Область техники, к которой относится изобретение
Настоящее изобретение относится к авиастроительной промышленности, в частности к проектированию летательных аппаратов, и предназначено для реализации в конструкции горизонтального хвостового оперения летательного аппарата, преимущественно самолета.
Цель изобретения
Техническая задача, решаемая изобретением, заключается в разработке системы, которая позволила бы уменьшить конструктивный размер стабилизатора летательного аппарата. Это должно привести к снижению веса и аэродинамического сопротивления летательного аппарата и, как следствие, к сокращению расходов при эксплуатации летательного аппарата.
Изобретение предназначено для летательного аппарата, оснащенного переставным стабилизатором, что является традиционным решением для гражданских летательных аппаратов. Летательные аппараты с переставным стабилизатором имеют систему управления перестановкой стабилизатора, обеспечивающую поворот всего стабилизатора для его установки под заданным углом (углом установки) относительно летательного аппарата, что приводит к изменению угла атаки стабилизатора. Назначение системы управления перестановкой стабилизатора заключается в автоматическом поддержании продольной балансировки летательного аппарата, т.е. уравновешивании летательного аппарата в продольном канале управления без необходимости вмешательства летчика. Под продольной балансировкой понимается балансировка летательного аппарата по тангажу. Таким образом, если управляющее воздействие со стороны летчика, такое как отклонение руля высоты, изменение тяги двигателей или выпуск/уборка механизации крыла, выведет летательный аппарат из требуемого состояния продольной уравновешенности, переставной стабилизатор автоматически повернется для создания необходимой подъемной силы (отрицательной или положительной), удерживающей летательный аппарат в новом отбалансированном положении при нахождении руля высоты в нейтральном положении.
При проектировании летательного аппарата с определенной конфигурацией стабилизатора и его геометрическими характеристиками (размер, угол поперечного V, угол стреловидности, толщина, крутка и форма профиля и т.д.), размер стабилизатора в основном определяется компромиссом между продольной устойчивостью (статической и динамической) и управляемостью летательного аппарата.
Устойчивость летательного аппарата определяется как способность летательного аппарата восстанавливать равновесие после небольших внешних возмущений по скорости набегающего потока и/или углу атаки отбалансированного летательного аппарата автоматически, т.е. без вмешательства летчика, и поддерживать это равновесие в дальнейшем. Продольная устойчивость - это устойчивость летательного аппарата по тангажу.
Говоря простым языком, влияние стабилизатора (или горизонтального хвостового оперения в целом) на продольную устойчивость летательного аппарата зависит от положения центра масс летательного аппарата, изменяющегося во время полета летательного аппарата, а также от коэффициента, характеризующего размер стабилизатора, известного как объем стабилизатора. Чем дальше от центра масс расположен стабилизатор и чем он больше, тем выше продольная устойчивость летательного аппарата.
Управляемость же летательного аппарата определяется как способность создавать необходимые силы и моменты, позволяющие летательному аппарату выполнять любые требуемые маневры. В частности, продольная управляемость - это способность летательного аппарата создавать подъемную силу, достаточную для достижения необходимого момента тангажа.
Продольная управляемость летательного аппарата определяется аэродинамическими характеристиками стабилизатора, выраженными зависимостью коэффициента подъемной силы стабилизатора от его угла атаки, который обычно отличается от угла атаки летательного аппарата, поскольку наличие крыла и его механизации изменяют угол атаки стабилизатора на величину, известную как угол скоса потока вниз. Для данной конфигурации стабилизатора (при данном угле его установки) коэффициент подъемной силы стабилизатора имеет максимум и минимум, соответственно, при максимальном (положительном по знаку) и минимальном (отрицательном по знаку) угле атаки стабилизатора; эти максимальные и минимальные значения называются значениями коэффициента подъемной силы при критических углах атаки, и при этих значениях наступают значительные срывные явления.
После определения минимального конструктивного размера стабилизатора, необходимого для соответствия условиям обеспечения продольной устойчивости, в зависимости от типа летательного аппарата, площадь аэродинамической поверхности стабилизатора обычно необходимо увеличить относительно вышеупомянутого минимального размера для соответствия условиям управляемости, в подобных случаях говорят, что конструкция летательного аппарата ограничивается условиями управляемости. Увеличение площади аэродинамической поверхности означает, что в таких случаях коэффициент подъемной силы, необходимый для выполнения требуемых маневров, не превысит значений, достигаемых при критических углах атаки.
Техническая задача, решаемая настоящим изобретением, заключается в уменьшении размера переставного стабилизатора в конструкциях летательных аппаратов, где этот размер ограничен условиями обеспечения управляемости, иными словами, с минимальным размером стабилизатора, определяемым условиями обеспечения продольной устойчивости. Таким образом, объектом изобретения является система повышения управляемости для летательного аппарата, которая, в свою очередь, обеспечивает прирост коэффициента подъемной силы стабилизатора, что позволяет уменьшить размер стабилизатора и вес летательного аппарата в целом, таким образом давая преимущество сокращения затрат на эксплуатацию летательного аппарата.
Уровень техники
Известно, что для достижения прироста коэффициента подъемной силы аэродинамических поверхностей применяют средства механизации, обычно используемые применительно к крыльям. Известно множество различных типов устройств механизации, которые используются в отдельности или в сочетании с другими средствами механизации и, вообще говоря, либо обеспечивают изменение формы профиля аэродинамической поверхности (подвижная механизация), либо управляют пограничным слоем (энергетическая механизация в виде системы отсоса или сдува пограничного слоя), и все это для того, чтобы затянуть отделение потока от обтекаемой поверхности, а значит, и срыв потока.
