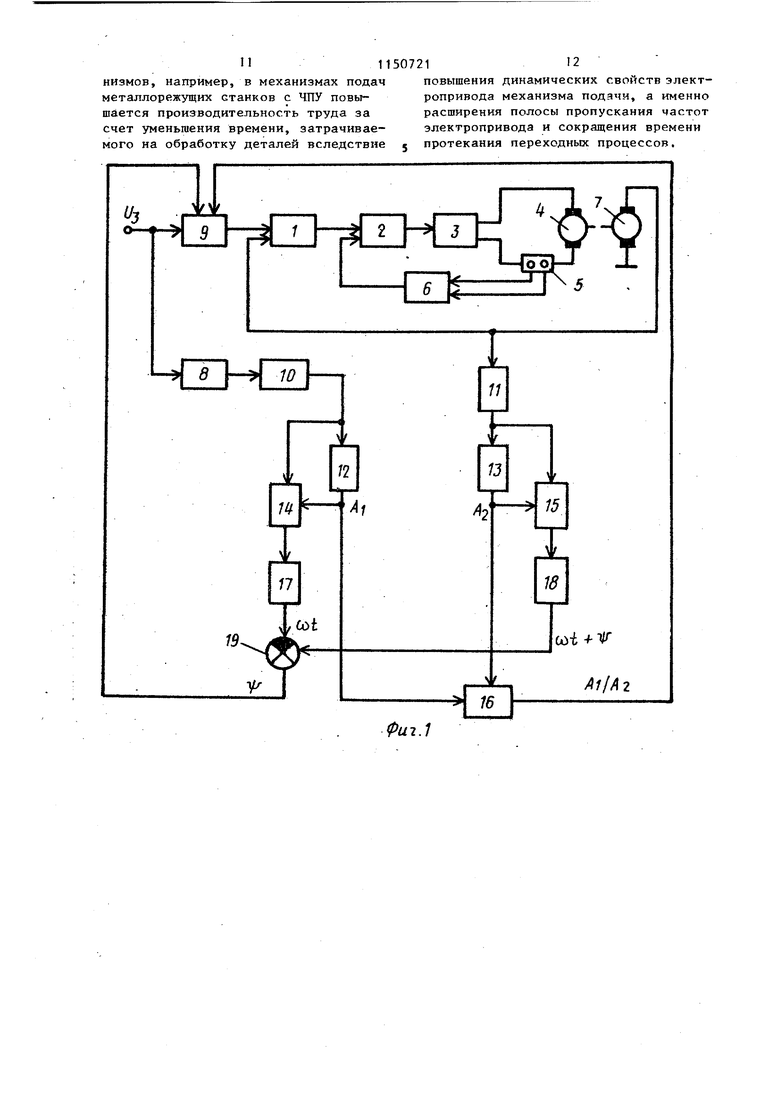
Изобретение относится к электро,технике, а именно к управлению автоматизированными электроприводами постоянного тока и предназначено для быстродействующих электроприводов механизмов подач металлорежущих стан ков с устройством числового программного управления. Известен способ упреждающей коррекции в быстродействукяцем электроприводе постоянного тока, заключающийся в том, что производят сравнени напряжений с выхода эталонной модели формирующей заданные динамические характеристики электропривода и выходного напряжения электропривода (скорости электродвигателя), а также формирование напряжения обратной свя зи корректирующим устройством в зави симости от величины ошибки между упомянутыми напряжениями, которое поступает на выход соответствующего регулятора системы электропривода постоянного тока как отрицательная обратная связь m. Недостатком известного способа яв ляются низкие динамические показател а именно малая величина полосы пропускания частот электропривода. Это объясняется тем, что происходит опре деление ошибки регулирования в элект роприводе (ошибки между напряжением с выхода эталонной модели и вьпсодньм напряжением тахогенератора (ратчика частоты вращения э,чектропривода) , которая при гармоническом входном напряжении не разделяется на составные части, т.е. была ли ошибка в элек роприводе по фазе (сдвиг по фазе выходного гармонического напряжения датчика частоты вращения электропривода) или по амплитуде (уменьшение амплитуды гармонического напряжения датчика частоты вращения электропривода по сравнению с амплитудой входного гармонического напряжения). При этом в динамических режимах в электроприводе постоянного тока с наличие различных нелинейностей, ухудшающих динамические свойства электропривода увеличивается ошибка регулирования, которая приводит к увеличению компенсирующего напряжения, поступающег на один из регуляторов электропривод Однако это компенсирующее напряжение rie определяет, какая ошибка регулирования бьша в электроприводе (по амплитуде или по фазе), а является 212 интегральной величиной этих двух ошибок регулирования при гармоническом заДаюп1ем напряжении. И ошибка регулирования в системе электропривода при таком способе уменьшается незначительно. При этом в электроприводе могут возникнуть субгармонические колебания скорости и тока, или система электропривода будет вообще неустойчива из-за того, что на один из регуляторов подается большой компенсирующий сигнал, который не приводит к компенсации динамической ошибки в электроприводе. Для исключения в электроприводе субгармонических колебаний будут занижены динамические свойства электропривода, т.е. будет существенно уменьшена предельная полоса пропускания частот. Известен также способ управления системой электропривода с эталонной моделью, заключающийся в том, что сравнивают напряжение с выхода эталонной модели и напряжение обратной связи и в функции ошибки регулируют коэффициент усиления в системе электропривода с помощью корректирующего устройства 2, Недостатком данного способа управления являются также низкие динамические свойства электропривода постоянного тока, а именно малая величина полосы пропускания частот. Это объясняется следующим. В данном способе осуществляется сравнение выходного напряжения эталонной модели и выходного напряжения датчика скорости и при несоответствии упомянутых напряжений в электроприводе постоянного тока увеличивается коэффициент усиления. Однако при входном гармоническом напряжении не определяется была ли ошибка в системе электропривода фазовая или амплитудная, т.