Изобретение относится к автоматизации управления передвижными механизмами и контроля их работы и может найти применение, в частности, в позиционных системах управления автоматическими манипуляторами-дефектоскопами для получения информации о положении блоков акустических головок относительно контролируемого объекта (сварного шва, прокатного профиля и т. п.), передвижных рольгангов, мостовых кранов, тянущих головок правильно-растяжных машин, и т. п.
Цель изобретения - повышение точности устройства.
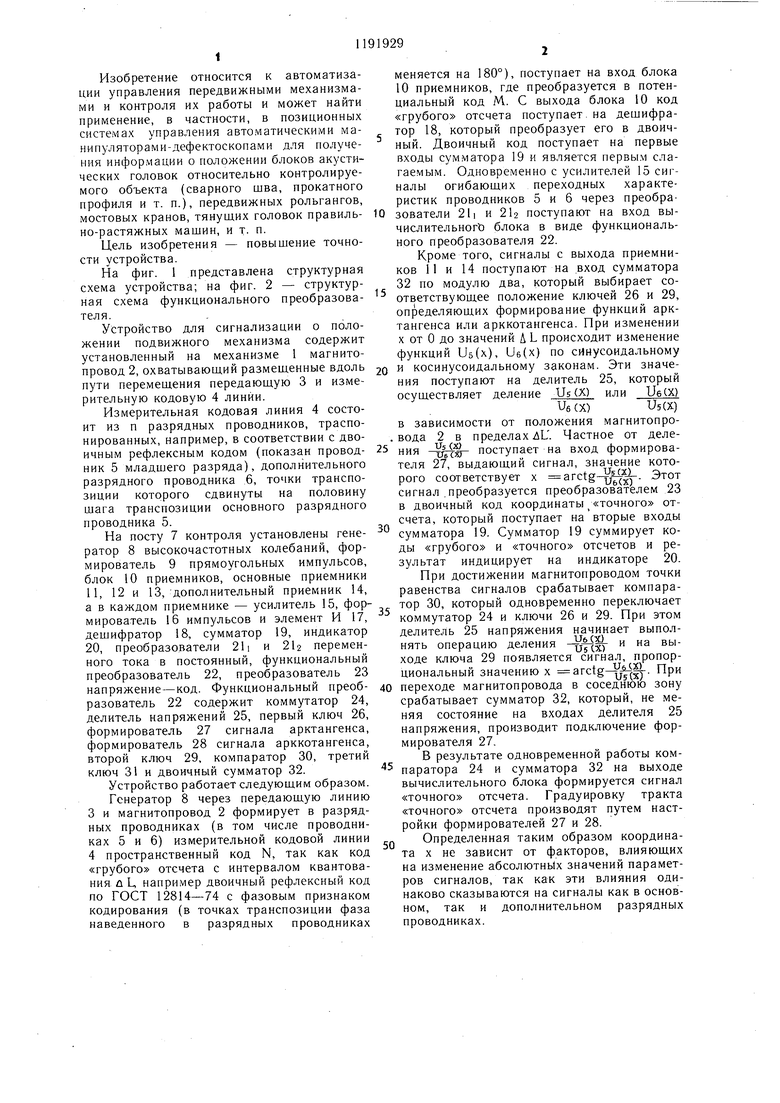
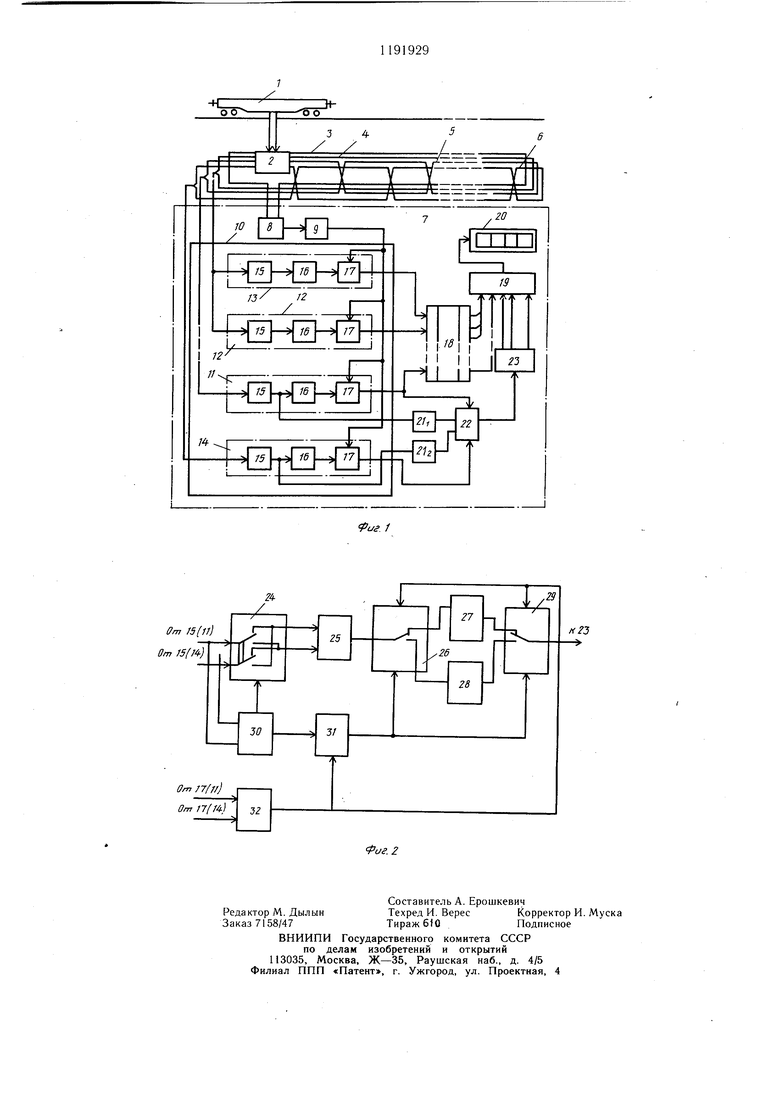
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - структурная схема функционального преобразователя.