К подвижной механизации относятся устройства, которые перемещаются относительно крыла (выдвигаются или отклоняются) и действие которых основано на удлинении хорды профиля или изменении кривизны профиля. Элементы механизации приводятся в действие по командам летчика, как правило, для выполнения маневров, при которых летательному аппарату нужна большая подъемная сила, например при взлете и посадке. Обычно существует два основных подхода к управлению механизацией: (а) выпуск и уборка механизации с помощью исполнительного механизма или (б) использование электрического двигателя, который обеспечивает выпуск и уборку механизации посредством нескольких приводных валов, редукторов и звеньев передаточных механизмов (например, тяг).
Механизация горизонтального хвостового оперения явилась бы возможным решением технической задачи, положенной в основу настоящего изобретения, поскольку в области критических углов атаки приведение в действие механизации дало бы дополнительную подъемную силу, что позволило бы уменьшить эффективную площадь поверхности стабилизатора и его размер, необходимые по условиям управляемости. Это решение известно из уровня техники применительно к самолету Ан-70, стабилизатор которого оснащен по передней кромке механизацией типа предкрылка (дефлектора), отклоняемого при выпуске закрылков. Однако это решение, в частности, и установка регулируемых элементов механизации на стабилизаторе вообще считаются не вполне подходящими для решения указанной технической задачи из-за сложности установки элементов механизации и управления ими, а также ухудшения весовой эффективности летательного аппарата, обусловленного необходимостью реализации системы приводов или электрических двигателей.
В качестве альтернативы подвижной механизации известны также неподвижные элементы механизации, устанавливаемые на горизонтальном хвостовом оперении по передней кромке (самолет СВА-123). Эти элементы механизации обеспечивают прирост подъемной силы при высоких значениях угла атаки стабилизатора, однако им присущ тот недостаток, что повышение подъемной силы при высоких углах атаки ведет к ухудшению подъемной силы или сопротивления при других значениях угла атаки стабилизатора.
Раскрытие изобретения
Для решения поставленной технической задачи в соответствии с изобретением предлагается установить на горизонтальном хвостовом оперении, а именно на стабилизаторе, подвижные элементы механизации для повышения коэффициента подъемной силы стабилизатора.
Кроме того, для преодоления упомянутых недостатков уровня техники при создании изобретения поставлена цель достижения следующих технических эффектов:
- во-первых, использовать движение поворота стабилизатора для сообщения элементу механизации стабилизатора движения отклонения;
- во-вторых, обеспечить избирательным образом увеличение коэффициента подъемной силы стабилизатора во всем диапазоне значений угла атаки стабилизатора, в частности при критических углах атаки стабилизатора.
Первый технический эффект обеспечивает упрощение конструкции предлагаемой в изобретении системы повышения управляемости летательного аппарата, в частности позволяет отказаться от необходимости установки приводов или двигателей, предназначенных для отклонения элемента механизации.
Второй технический эффект обеспечивает создание отклонения элемента механизации стабилизатора, достаточного для увеличения абсолютного значения (значения по модулю) коэффициента подъемной силы стабилизатора, в зависимости от изменяющихся углов атаки стабилизатора без ухудшения подъемной силы и сопротивления при других значениях углов атаки.
В сущности, предлагаемое в изобретении решение основано на привязке отклонения элемента механизации стабилизатора к движению поворота стабилизатора, создаваемому системой управления перестановкой стабилизатора. Функция, связывающая указанное движение отклонения элемента механизации с движением поворота стабилизатора называется законом отклонения.
Один технический аспект, связанный с указанным законом отклонения, предусматриваемым предлагаемой в изобретении системой повышения управляемости летательного аппарата, заключается в том, что - с учетом предназначения системы управления перестановкой стабилизатора для продольной балансировки летательного аппарата - при увеличении абсолютного значения (значения по модулю) угла установки переставного стабилизатора увеличивается его угол атаки. Следовательно, при повороте стабилизатора на максимальные углы установки достигаются критические углы атаки. Поскольку для критических углов атаки необходимо обеспечить максимальные по модулю отклонения элемента механизации, отсюда следует возможность реализации закона отклонения элемента механизации, который за счет увеличения угла отклонения элемента механизации с увеличением угла установки стабилизатора (речь идет об абсолютных значениях углов) обеспечивает безотрывное обтекание стабилизатора во всем диапазоне углов атаки при любом положении стабилизатора между максимальным и минимальным значениями угла его установки.
Для обеспечения указанной связи между движением поворота переставного стабилизатора и движением отклонения элементов механизации, предлагаемая в изобретении система содержит:
- средства соединения стабилизатора с конструкцией летательного аппарата, включающие в себя средства шарнирного крепления стабилизатора, систему управления перестановкой стабилизатора и средства передачи движения отклонения; и
- средства соединения элемента механизации со стабилизатором.
Средства шарнирного крепления стабилизатора обеспечивают установку переставного стабилизатора с возможностью поворота относительно конструкции летательного аппарата и содержат ось узла шарнирного крепления, вокруг которой стабилизатору при его перестановке сообщается движение поворота относительно летательного аппарата.
Система управления перестановкой стабилизатора создает усилия, необходимые для поворота стабилизатора относительно летательного аппарата вокруг оси указанных средств шарнирного крепления. Обычно система управления перестановкой стабилизатора содержит средства привода, которые соединяются с конструкцией летательного аппарата и которые могут представлять собой винтовой подъемник.
Средства передачи движения отклонения обеспечивают усилия, необходимые для отклонения элемента механизации.
Предлагаемая в изобретении система повышения управляемости летательного аппарата отличается тем, что для каждого положения стабилизатора по углу его установки средства передачи движения отклонения устанавливают элемент механизации стабилизатора в определенное положение по углу отклонения. Таким образом, предлагаемая в изобретении система обеспечивает связь между движением поворота стабилизатора и движением отклонения элемента механизации стабилизатора, заданную законом отклонения элемента механизации.