е. был ли большой фазовый сдвиг в фазочастотНой характеристике электропривода или была большая амплитудная ошибка в амплитудночастотной характеристике электропривода. Это ведет к тому, что в электроприводе при больших фазовых или амплитудных ошибках резко увеличивается коэААицйент усиления. Но ошибка регулирования в системе элект ропривола уменьшается незначительно из-за того, что ПРИ гармоническом задающем напряжении наблюдается большой Аазовый слвиг гармонического напояжения тахогенепатооа (особенно при больших частотах запающего напр жения) , а по известному способу он не опрепеляется. Значительное увели чение коэААициента усиления может привести к возникновению субгармонических колебаний скорости и тока при наличии в электроприводе вентил ного преобразователя (управляемого выпрямителя или широтно-импульсного преобразователя), а также вывести систему электропривода за границы устойчивости. Все это приводит к необходимости существенного ограничения коэффициента усиления в элект роприводе для устранения указанных явлений и к занижению Предельных динамических показателей электропри вода постоянного,тока, а именно к сужению полосы пропускания частот электропривода. Наиболее близким к изобретению по технической сущности является способ управления электроприводом постоянного тока с гармоническим задающим сигналом, согласно котором определяют желаемый переходный процесс электропривода с помощью ег модели, измеряют амплитуды переменн .составляющих напряжений на выходе модели и пропорционального частоте вращения электропривода, определяют отношение указанных амплитуд,, измеряют фазы переменных составляющих напряжения на выходе модели и напря жения, пропорционального частоте вр щения электропривода, и сравнивают их, определяя фазовьй сдвиг з. Недостатком известного способа управления также являются невысокие динамические свойства электропривод а именно малая величина полосы пропускания частот. Это объясняется тем, что регулирование частотных характеристик по данному способу производится с помощью регулятора только в нескольких точках частотно характеристики, а это не позволяет плавно и на всех частотах входного гармонического сигнала стабилизировать частотную характеристику элект ропривода постоянного тока. Цель изобретения - улучшение дин мических показателей путем расширен полосы пропускания частот электропр вода. Указанная цель достигается тем, что согласно способу управления эпект роприводом постоянного тока с гармоническим задающим сигналом, по которому определяют желаемый переходной процесс электропривода с помощью его модели, измеряют амплитуды переменных составляющих напряжений на выходе модели и пропорционального частоте вращения электропривода, определяют отношение указанных амплитуд, измеряют фазы переменных составляющих напряжений на выходе модели и напряжения, пропорционального частоте вращения элект ропривода, сравнивают их, определяя фазовый сдвиг, дополнительно определяют амплитуду переменной составляющей задающего напряжения и при отношении упомянутых амплитуд напряжений меньшем единицы уменьшают, а при отношении амплитуд большем единицы увеличивают амплитуду переменной составляющей задающего напряжения пропорционально указанному отношению, а также сдвигают фазу переменной составляющей задающего напряжения в сторону опережения на величину фазового сдвига между переменными составляющими напряжений. На фиг. 1 изображена функциональная схема устройства, реализуюшего способ} на Фиг. 2 - функциональная схема блока коррекции. Устройство (Лиг. 1) содержит последовательно соединенные регулятор 1 частоты вращения, регулятор 2 тока, тиристорный преобразователь 3, электродвигатель А, последовательно с якорем которого включен шунт 5, выходом соединенный с датчиком 6 тока, подключенным к второму входу регулятора 2 тока, датчик 7 частоты вращения, установленньм на валу электродвигателя А и подключенный к второму входу.