соединены с логическим блоком, подключенным к задающему генератору и блоку управления.
И, подключенные к первым и вторым триггерам и через элемент ИЛИ к счетчику, вь1ход которого соединен с формирователем сигналов установки триггеров, подключенным к первым триггерам.
Источники информации, принятые во внимание при экспертизе