Средства передачи движения отклонения могут включать в себя передаточный механизм, включенный между элементом механизации стабилизатора и конструкцией летательного аппарата, что позволяет отказаться от приводов, специально предназначенных для отклонения элементов механизации. Передаточный механизм представляет собой систему механических звеньев (стержней, направляющих, зубчатых колес, кулачков и т.д.), подвижных относительно друг друга и соединенных между собой различными типами соединений (болты, пальцы и т.д.) с целью передачи движений и сил. Таким образом, в случае, если средства передачи движения отклонения по существу представляют собой передаточный механизм, включенный между элементом механизации и конструкцией летательного аппарата, предлагаемая в изобретении система обеспечивает отклонение элемента механизации стабилизатора по закону, связывающему отклонение элемента механизации с движением поворота стабилизатора при его перестановке.
Краткое описание чертежей
Для лучшего понимания технических особенностей изобретения приведенное ниже описание его осуществления поясняется чертежами, на которых показано:
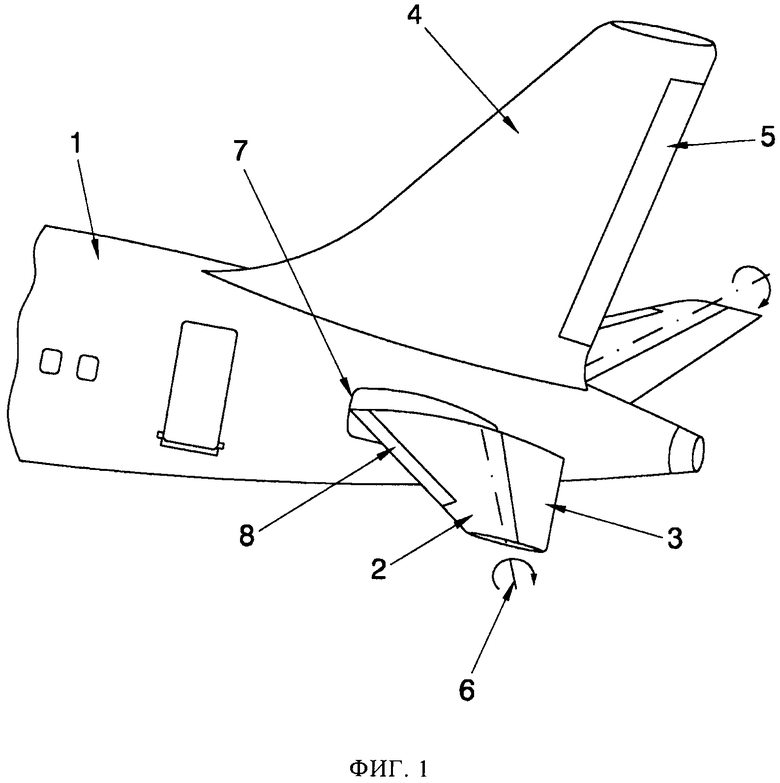
на фиг.1 - перспективное изображение первого варианта установки переставного стабилизатора в хвостовом оперении летательного аппарата с реализацией предлагаемой в изобретении системы повышения управляемости летательного аппарата;
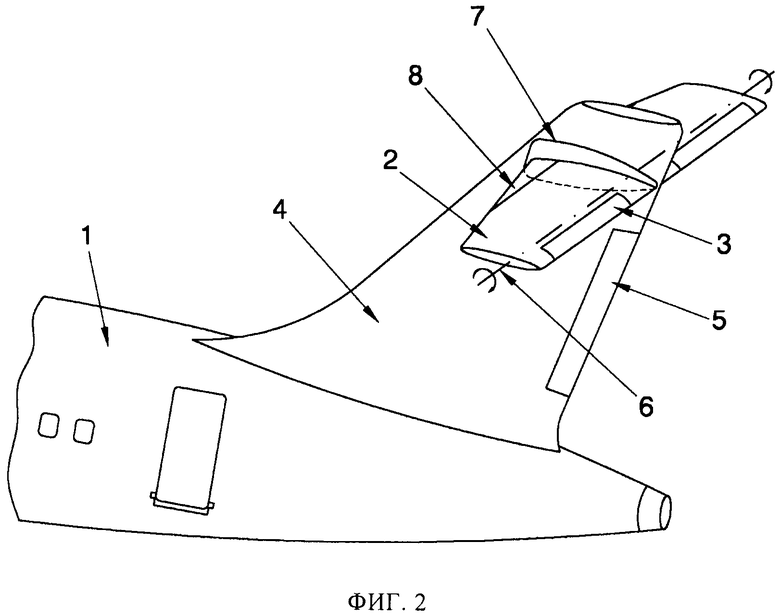
на фиг.2 - перспективное изображение второго варианта установки переставного стабилизатора в хвостовом оперении летательного аппарата с реализацией предлагаемой в изобретении системы повышения управляемости летательного аппарата;
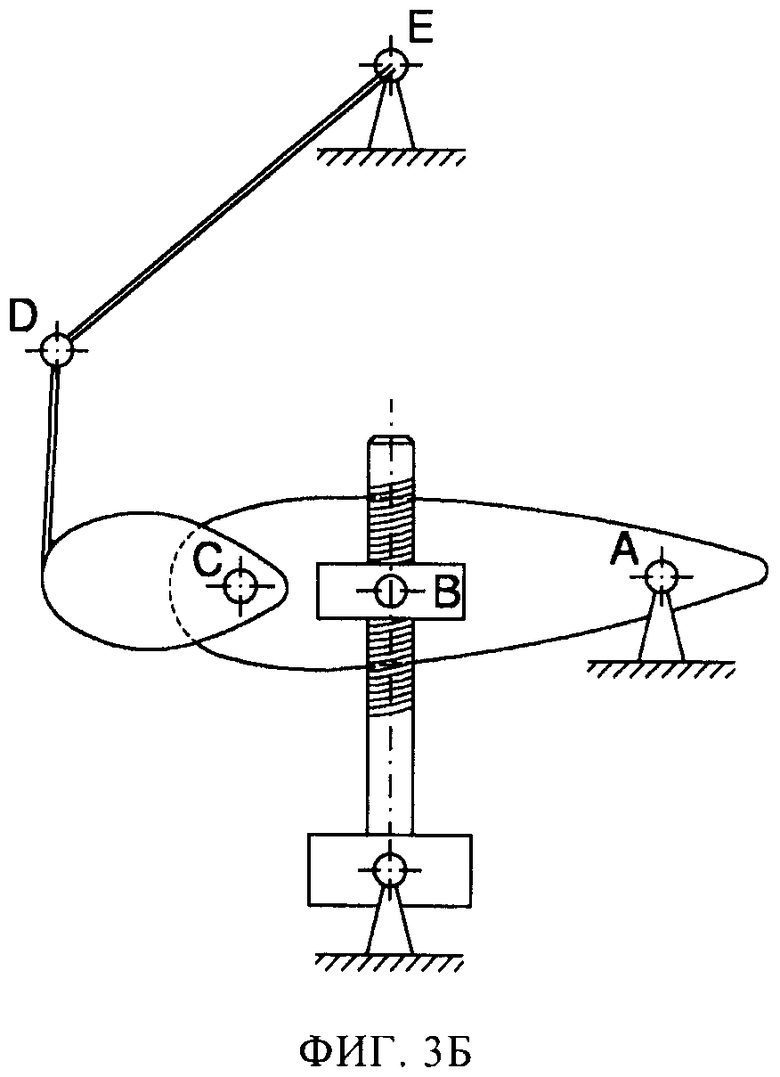
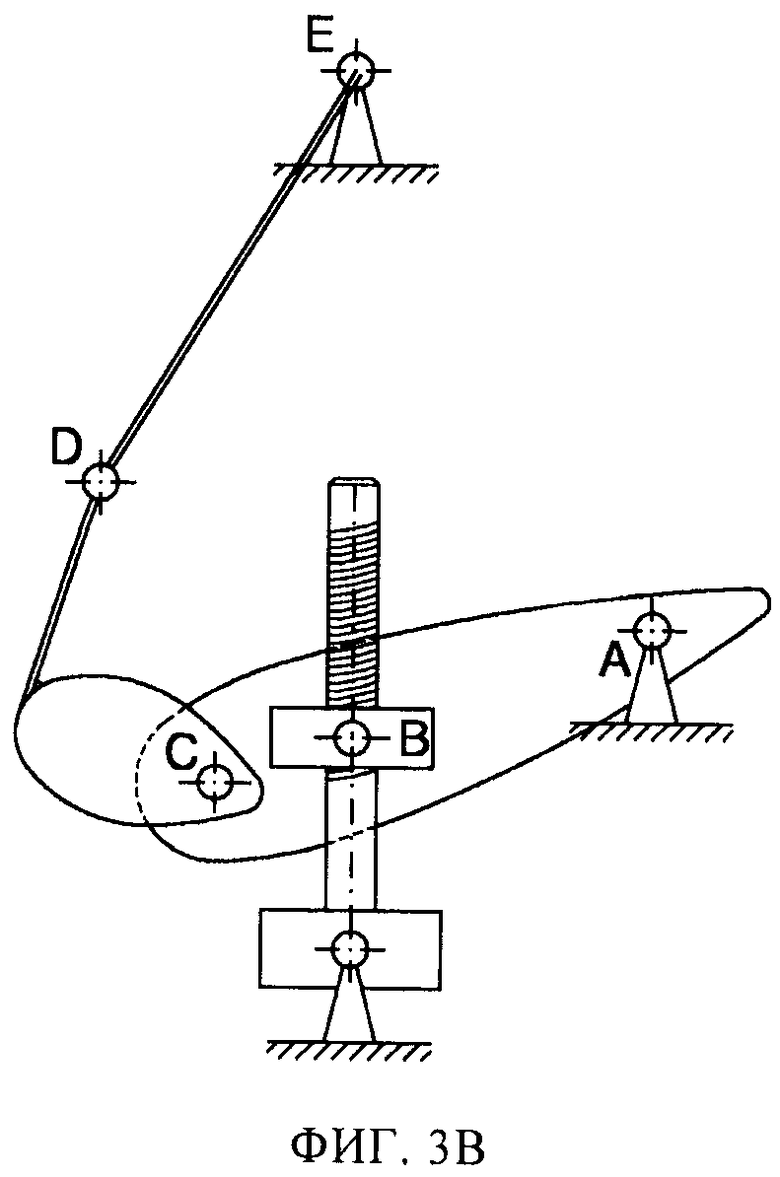
на фиг.3 - схематическое изображение одного варианта выполнения предлагаемой в изобретении системы, в котором средства передачи движения отклонения включают в себя стержневой механизм, причем штриховкой обозначены неподвижные элементы конструкции летательного аппарата, относительно которых стабилизатор поворачивается, а кружками обозначены шарнирные сочленения; на трех чертежах (фиг.3А, 3Б и 