регулятора 1 частоты вращения, эталонную модель 8, входом соединенную с входом электропривода, блок коррекции 9, дифференцирующие звенья 10 и 11, формирователи 12 и 13 амплитуды, блоки деления 14-16, функциональные преобразователи 17 и 18, сумматор 19, причем выход эталонной модели 8 подключен к входу первого дифференцирующего звена 10, выходом соединенного с входом формирователя 12 амплитуды и с входом блока 14 деления,,второй вход которого соединен с выходом формирователя 12 амплитуды, выход ёлока 14 деления подключен к входу функционального преобразователя 17, выход которого соединен с первым входом сумматора 19, выходом подключенного к первому управляющему входу блока 9 коррекции, второй вход сумматора 19 соединен с выходом функционального преобразователя 18, вход которого подключен к выходу блока 15 деления, первым входом соединенного с выходом дифференцирующего звена 11, а входом
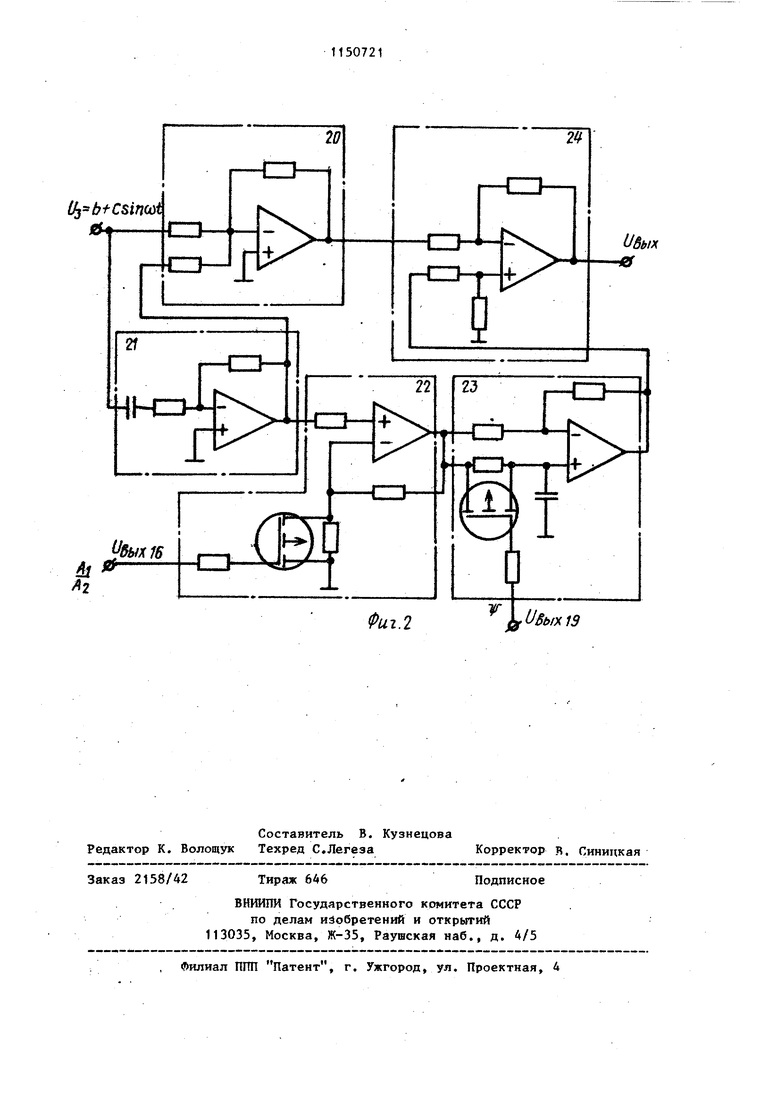
с выходом формирователя 13 амплитуды, вход которого соединен с выходом дифференцирующего звена 11, входом соединенного с выходом датчика 8 частоты вращения, выход формирователя 15 13 амплитуды подключен к первому входу блока 16 деления, к второму входу которого подключен выход формирователя 12 амплитуды, а выход блока 16 деления соединен с вторым управляющим входом блока 9 коррекции, вход которого подключен к выходу электропривода, а вход к входу регулятора 1 частоты вращения. Блок 9 коррекции состоит из инвертирующего усилителя 20, дифференцирующего звена 21, усилителя 22 с переменным коэффициентом усиления, фазовращателя 23 и сумматора 24, причем выход инвертирующего усилителя 20 подключен к первому входу сумматора 24, к второму входу которого подключены последовательно соединенные дифференцирующие звено 21, усили тель 22 с переменным коэффициентом усиления и фазовращатель 23, выход дифференцирующего звена подключен также к второму входу инвертирующего усилителя 20. Устройство работает следующим образом. Последовательно соединенные регулятор 1 частоты вращения, регулятор 2 тока, тиристорный преобразователь электродвигатель 4, последовательно с якорем которого включен шунт 5, выходом соединенный с датчиком 6 тока, подключенного к второму входу регулятора 2 тока, датчик 7 частоты .вращения, установленный на валу электродвигателя 4 и подключенньй к второму входу регулятора 1 частоты вращения,образуют двухконтурную систему с подчиненным регулированием параметров. Задяняцее напряжение,-поступающее на вход системы электропривода посто янного тока, подается также на вход 1
напряжении эталонной модели 8. Данное напряжение можно представить в виде А, е«п(со), т.е. как синусоидальную составляющую. Это напряжение
деления. На выходе блока 14 деления формируется напряжение вида sin (wi) синусоидальная составляющая выходного напряжения эталонной модели 8 216 эталонной модели 8, которая формирует эталонную динамическую характеристику электропривода и также амплитуднофазовую характеристику (АФХ) с заданной полосой пропускания частот и заданным показателем колебательности Выходное напряжение эталонной модели 8 поступает на дифференцирующее звено 10, осуществляющее вьщеление переменной составлякяцей в выходном поступает на вход формирователя 12 амплитуды и на вход блока 14 деления. Формирователь 12 амплитуды формирует амплитуду выходного напряжения дифференцируницего звена 10, т.е. выделяет модуль этого напряжения. Если входное напряжение формирователя амплитуды (wi), то его выходное напряжение будет А, . Напряжение с выхода формирователя 12 амплитуды поступает на входы блоков 1Д и 16 в относительных единицах, т.