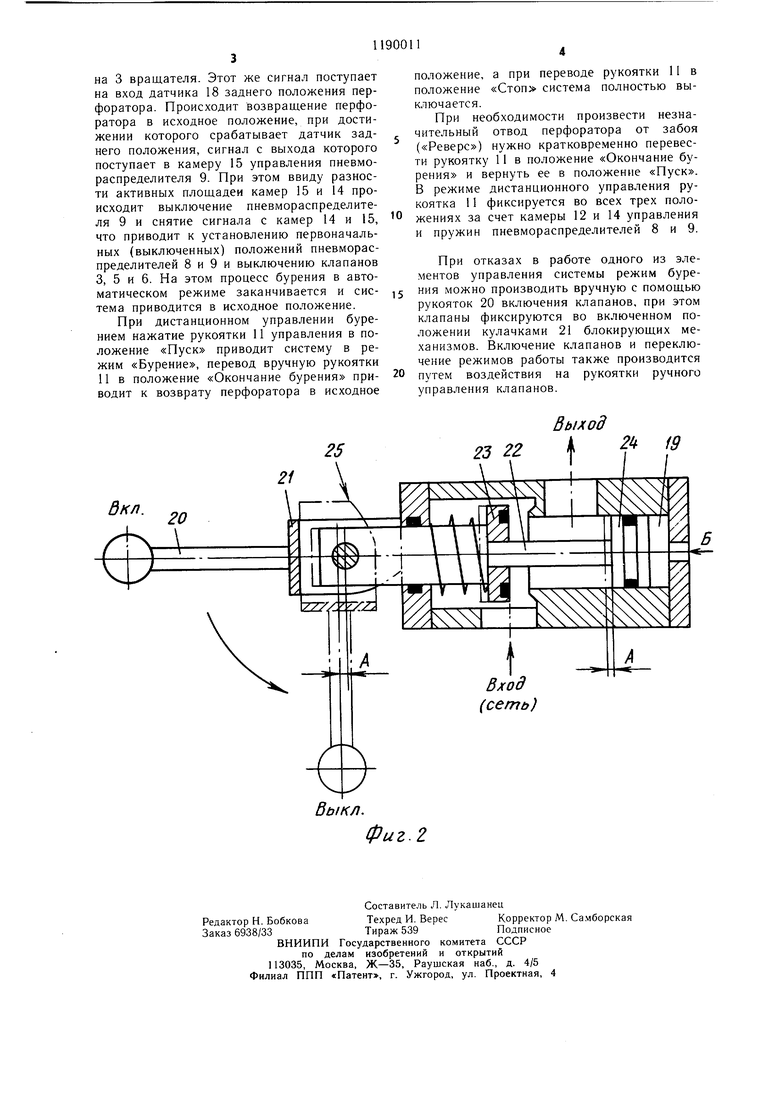
Изобретение относится к системам управления горными машинами, в частности бурильными установками и является усовершенствованием известного по авт. св. № 1055862. Цель изобретения - оперативное изменение режимов бурения. На фиг. 1 изображена система автоматического и дистанционного управления бурильным агрегатом; на фиг. 2 - конструкция клапана. Система автоматического и дистанционного управления бурильным агрегато.м содержит клапаны 1-6 включения промывки шпура, ударника перфоратора, вращателя nepcJDOpaTopa, прямой подачи, реверса подачи и продувки шпура соответственно, блок 7 питания, 1 одпружиненные пневмораспределители 8 и 9, соединенные при помоши коромысла 10 .между собой и с рукояткой 11 управления и имеющие по две камеры 12 и 13, 14 и 15 управления, разделительный клапан 16, датчики переднего 17 и заднего 18 положения перфоратора на податчике. Выход из пневмораспределителя 8 соединен с камерой 12 управления, с клапанами 1, 2, 4 и через разделительный клапан 16 с клапаном 3 включения вращателя. Выход пневмораспределителя 9 соединен с камерой 14 управления, с клапанами 6 и 5, через разделительный клапан 16 - с клапаном 3 включения вращателя и входом датчика 18 заднего положения иерфоратора. Выход датчика 18 заднего положения перфоратора соединен с камерой 15 управления пневмораспределителя 9. Вход датчика 17 переднего положения перфоратора соединен с блоком 7 питания, а выход - с камерой 13 управления пневмораспределителя 8. Каждый клапан 1-6 включения приводов бурильной мащины, имеет камеру 19 управления от соответствующих пневмораспределителей (8 или 9) и рукоятку 20 включения с блокирующим механизмом, который позволяет фиксировать рукоятку во включенном состоянии при помощи кулачка 21. Рукоятка 20 с кулачком 21 посредством тяги 22 воздействуют на запорный элемент 23 клапана. Эта же тяга 22 соединена с поршнем 24 камеры 19 управления клапана. Рабочий ход кулачкового механизма (эксцентриситет) включения клапана меньше рабочего хода поршня 24 в камере 19 управления при подаче в последнюю сигнала управления от соответствующего пневмораспределителя. Рукоятка 20 с кулачковым механизмом 21 имеет либо привод принудительного возврата в выключенное положение при подаче сигнала .