3В) представлены различные состояния системы, соответствующие различным углам установки стабилизатора с соответствующим положением элемента механизации по углу его отклонения;
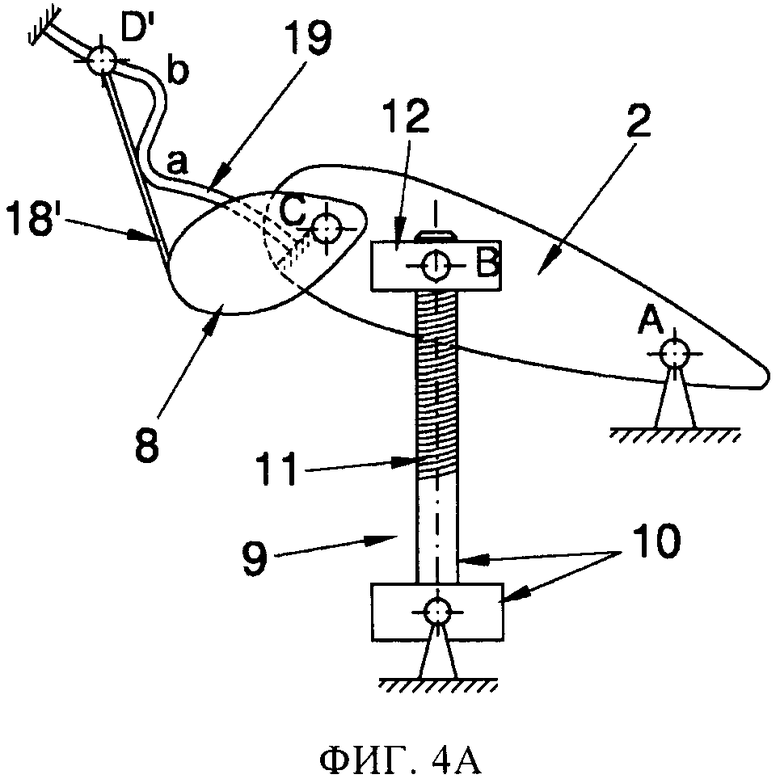
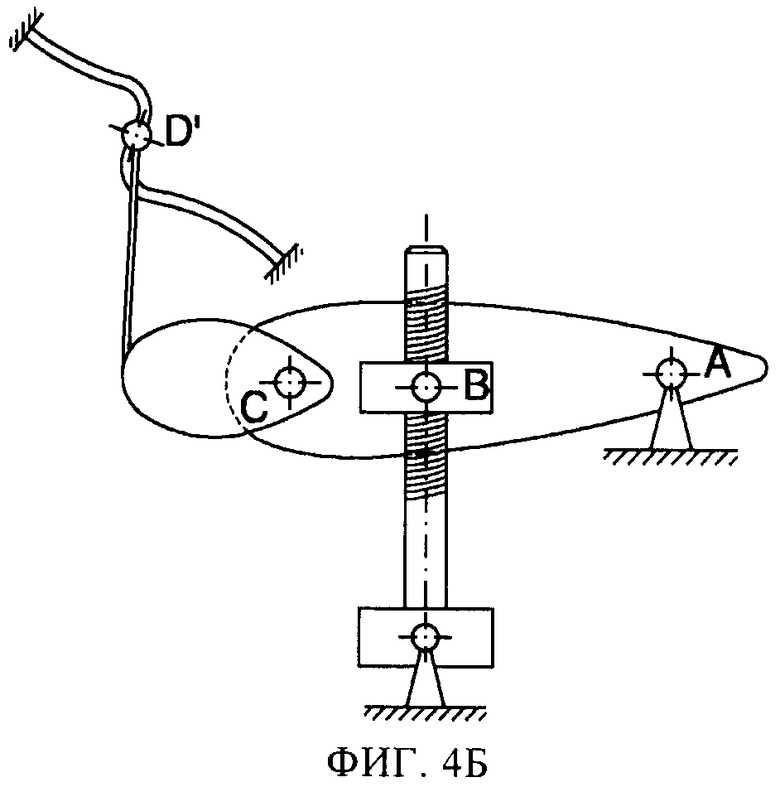
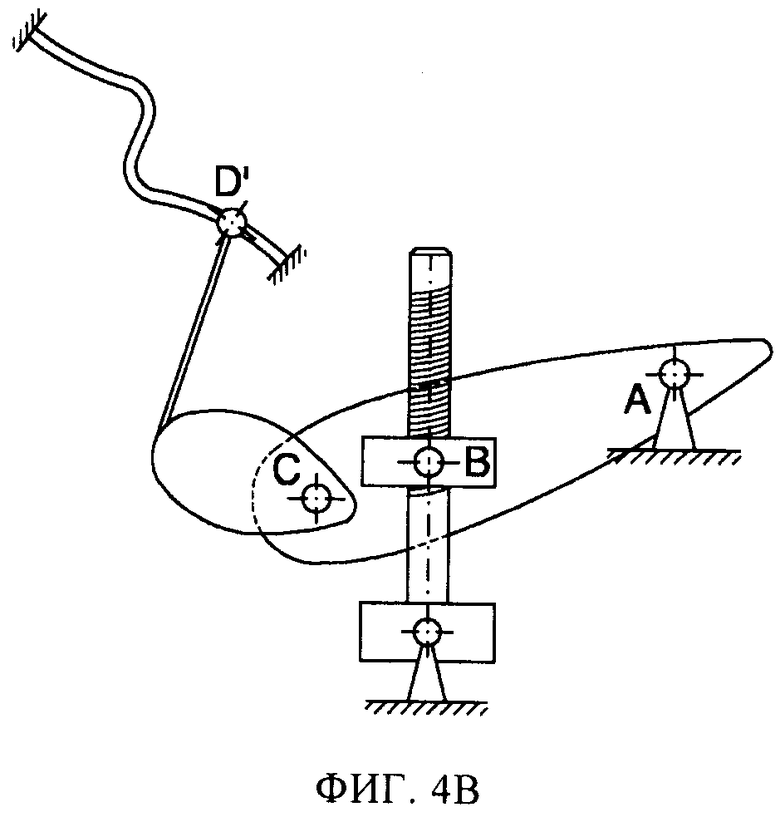
на фиг.4 - схематическое изображение еще одного варианта выполнения предлагаемой в изобретении системы, в котором средства передачи движения отклонения включают в себя механизм с направляющей, причем штриховкой обозначены неподвижные элементы конструкции летательного аппарата, относительно которых стабилизатор поворачивается, а кружками обозначены шарнирные сочленения; на трех чертежах (фиг.4А, 4Б и 4В) представлены различные положения системы, соответствующие различным углам установки стабилизатора с соответствующим положением элемента механизации по углу его отклонения;
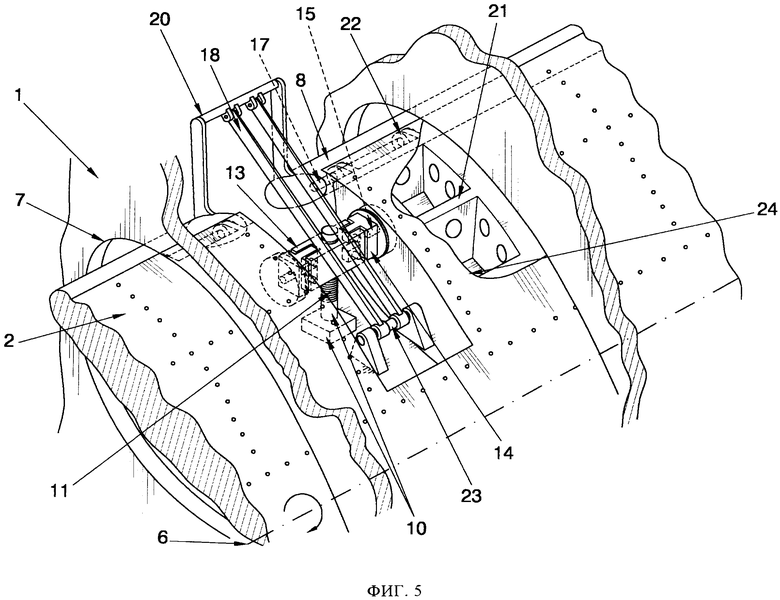
на фиг.5 - перспективное изображение предпочтительного варианта выполнения предлагаемой в изобретении системы повышения управляемости летательного аппарата.