е. независимо от амплитуды выходного напряжения эталонной модели 8. Напряжение с выхода блока 14 деления поступает на вход функционального преобразователя 17, имеющего арксинусную характеристику и формирующего напряжение вида w-fc , которое поступает на вход сумматора 19. С выхода датчика 7 частоты вращения напряжение пЬступает на вход дифференцирующего звена 11, осуществляющего ш щеление переменной составляющей в выходном напряжении датчикачастоты вращения. Данное напряжение можно представить в виде A-j sin (w + t)). Оно поступает формирователя 13 амплитуды и на вход блока 15 деления. Формирователь 13 амплитуды формирует амплитуду выходного напряжения дифференцирукяцего звена 11, т.е. вьщеляет модуль этого напряжения. Если на вход его поступает напряжение в виде AJ 9tn (л1 (}), то выходное напряжение будет А . Напряжение с выхода формирователя 13 амплитуды поступает на входы блоков 15 и 16 деления. На выходе блока 15 деления формируется напряжение в виде Stn (tji.-K; ) синусоидальная составляющая выходного напряжения датчика частоты вращения в относительных единицах, т.е. независимо от амплитуды Aj напряжения датчика частоты вращения Напряжение с выхода блока 15 деления поступает на вход функционального преобразователя 18, имеющего арксинусную Характеристику и формирующего напряжения вида (со{ + Ц| ) . Данное напряжение, поступает на второй вход сумматора 19 и на его выходе формируется ; напряжение видад; , пропорциональное фазовой ошибке (фазовому сдвигу в электроприводе на определенной частоте), показывающее расхождение фазочастотной характеристики электропривода постоянного тока по сравнению с эталонной фазочастотной характеристикой, которая формируется эталонной моделью 8. Напряжение с вьгхода сумматора 19 поступае на управляющий вход блока 9 коррекции. На первый вход блока 16 деления поступает напряжение Д) с выхода формирователя .12 амплитуды, а на второй вход поступает напряжение Д с выхода формирователя 13 амплитуды При этом на выходе блока 16 деления А формируется напряжение вида -j-, пропорциональное амплитудной ошибке, показьтаюп1ее во сколько раз изменяется амплитуда в амплитудно-частотно характеристике электропривода по сравнению с эталонной амплитудой в амплитудно-частотной характеристике которая формируется эталонной моделью 8. Напряжение с выхода блока 16 деления поступает на второй управ ляющий вход блока 9 коррекции. В бло ке коррекции происходит регулировани амплитуды и фазы переменной составляющей задакнцего напряжения всего электропривода постоянного тока. Происходит это следующим образом. I Пусть задающее напряжение электро привода можно представить в виде В + С- gin ((«){;), т.е. как сумму посто янной составляющей В и переменной синусоидальной составляющей С 5in coi Тогда на выходе дифференцирующего звена 21, осуществляющего выделение переменной составляющей, будет напряжение вида Csiooji, которое поступает на вход инвертирующего усилител 20, на выходе которого будет присутствовать лишь постоянная ,составляющая задающего напряжения электропривода, а именно величина В. Данное напряжение поступает на вход сумматора 24, на второй вход которого подается скорректированное напряжение переменной составляющей задаюп1его напряжения электропривода через усилитель 22 с переменным коэффициентом, усилитель и фазовращатель 23. Переменная составляющая задающего напряжения Csincot с выхода дифференцирующего звена 21 поступает на,вход усилителя 22 с переменным коэффициентом усиления, управление коэффициентом усиления которого осуществляется напряжением вида т-, поступающим с блока 16 деления. Выходное напряжение усилителя 22 можно представить в виде С T-sinui;, которое поступает AI на фазовращатель 23, осуп1ествляющий сдвиг по фазе задающего напряжения в функции управляющего напряжения вида V , поступающего с выхода сумматора 19. При этом выходное напряжение фазовращателя в первом приближении можно записать в виде С-- in (ы1-1). Выходное напряжение сумматора 24 можно записать в виде В+С-т- (wt ), т.