в камеру управления клапана, либо возвращается под действием собственного веса при горизонтальном включенном положении. Для фиксации рукоятки 20 во включеном положении кулачок 21 имеет площаду 25. Система работает следующим образом. Для произведения забуривания буровоо инструмента необходимо при помощи укояток 20 управления клапанов включеия промывки 1, вращателя перфоратора 3 ключить указанные клапаны до фиксации улачкового механизма 21 этих клапанов, алее вести забуривание рукоятками клапаов включения ударника 2 и подачи 4, егулируя этими рукоятками энергию дара и скорость подачи перфоратора, при оторых забуривание протекает без соскальывания бурового инструмента и изгибов уровой штанги. По окончании забуривания на необходимую глубину рукоятки этих клапанов также переводятся в зафиксированное включенное положение, после чего включается рукоятка 11 в положение «Пуск, При этом коромысло 10 включает пневмораспределитель 8, сигнал из которого поступает в камеру 12 управления и удерживает пневмораспределитель 8 во включенном состоянии после снятия усилия с рукоятки 11, а также поступает в камеры управления клапанов включения промывки 1, ударника 2, подачи 4 и через разделительный клапан 16 - в камеру управления клапана 3 вращателя. Попав в камеры управления указанных клапанов, сигнал производит перемещение порщней 24 в крайнее положение, при этом тяги 22 воздействуют на кулачки 21 таким образом, что площадки 25 кулачков освобождаются от контакта с корпусом клапана, что, в свою очередь, приводит к возвращению под собственным весом рукояток 20 в первоначальное положение, соответствующее выключенному состоянию клапана, однако клапаны остаются включенными сигналом от пневмораспределителя 9. При этом осуществляется режим бурения шпура. После пробуривания шпура на полную глубину срабатывает датчик 17 переднего