Осуществление изобретения
Изобретение предназначено для применения на летательном аппарате, преимущественно самолете, оснащенном переставным стабилизатором 2. На фиг.1 и 2 показаны основные компоненты хвостового оперения летательного аппарата 1, состоящего из горизонтального хвостового оперения, включающего в себя стабилизатор 2 и руль 3 высоты, и вертикального хвостового оперения, включающего в себя киль 4 и руль 5 направления.
На фиг.1 и 2 показаны две различных схемы компоновки хвостового оперения с различным расположением стабилизатора 2, причем фактор расположения стабилизатора 2 не ограничивает возможностей осуществления изобретения.
На фиг.1 и 2 также показано, что половины стабилизатора 2 выступают из конструкции летательного аппарата 1 через вырезы 7, а возможность поворота переставного стабилизатора 2 относительно летательного аппарата 1 обеспечивается средствами шарнирного крепления стабилизатора. Средства шарнирного крепления включают в себя ось 6 шарнирного узла крепления стабилизатора, вокруг которой стабилизатор 2 при его перестановке поворачивается относительно летательного аппарата. Может быть предусмотрено и несколько несовпадающих шарнирных осей 6 узла крепления стабилизатора, что не ограничивает возможностей осуществления изобретения, как и конкретные геометрические характеристики стабилизатора 2 (стреловидность, поперечное V и др.).
Одна из особенностей изобретения заключается в том, что стабилизатор 2 снабжен регулируемым по положению элементом механизации. В предпочтительном варианте осуществления изобретения этот регулируемый элемент 8 механизации стабилизатора выполнен, как показано на чертежах, в виде отклоняемого носка, относящегося к механизации передней кромки стабилизатора, т.е. изобретение характеризуется тем, что средства соединения элемента 8 механизации со стабилизатором 2 включают в себя средства шарнирного сочленения, в том числе ось 17 навески элемента механизации, вокруг которой элемент механизации может поворачиваться относительно стабилизатора 2, причем отклонение элемента 8 механизации представляет собой его поворот вокруг оси 17 навески. Применение такого рода элемента 8 механизации дает то техническое преимущество, что элемент 8 механизации стабилизатора может устанавливаться под положительными и отрицательными углами поворота относительно хорды профиля стабилизатора 2, что наделяет систему большими функциональными возможностями во всем диапазоне значений угла атаки стабилизатора 2.
На фиг.3 и 4 приведены чертежи, на которых показаны варианты выполнения предлагаемой в изобретении системы, в которой кинематическая связь между движением отклонения элемента механизации и движением поворота стабилизатора 2 обеспечивается передаточным механизмом. Эти варианты предлагаемой в изобретении системы различаются типом механизма, в котором воплощены средства 16 передачи движения отклонения. На чертежах показано, что стабилизатор 2 поворачивается относительно конструкции летательного аппарата вокруг оси 6 шарнирного узла крепления стабилизатора (шарнир А), когда система 9 управления перестановкой стабилизатора, включающая в себя средства 10 привода с ходовым винтом 11 и средства 12 обеспечения возможности поворота стабилизатора, осуществляющие надлежащую передачу стабилизатору движения перестановки, перемещает средства 12 обеспечения возможности поворота стабилизатора относительно оси 6 узла шарнирного крепления и поворачивает стабилизатор 2 вокруг пальца 15 (шарнир В). За счет поворота стабилизатора система обеспечивает отклонение элемента 8 его механизации, заключающееся в повороте этого элемента вокруг оси 17 его навески (шарнир С).
Система, показанная на фиг.3, включает в себя механизм со стержнем 18, шарнирно сочлененным с конструкцией летательного аппарата 1 (шарнир Е) и со вторым стержнем 18' (шарнир D), который, в свою очередь, жестко соединен с элементом 8 механизации стабилизатора.
Система, показанная на фиг.4, включает в себя направляющий механизм, содержащий направляющую 19 и стержень 18', установленный с возможностью скольжения вдоль направляющей, шарнирно сочлененный (в шарнире D') с ней и жестко соединенный с элементом 8 механизации стабилизатора. Этот направляющий механизм, показанный на фиг.4, реализует для любого элемента механизации закон его отклонения в соответствии с геометрией направляющей 19, задающей путь скольжения стержня. В частности, в показанном на фиг.4 варианте осуществления изобретения отрезок направляющей между точками “а” и “b” проходит концентрично шарниру “А”, в результате чего при перестановке стабилизатора и движении стержня на этом отрезке направляющей отклонения элемента 8 механизации относительно хорды профиля стабилизатора 2 не происходит.