е. на выходе сумматора 24, выход которого является выходом блока 9 коррекции, формируется напряжение, I пбстоянная составляющая которого не изменяется, а переменная синусоидальная составляющая корректируется как по амплитуде, так и по фазе, причем на величины, пропорциональные амплитудной ошибке и фазовой ошибке в электроприводе. Допустим, в быстродействующем электроприводе.постоянного тока имеются различного вида нелинейности, ухудшающие динамические свойства, а именно сужающие полосу пропускания частот и увеличивающие показатель колебательности в электроприводе (, насыщение регуляторов частоты вращения и тока, кривая нелинейного токоограничения для высокомоментного электродвигателя, зона нечувствительности в характеристике полупроводникового преобразователя, наличие нелинейности, связанной с режимом прерьгеистых токов в преобразователях с раздельным управлением, наличие нелинейного момента сухого трения в электродвигателе и т.д.) и на вход электропривода пода ется напряжение гармонической формы Причем полоса пропускания частот быстродействующего электропривода, постоянного тока для электроприводо механизмов подачи металлорежущих станков с ЧПУ оценивается по двум условиям: уменьшение амплитуды напряжения на выходе датчика частоты вращения на 0,7 от амплитуды этого же напряжения на частоте 0,5 Гц или .что однозначно, уменьшение коэффициента усиления зшчкнутого электропривода на 3 дБ и наличие в системе электропривода фазового сдвига межд задающим гармоническим напряжением и напряжением с выхода датчика част ты вращения 90 , т.е. полоса, пропус кания частот в быстродействующем электроприводе будет максимальной, если одно из указанных условий достигнет своего предельного значения В электроприводе с наличием различн го вида нелинейностей происходит изменение амплитудно-фазовой характеристики электропривода, т.е. изме нение величины амплитуды выходного напряжения датчика 7 частоты вращения по сравнению с задаюп{им напряжением и наличие фазового сдвига между указанными напряжениями. При этом на выходе формирователей 12 и 13 амплитуды формируются амплитуды напряжений эталонной модели 8 и датчика частоты вращения 7 и на бло 16 деления формируется напряжение, пропорциональное отношению этих .величин, и данным напряжением проис ходит изменение коэффициента усилен усилителя 22, который регулирует ам литуду переменной составлякяцей, пос тупающей на вход электропривода. Допустим, что в электроприводе .постоянного тока произошло сужение полосы пропускания - резко уменьшилась амплитуда напряжения датчика частоты врар1ения. При этом уменьшается и величина амплитуды напряжени А, поступающая с формирователя 13 амплитуды, и.на выходе блока 16 деления возрастает напряжение в связи, с тем, что величина амплитуды напряжения с выхода эталонной модели 8, т.е. напряжение вида , не меняется. Возросшее напряжение, блока 16 деления увеличивает коэффициент усиления усилителя 22, который увеличивает амплитуду переменной составляющей, поступающей на вход электропривода. В электроприводе возрастает при этом амплитуда напряжения с датчика частоты вращения и происходит расширение полосы пропускания частот. Допустим, в электроприводе уменьшилась полоса пропускания частот из-за большого фазового сдвига между задающим напряжением и напряжением датчика 7 частоты вращения. При этом на выходе сумматора 19 формируется напряжение, пропорциональное данному фазовому .