Изобретение относится к области радиотехники и может прим жяться в системах звукозаписи и радиосвязи для уменьшения уровня шума. Цель изобретения - уменьшение нелинейных искажений. На фиг. 1 представлена структурная электрическая схема динамического гаумоподавителя; на фиг. 2 принципиальная электрическая схема возможного вьшоЛнения динамического шумоподавителя. , Динамический шумоподавитель содержит входной фильтр 1, фазовращатель 2, управляемьй элемент 3, алге раический сумматор 4 и регулятор 5, кроме того, парафазный усилитель 6. Динамический шумоподавитель рабо тает следующим образом. Входной сигнал подается на входной фильтр 1 и фазовращатель 2. При прохождении через фильтр спектральные составляющие сигнала изменяют амплитуду и фазу соответственно характеристикам входного фильтра 1. При прохождении через фазовращатель 2 амплитуда спектральных соста ляющих сигнала не изменяется, а фаза изменяется так же, как в входном фильтре 1, так как фазочастотная характеристика фазовращателя 2 выбирается идентичной фазочастотной характеристике входного фильтра 1. Соответственно напряжение сигнала, приложенное к управляемому элементу 3, будет равно арифметической разности напряжений сигнала на выходе входного фильтра 1 и фазовращателя 2, это напряжение одновременно поступает на вход алгебраи ческого сумматора 4, где сигнал уси ливается и затем подается на регулятор 5. В регуляторе 5 производится детектирование и сглаживание с оптимальными постоянными времени нарастания и спада управляющего нап ряжения, сформированное управляющее напряжение подается на управляющий вход управляемого элемента 3. В исходном состоянии, когда напряжение сигнала, приложенное к управляемому элементу 3, мало и не превосходит заданного уровня, управляемый элемент 3 находится в закрытом состоянии, которое обеспечивается подачей на его управляющий вход начального напряжения смещения с регулятора 5 При этом сигнал на выход динамического гаутюподавителя поступает тольк через входной фильтр 1 и «г.паГшение шумов, находящихся за полосой пропускания входного фильтра 1, будет максимально. Если напряжение сигнала, приложенное к управляемому элементу 3, превысит заданный уровень, то управляющее напряжение на выходе регулятора 5 изменится таким образом, что сопротивление управляемого элемента 3 уменьшится, в результате чего последний начнет шунтировать входной фильтр 1 и ослабление внеполосных составляющих сигнала уменьшится. Для обеспечения нормальной работы динамического шумоподавителя необходимо, чтобы выходное сопротивление фазовращателя 2 было значительно меньше выходного сопротивления входного фильтра 1. Подключение входов алгебраического сумматора 4 к управляемому элемгтту 3 образует отрицательную обратную связь по управляющему напряжению, так как при увеличении падения сигнала на управляемом элементе 