Механизмы поворота целиком подвижного горизонтального оперения самолета, состоящие из цилиндра с двумя телескопически сидящими в нем штоками известны.
Однако известные механизмы поворота не обеспечивают продольную управляемость самолета и аэродинамическое торможение при пробеге после приземления.
В описываемом механизме поворота эти недостатки устранены.
Сущность изобретения состоит в том, что, с целью осуществления на первой ступени движения поворота оперения в пределах, обеспечивак щих продольную управляемость самолета, а на второй ступени - поворота перпендикулярно набегающему потоку для достижения аэродинамического торможения при пробеге после приземления, цилиндр выполнен вращающимся, а щтоки совершающими возвратно-поступательное движение.
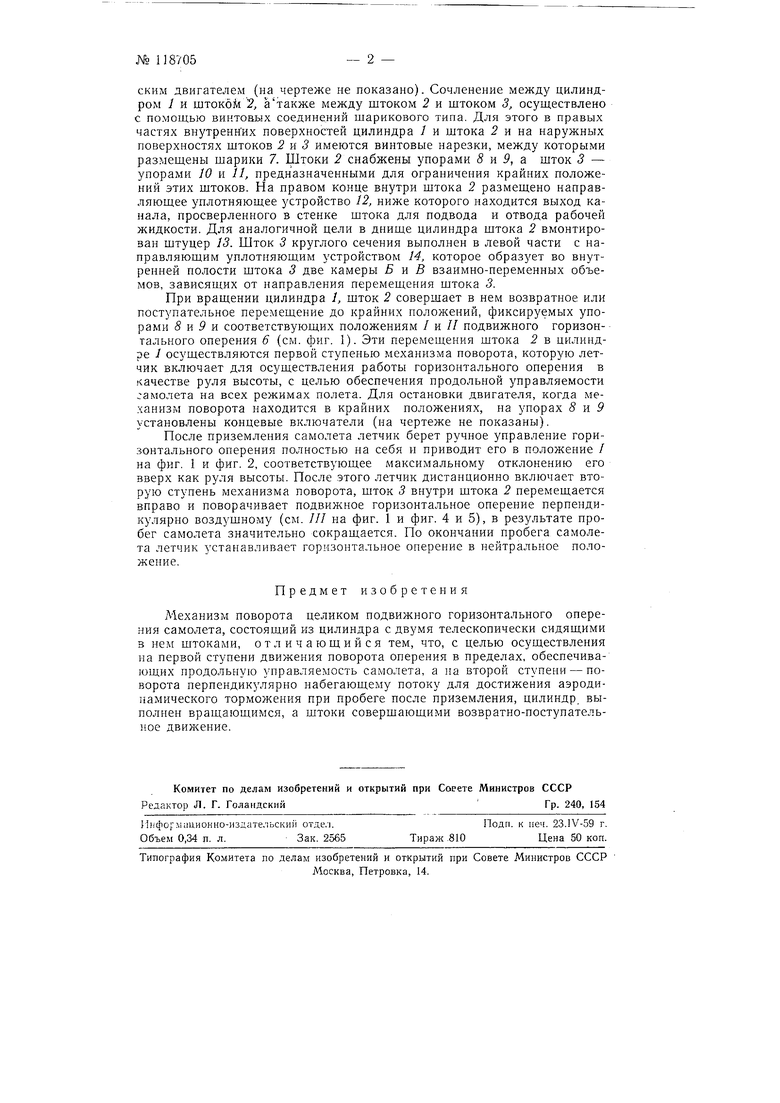
На фиг. 1 изображена принципиальная схема положений горизонтального оперения, устанавливаемых механизмом поворота; на фиг. 2 - двухступенчатый винтовой механизм поворота в положении, соответствующем максимальному углу отклонения вверх горизонтального оперения, работающего как руль высоты (см. положение I на фиг. 1); на фиг. 3- в положении, соответствующем максимальному отклонению вниз горизонтального оперения перпендикулярно набегающему потоку (см. полона фиг. 1); на фиг. 4-в положении, соответствующем от1;лонени о горизонтального оперения, работающего, как руль высоты (см. положение II жение III на фиг. 1); на фиг. 5 - изображен двухступенчатый гидровинтовой механизм поворота в положении, соответствующем фиг. 4.