сдвигу (f , которое поступает на управляющий, вход фазовращателя 23, осуществляющего сдвиг по фазе переменной, составляющей входного напряжения, поступающего на вход регулятора 1 частоты вращения электропривода. И в этом случае происходит сдвиг по фазе напряжения гармонической формы на выходе датчика 7 частоты вращения и, тем самым, уменьшается фазовый сдвиг между напряжением датчика частоты вращения и задающим напряжением. В электроприводе происходит расширение полосы пропускания частот и улучшение динамических свойств. Электропривод, выполненный по предлагаемому способу управления, имеет высокие динамические показатели, причем полоса пропускания частот определяется заданной полосой пропускания частот эталонной модели (параметрами эталонной модели) и предельными динамическими возможностями силовой части быстродействующего электропривода (тиристорный преобразователь-электродвигатель) . Полоса пропускания частот может достигать граничной (согласно теореме Котельникова) и равной -, где m - число фаз, Г - частота питакицей сети. Применение предлагаемого способа управления в быстродействующих электроприводах постоянного тока и устройства для его осуществления приводит к повьш ению производительности механизмов, например, в механизмах подач металлорежущих станков с ЧПУ повышается производительность труда за счет уменьшения времени, затрачиваемого на обработку деталей вследствие CD-F
повышения динамических свойств электропривода механизма подачи, а именно расширения полосы пропускания частот электропривода и сокращения времени протекания переходных процессов.
(pui.1 (i-tAll к г U b-f-Csin t ef LOSbfXiS Фиг.2




| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2024 |
|
RU2832922C1 |
| Самонастраивающаяся система регулирования скорости | 1981 |
|
SU1007083A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1239819A1 |
| Следящий рулевой электропривод | 2022 |
|
RU2800527C1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Электропривод переменного тока | 1985 |
|
SU1359881A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2014722C1 |
СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА с гармоническим задающим сигналом, согласно , которому определяют жёлаемьй переходный процесс электропривода с помощью его модели, измеряют амплитуды .переменных составляющих напряжений на выходе модели и пропорционального частоте вращения электропривода, определяют отношение указанных амплитуд, измеряют фазы переменных составляющих напряжения на вых.оде модели и напряжения, пропорционального частоте вращения,электропривода, сравнивают их, определяя фазовый сдвиг, отличающийся тем, .что, с целью улучшения динамических показателей путем расширения полосы пропускания частот электропривода, дополнительно определяют амплитуду (Л переменной составляннцей задающего, с напряжения и при отношении упомянутых амплитуд напряжений . меньшем единицы уменьшают, а при отношении амплитуд большем единицы увеличивают амплитуду переменной составляющей задающего напряжения пропорционально указанСП ному отношению, а также сдвигают фазу о го переменной составляющей задающего напряжения в сторону опережения на величину фазового сдвига между переменными составляющими напряжений.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Боровиков М.А., Ннешин А.П | |||
| Способ коррекции систем автоматического регулирования | |||
| - Электричество, 1972, № 9, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Под ред | |||
| В.В.Солодовникова, кн | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Мяльно-трепальный станок | 1921 |
|
SU314A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Управление электроприводами | |||
| Учебное пособие для вузов, Л., Энергоиздат, 1982, с | |||
| УСТРОЙСТВО ПАРОПЕРЕГРЕВАТЕЛЯ | 1920 |
|
SU295A1 |