положения перфоратора, сигнал с выхода которого поступает в камеру 13 управления пневмораспределителя 8 и, ввиду разности активных площадей камер 13 и 12, переключает пневмораспределитель в крайнее верхнее положение и отключает при этом камеры управления клапанов 1-4 от блока 7 питания, что приводит к выключению перечисленных клапанов (блокирующие устройства клапанов не препятствуют этому). Одновременно посредством коромысла 10 включается пневмораспределитель 9, сигнал с выхода которого поступает в ка.меру 14 управления, удерживая его во включенном состоянии, а также поступает в камеры управления клапанов включения продувки 6, реверса подачи 5 и через разделительный клапан 16 - в камеру управления клапа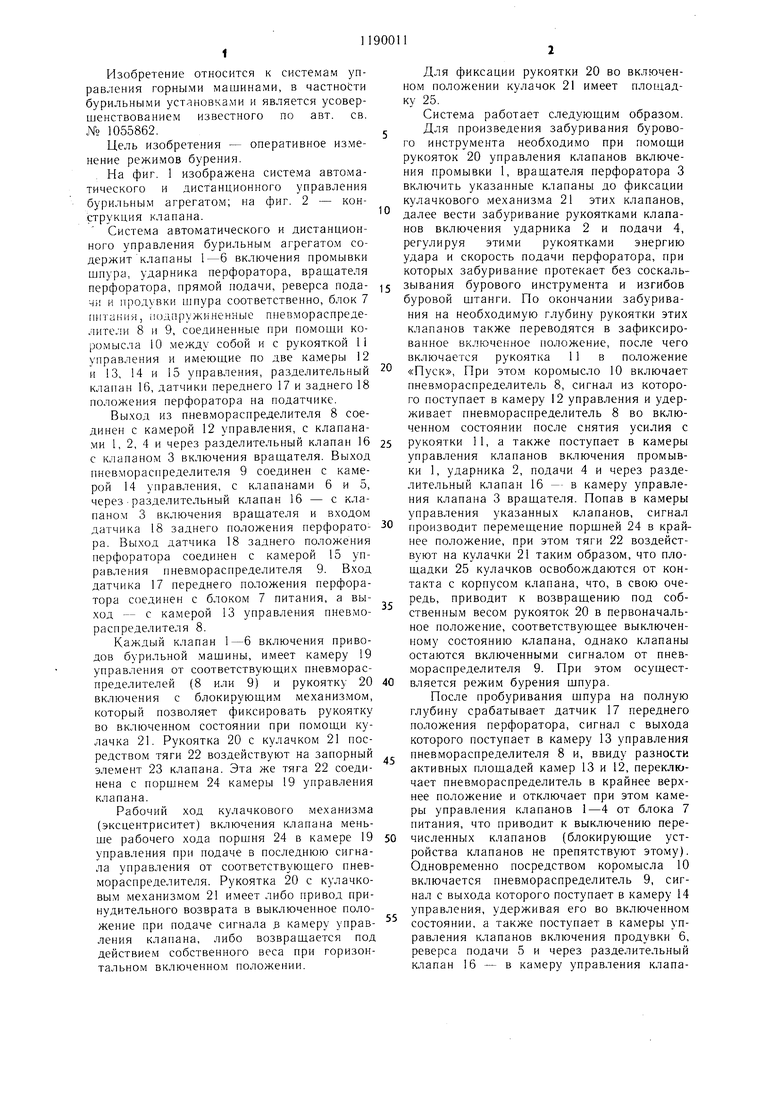
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического и дистанционного управления бурильным агрегатом | 1985 |
|
SU1278453A1 |
| Система автоматического и дистанционного управления бурильным агрегатом | 1982 |
|
SU1055862A1 |
| Устройство для бурения шпуров | 1983 |
|
SU1133386A2 |
| Устройство для бурения шпуров | 1982 |
|
SU1062386A1 |
| Устройство управления бурильной машиной | 1983 |
|
SU1114786A1 |
| Система автоматического и дистанционного управления бурильной установкой | 1975 |
|
SU600296A1 |
| Гидравлическая бурильная машина | 1991 |
|
SU1803551A1 |
| Бурильная машина | 1980 |
|
SU968377A1 |
| Гидравлическая бурильная машина | 1991 |
|
SU1800020A1 |
| Бурильная машина | 1978 |
|
SU699166A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ БУРИЛЬНЫМ АГРЕГАТОМ по авт. св. № 1055862, отличающаяся тем, что, с целью оперативного изменения режимов бурения, каждый из клапанов включения приводов бурильного агрегата снабжен блокирующим устройством, выполненным в виде кулачкового механизма с рукояткой и расположенным на свободном конце клапана. (Л со Питание (Сеть) Фиг.1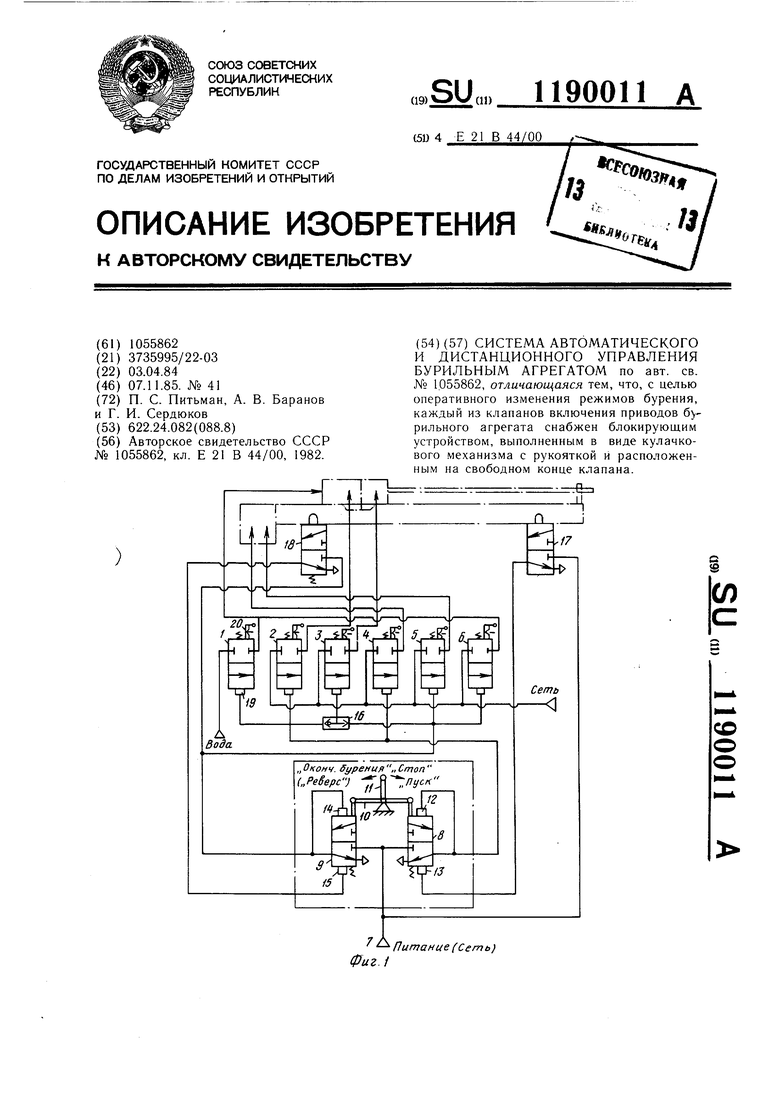
| Система автоматического и дистанционного управления бурильным агрегатом | 1982 |
|
SU1055862A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