3 в регуляторе 5 вырабатывается управляющее напряжение, уменьшающее сопротивление управляемого элемента 3, что не только расширяет полосу пропускания устройства, но и ограничивает падение напряжения на управляемом элементе 3. Отрицательная обратная связь по управляющему напряжению уменьшает искажение сигнала на выходе и улучшает точность управления полосой пропускания динамического шумоподавителя. Фазовращатель 2, обеспечивая равенство фаз сигнала в точках подключения управляемого элемента 3, позволяет снизить напряжение, приложенное к управляемому элементу 3, что особенно существенно на границе полосы пропускания входного фильтра 1, где разность амплитуд на входе и выходе входного фильтра 1 небольшая, а разность фаз значительна. Уменьшение напряжения сигнала, приложенного к управляемому элементу 3, позволяет уменьшить не только нелинейные искажения, обусловленные нелинейностью управляемого элемента 3, но и уменьшить искажения выходного сигнала, связанные с переходньми процессами регулирования, так как, чем меньше начальное напряжение сигнала, приложенное к управляемому элементу 3, тем слабее nepexoniihie процессы регулирования.
45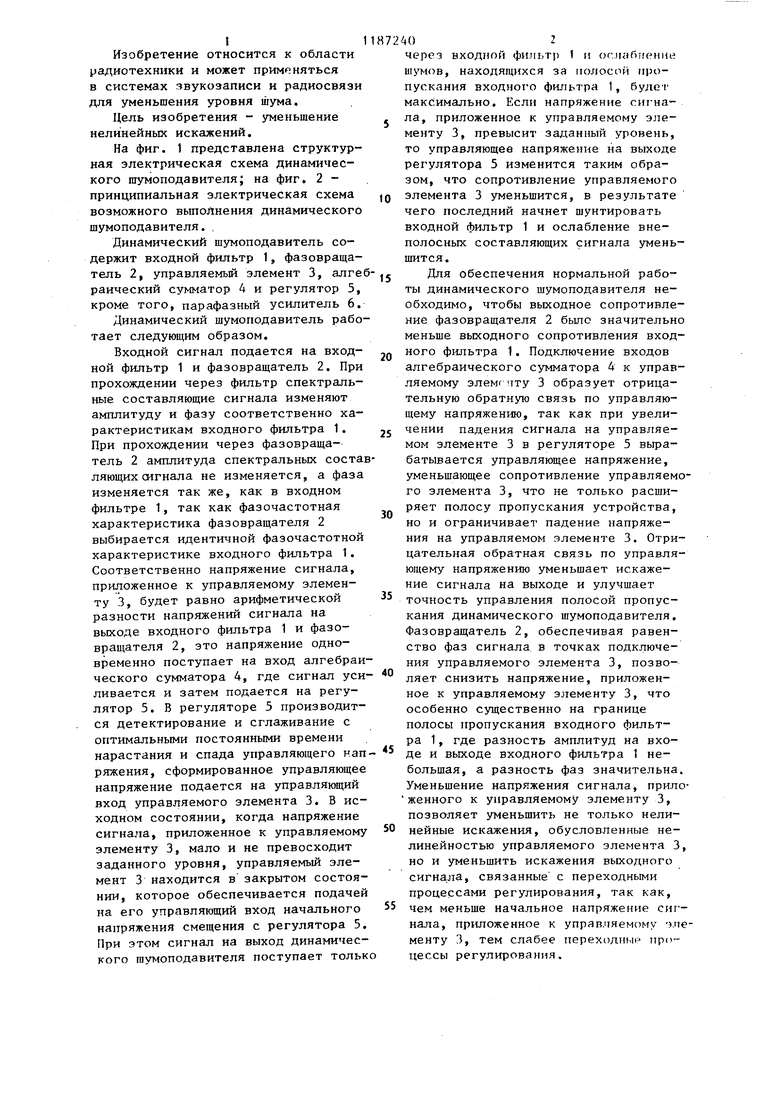
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ СООБЩЕНИЙ ЛЮБОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ, НАПРИМЕР СПОСОБ ПЕРЕДАЧИ ЗВУКОВЫХ СООБЩЕНИЙ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2326495C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ АМПЛИТУДНО-ЧАСТОТНЫХ ИСКАЖЕНИЙ ТРАКТОВ СИСТЕМ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2003 |
|
RU2234188C1 |
| Способ управления электроприводом постоянного тока | 1982 |
|
SU1150721A1 |
| Интегральный шумоподавитель для магнитофона | 1988 |
|
SU1539834A1 |
| Шумоподавитель канала магнитной записи-воспроизведения | 1990 |
|
SU1760555A1 |
| Цифровой усилитель мощности | 1982 |
|
SU1179517A1 |
| Демодулятор ЧМ-сигналов | 1987 |
|
SU1483592A1 |
| Шумоподавитель | 1983 |
|
SU1148545A1 |
| УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ПОМЕХ | 1983 |
|
SU1840214A1 |
| Шумоподавитель для тракта запись- ВОСпРОизВЕдЕНиЕ МАгНиТОфОНА | 1979 |
|
SU830524A1 |
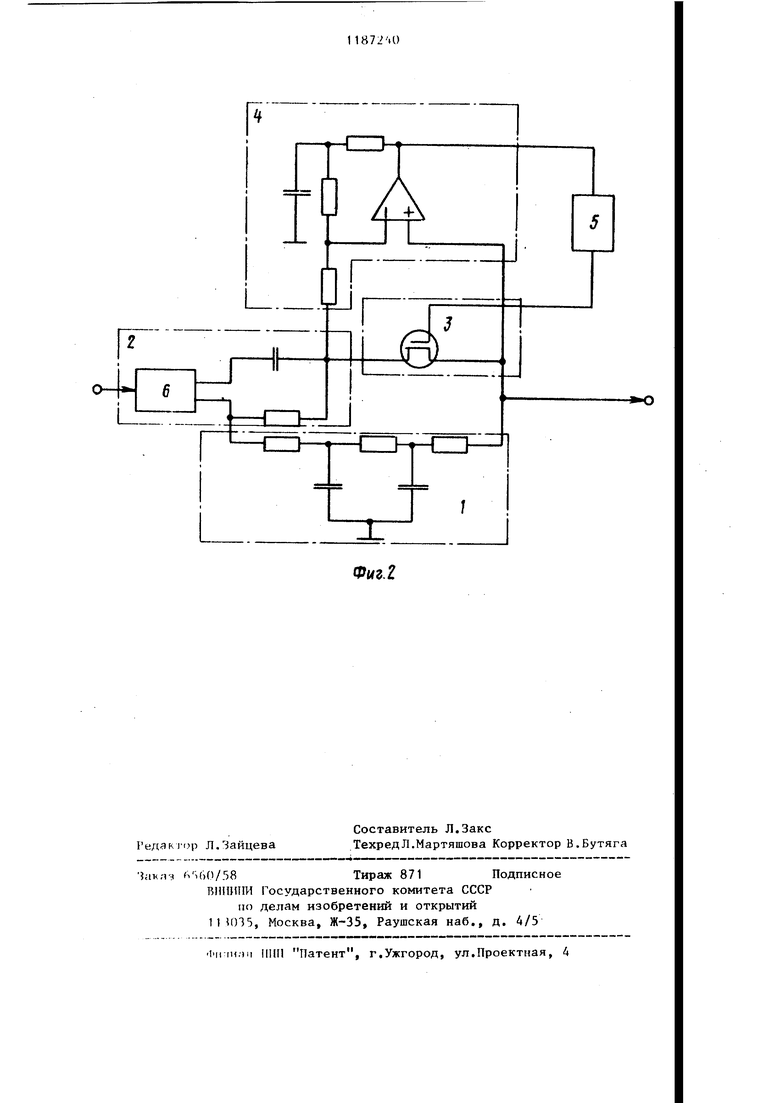
даНАМИЧЕСКИЙ ШУМОПОДАВИТЕЛЬ, содержащий последовательно соединенные входной фильтр, алгебраический сумматор и регулятор, вых которого подключен к управлякицему входу управляемого элемента, о т Личающийся тем, что, с целы уменьшения нелинейных искажений, i 1Жду входом входного фильтра и друп входом алгебраического сумматора включен фазовращатель, фазочастот я характеристика которого идентична фазочастотной характеристике вход го фильтра, а управляемый элемент включен между выходом фaзoвpaщaтeJ и выходом входного фильтра. (Л
| Динамический фильтр | 1976 |
|
SU734868A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