Описываемый двухступенчатый винтовой механизм поворота состоит из вращаемого цилиндра /, телескопически расположенного в нем пустотелого щтока 2 и щтока 3, телескопически расположенного внутри щтока 2. Правый конец штока 5 выполнен проущиной 4, которой он крепится в качалке 5 подвижного горизонтального оперения 6. Цилиндр / приводится во вращение через редуктор электрическим или гидравличе№ 118705
ским двигателем (на чертеже не показано). Сочленение между цилиндром 1 и штоком 2, атакже между штоком 2 и штоком 3, осуш.ествлено с помощью винтовых соединений шарикового типа. Для этого в правых частях внутренних поверхностей цилиндра / и штока 5 и на наружных поверхностях штоков 2 и 3 имеются винтовые нарезки, между которыми размещены шарики 7. Штоки 2 снабжены упорами 5 и 5, а шток 3 - упорами 10 и 11, предназначенными для ограничения крайних положений этих штоков. На правом конце внутри штока 2 размешено направляющее уплотняющее устройство 12, ниже которого находится выход канала, просверленного в стенке штока для подвода и отвода рабочей жидкости. Для аналогичной цели в днище цилиндра штока 2 вмонтирован штуцер 13. Шток 3 круглого сечения выполнен в левой части с направляющим уплотняющим устройством 14, которое образует во внутренней полости штока 5 две камеры Б и В взаимно-переменных объемов, зависящих от направления перемещения штока 3.
При вращении цилиндра 1, шток 2 совершает в нем возвратное или поступательное перемешение до крайних положений, фиксируемых упорами 5 и 9 и соответствующих положениям / и // подвижного горизонтального оперения 6 (см. фиг. 1). Эти перемещения штока 2 в цилиндэе 1 осуществляются первой ступенью механизма поворота, которую летчик включает для осуществления работы горизонтального оперения в качестве руля высоты, с целью обеспечения продольной управляемости самолета на всех режимах полета. Для остановки двигателя, когда механизм поворота находится в крайних положениях, на упорах S и Р установлены концевые включатели (на чертеже не показаны).
После приземления самолета летчик берет ручное управление горизонтального оперения полностью на себя и приводит его в положение / на фиг. 1 и фиг. 2, соответствующее максимальному отклонению его вверх как руля высоты. После этого летчик дистанционно включает вторую ступень механизма поворота, шток 3 внутри штока 2 перемещается вправо и поворачивает подвижное горизонтальное оперение перпендикулярно воздушному (см. /// па фиг. 1 и фиг. 4 и 5), в результате пробег самолета значительно сокращается. По окончании пробега самолета летчик устанавливает горизонтальное оперение в нейтральное положение.
Предмет изобретения
Механизм поворота целиком подвижного горизонтального оперения самолета, состоящий из цилиндра с двумя телескопически сидящими в нем штоками, отличающийся тем, что, с целью осуществления на первой ступени движения поворота оперения в пределах, обеспечивающих продольную управляемость самолета, а на второй ступени - поворота перпендикзлярно набегающему потоку для достижения аэродинамического торможения при пробеге после приземления, цилиндр, выполнен вращающимся, а штоки совершающими возвратно-поступательное движепие.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2013 |
|
RU2533933C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ ОБЪЕКТОВ НА ОКОЛОЗЕМНУЮ ОРБИТУ И МНОГОРАЗОВЫЙ СОСТАВНОЙ АЭРОКОСМИЧЕСКИЙ РАКЕТНЫЙ САМОЛЕТ-НОСИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (АЭРОКОСМИЧЕСКАЯ СИСТЕМА " НУР-САИД") | 2001 |
|
RU2232700C2 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2482021C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ МУХАМЕДОВА НА ПРЫЖКОВОМ ШАССИ | 2011 |
|
RU2497721C2 |
| САМОЛЕТ С ПЛОСКИМ ХВОСТОВЫМ ОПЕРЕНИЕМ | 2002 |
|
RU2220072C1 |
| САМОЛЕТ | 1993 |
|
RU2087384C1 |
| СИСТЕМА ПОВЫШЕНИЯ УПРАВЛЯЕМОСТИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2520850C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ОДНОМЕСТНЫЙ САМОЛЕТ С КОМПЛЕКСНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2016 |
|
RU2630030C1 |
| МНОГОРАЗОВЫЙ РАКЕТНО-АВИАЦИОННЫЙ МОДУЛЬ И СПОСОБ ЕГО ВОЗВРАЩЕНИЯ НА КОСМОДРОМ | 2010 |
|
RU2442727C1 |

Комитет по делам изобретений и открытий при Соеете Министров СССР Редактор Л. Г. ГоландскийГр. 240, 154
{ формиционно-издательский отдел.Подп. к печ. 23.IV-59 г.
Объем 0,34 п. л.Зак. 2565Тираж ,810Цена 50 коп.
Типография Комитета по делам изобретений и открытий при Совете Министров СССР
Москва, Петровка, 14.
W°/f5705