Системы, показанные на фиг.3 и 4, соответствуют двум вариантам осуществления изобретения, которыми возможности осуществления изобретения с достижением его технических эффектов не ограничиваются, поскольку применение известных из уровня техники механизмов позволяет реализовывать изобретение и в других вариантах, в которых указанные механизмы служат средствами 16 передачи движения отклонения.
Считая, что отклонение элемента 8 механизации является положительным по знаку, когда этот элемент возвышается над линией хорды профиля стабилизатора 2, а угол установки стабилизатора является положительным по знаку, когда носок стабилизатора обращен вверх относительно горизонтальной плоскости летательного аппарата 1, в предпочтительном варианте осуществления изобретения закон отклонения элемента механизации стабилизатора выбирается таким, что при положительном угле установки стабилизатора 2 относительно летательного аппарата 1 элемент его механизации в виде отклоняемого носка 8 имеет отрицательный угол отклонения. Различные положения системы показаны на соответствующих чертежах фиг.3А-3В и 4А-4В.
Предпочтительный вариант осуществления изобретения, в достаточной мере иллюстрирующий его техническую сущность, соответствует примеру, показанному на фиг.3А и 3Б. Механизм, используемый в этом варианте осуществления изобретения, выгодно отличается простотой конструкции, а также сборки и обслуживания, что является желательным с учетом сущности изобретения.
На фиг.5 приведено перспективное изображение этого варианта осуществления изобретения, технические характеристики которого описаны ниже. Показанное положение соответствует максимальному положительному углу установки стабилизатора при максимальном по модулю отрицательном угле отклонения отклоняемого носка. На чертеже показана область передней кромки установленного на летательном аппарате 1 стабилизатора 2, консоль которого выступает из фюзеляжа через вырез 7. На чертеже также показаны, посредством частичного выреза обшивки, элементы силового набора 21 стабилизатора 2, расположенные под его обшивкой 24.
Элемент 8 механизации стабилизатора, выполненный в виде отклоняемого носка, шарнирно сочленен со стабилизатором 2 посредством выступов 22 силового набора 21 стабилизатора 2. По этой причине элемент 8 механизации стабилизатора имеет ось 17 навески, поворачивающуюся относительно указанных выступов 22.
Поворот стабилизатора 2 обеспечивается посредством системы управления перестановкой стабилизатора и средств шарнирного крепления стабилизатора. Система управления перестановкой стабилизатора в рассматриваемом варианте осуществления изобретения содержит средства 10 привода, в которых используется ходовой винт 11, соединенный с элементом 13, снабженным внутренней резьбой (гайкой). Этот элемент 13 с внутренней резьбой, в свою очередь, соединен с кулаками 14, по одному на левую и правую части стабилизатора 2. Кроме того, кулаки 14 шарнирно соединены с элементами силового набора стабилизатора 2 посредством пальцев 15. На чертеже средства шарнирного крепления представлены осью 6 узла шарнирного крепления, относительно которой стабилизатор 2 поворачивается.
Таким образом, отклонение элемента 8 механизации стабилизатора, выполненного в виде отклоняемого носка, достигается в результате поворота левой и правой частей стабилизатора 2, передаваемого средствами 16 передачи движения отклонения, содержащими скобу 20 и два стержня, следующим образом: элемент 8 механизации стабилизатора, выполненный в виде отклоняемого носка жестко соединен со скобой 20, предназначенной для передачи крутящего момента на ось 17 навески элемента механизации и шарнирно соединенной с двумя стержнями 18, каждый из которых шарнирно соединен с конструкцией летательного аппарата 1 посредством оси 23.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ ОБТЕКАНИЯ КРЫЛА ПОТОКОМ ДЛЯ УЛУЧШЕНИЯ ОСНОВНЫХ ХАРАКТЕРИСТИК АЭРОГИДРОДИНАМИЧЕСКОГО УСТРОЙСТВА И САМОЛЕТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2361776C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕОБРАЗУЕМОГО В ЛЕТАТЕЛЬНЫЙ АППАРАТ, И ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ В ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2169085C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2409504C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| Комбинированная динамически-подобная аэродинамическая модель для разных видов аэродинамических испытаний | 2023 |
|
RU2808290C1 |
| САМОЛЕТ-ТРИПЛАН | 1998 |
|
RU2172706C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2645522C1 |
| ЭКРАНОПЛАН С ВОДОМЁТНЫМ ДВИЖИТЕЛЕМ | 2015 |
|
RU2582505C1 |
Изобретение относится к области авиации. Система повышения управляемости для летательного аппарата с переставным стабилизатором (2) включает средства (16) передачи движения отклонения, которые для каждого положения стабилизатора (2) по углу его установки устанавливают элемент (8) механизации стабилизатора в определенное положение по углу отклонения. Средства (18, 20, 23) передачи движения отклонения состоят из передаточного механизма, включенного между элементом (8) механизации стабилизатора и конструкцией летательного аппарата (1). Изобретение направлено на уменьшение размера стабилизатора. 11 з.п. ф-лы, 9 ил.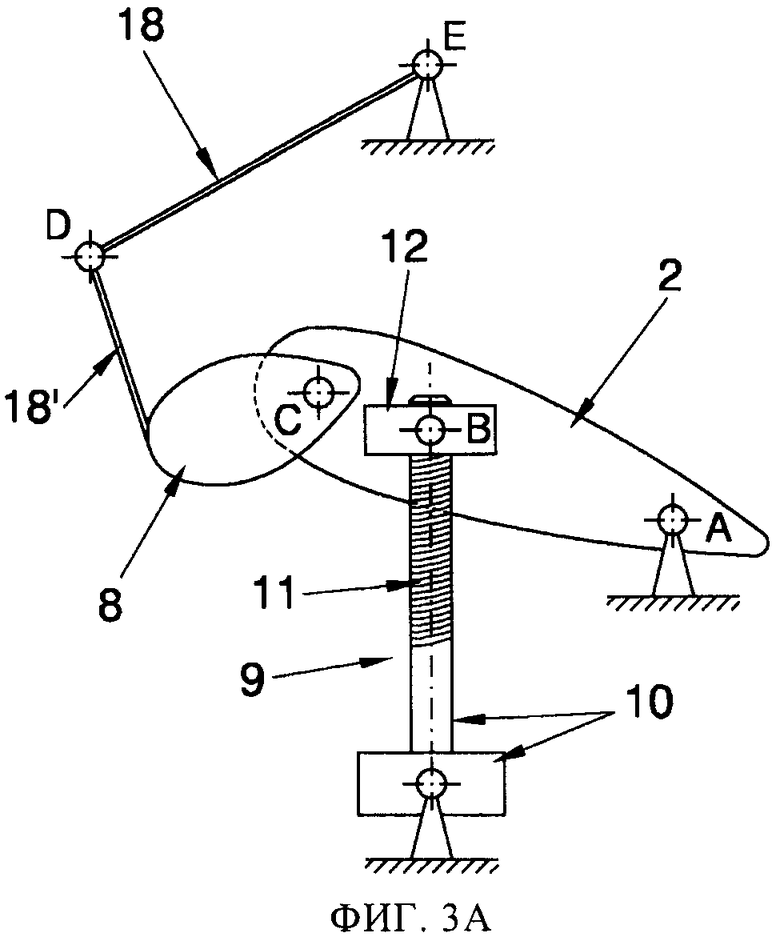
1. Система повышения управляемости для летательного аппарата (1) с переставным стабилизатором (2), содержащая:
- подвижный элемент (8) механизации передней кромки стабилизатора (2);
- средства соединения указанного элемента (8) механизации со стабилизатором (2); и
- средства соединения стабилизатора (2) с конструкцией летательного аппарата (1), включающие в себя средства обеспечения возможности поворота стабилизатора (2), в том числе средства шарнирного крепления стабилизатора (2) и систему (9) управления перестановкой стабилизатора (2);
отличающаяся тем, что средства соединения стабилизатора (2) с конструкцией летательного аппарата (1) включают в себя средства (16) передачи движения отклонения, которые для каждого положения стабилизатора (2) по углу его установки устанавливают элемент (8) механизации стабилизатора в определенное положение по углу отклонения, заданное законом отклонения.
2. Система по п.1, отличающаяся тем, что средства (16) передачи движения отклонения по существу представляют собой передаточный механизм, включенный между элементом (8) механизации стабилизатора и конструкцией летательного аппарата (1).
3. Система по п.2, отличающаяся тем, что элемент (8) механизации стабилизатора представляет собой отклоняемый носок.
4. Система по п.3, отличающаяся тем, что закон отклонения элемента механизации стабилизатора таков, что при положительном угле установки стабилизатора (2) относительно летательного аппарата (1) отклоняемый носок (8) имеет отрицательный угол отклонения.
5. Система по п.3, отличающаяся тем, что закон отклонения элемента механизации таков, что при перестановке стабилизатора (2) в интервале углов его установки, находящихся вокруг нулевого угла, отклонения элемента (8) механизации стабилизатора не происходит.
6. Система по п.4, отличающаяся тем, что средства (16) передачи движения отклонения включают в себя направляющий механизм с направляющей (19) и стержнем (18'), шарнирно (D') установленным в направляющей (19) с возможностью скольжения вдоль нее и поворота относительно нее и жестко соединенным с элементом (8) механизации стабилизатора.
7. Система по п.5, отличающаяся тем, что средства (16) передачи движения отклонения включают в себя направляющий механизм с направляющей (19) и стержнем (18'), шарнирно (D') установленным в направляющей (19) с возможностью скольжения вдоль нее и поворота относительно нее и жестко соединенным с элементом (8) механизации стабилизатора.
8. Система по п.4, отличающаяся тем, что средства (16) передачи движения отклонения включают в себя стержневой механизм с первым стержнем (18), который шарнирно (Е) соединен с конструкцией летательного аппарата (1) и шарнирно (D) соединен со вторым стержнем (18'), жестко соединенным с элементом (8) механизации стабилизатора.
9. Система по п.8, отличающаяся тем, что второй стержень (18') стержневого механизма, жестко соединенный с элементом (8) механизации стабилизатора, выполнен по существу в виде скобы (20), шарнирно соединенной с по меньшей мере одним стержнем (18), который шарнирно соединен с конструкцией летательного аппарата (1) посредством оси (23).
10. Система по одному из предыдущих пунктов, отличающаяся тем, что система (9) управления перестановкой стабилизатора включает в себя средства (10) привода и средства (12) обеспечения возможности поворота стабилизатора, соединенные между собой, причем средства (12) обеспечения возможности поворота стабилизатора шарнирно (В) соединены посредством пальца (15) со стабилизатором (2), а средства (10) привода соединены с конструкцией летательного аппарата (1).
11. Система по п.10, отличающаяся тем, что средства (10) привода включают в себя ходовой винт (11), соединенный резьбовой парой со средствами (12) обеспечения возможности поворота стабилизатора.
12. Система по п.11, отличающаяся тем, что средства (12) обеспечения возможности поворота стабилизатора содержат элемент (13), снабженный внутренней резьбой, взаимодействующей с резьбой ходового винта (11), и неподвижно соединенный с двумя кулаками (14), по одному на левую и правую части стабилизатора, с которыми шарнирно соединены соответствующие пальцы (15).
| US 4043523 A1, 23.08.1977; | |||
| ТЕПЛОВОЙ АККУМУЛЯТОР | 1997 |
|
RU2140046C1 |
| Разрезное крыло с подвижным предкрылком | 1948 |
|
SU73531A2 |