Устройство для сигнализации о положении подвижного механизма содержит установленный на механизме 1 магнитопровод 2, охватывающий размещенные вдоль пути перемещения передающую 3 и измерительную кодовую 4 линии.
Измерительная кодовая линия 4 состоит из п разрядных проводников, траспонированных, например, в соответствии с двоичным рефлексным кодом (показан проводник 5 младшего разряда), дополнительного разрядного проводника 6, точки транспозиции которого сдвинуты на половину шага транспозиции основного разрядного проводника 5.
На посту 7 контроля установлены генератор 8 высокочастотных колебаний, формирователь 9 прямоугольных импульсов, блок 10 приемников, основные приемники 11, 12 и 13,дополнительный приемник 14, а в каждом приемнике - усилитель 15, формирователь 16 импульсов и элемент И 17, дешифратор 18, сумматор 19, индикатор 20, преобразователи 211 и 212 переменного тока в постоянный, функциональный преобразователь 22, преобразователь 23 напряжение-код. Функциональный преобразователь 22 содержит коммутатор 24, делитель напряжений 25, первый ключ 26, формирователь 27 сигнала арктангенса, формирователь 28 сигнала арккотангенса, второй ключ 29, компаратор 30, третий ключ 31 и двоичный сумматор 32.
Устройство работает следующим образом.
Генератор 8 через передающую линию
3и магнитопровод 2 формирует в разрядных проводниках (в том числе проводниках 5 и 6) измерительной кодовой линии
4пространственный код N, так как код «грубого отсчета с интервалом квантования п L, например двоичный рефлексный код по ГОСТ 12814--74 с фазовым признаком кодирования (в точках транспозиции фаза наведенного в разрядных проводниках
меняется на 180°), поступает на вход блока 10 приемников, где преобразуется в потенциальный код М. С выхода блока 10 код «грубого отсчета поступает на дещифратор 18, который преобразует его в двоичный. Двоичный код поступает на первые входы сумматора 19 и является первым слагаемым. Одновременно с усилителей 15 сигналы огибающих переходных характеристик проводников 5 и 6 через преобразователи 211 и 212 поступают на вход вычислительногЬ блока в виде функционального преобразователя 22.
Кроме того, сигналы с выхода приемников 11 и 14 поступают на вход сумматора 32 по модулю два, который выбирает соответствующее положение ключей 26 и 29, определяющих формирование функций арктангенса или арккотангенса. При изменении X от О до значений Д L происходит изменение функций U5(x), иб(х) по синусоидальному и косинусоидальному законам. Эти значения поступают на делитель 25, который осуществляет деление Us (X) или UeCX)
УбСХ)U5(X)
в зависимости от положения магнитопровода 2 в пределах ли. Частное от деления поступает на вход формирователя 27, выдающий сигнал, значение которого соответствует х 3ctg-. Этот сигнал .преобразуется преобразователем 23 в двоичный код координаты «точного отсчета, который поступает на вторые входы сумматора 19. Сумматор 19 суммирует коды «грубого и «точного отсчетов и результат индицирует на индикаторе 20.
При достижении магнитопроводом точки равенства сигналов срабатывает компаратор 30, который одновременно переключает коммутатор 24 и ключи 26 и 29. При этом делитель 25 напряжения начинает выполнять операцию деления э ыходе ключа 29 появляется сигнал, пропорциональный значению х arctg- - |у. При переходе магнитопровода в соседн юю зону срабатывает сумматор 32, который, не меняя состояние на входах делителя 25 напряжения, производит подключение формирователя 27.
В результате одновременной работы компаратора 24 и сумматора 32 на выходе вычислительного блока формируется сигнал «точного отсчета. Градуировку тракта «точного отсчета производят путем настройки формирователей 27 и 28.
Определенная таким образом координата X не зависит от факторов, влияющих на изменение абсолютных значений параметров сигналов, так как эти влияния одинаково сказываются на сигналы как в основном, так и дополнительном разрядных проводниках.
X
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения временных интервалов | 1985 |
|
SU1293692A1 |
| Устройство для приема и передачи сигналов | 1983 |
|
SU1180947A1 |
| ИЗМЕРИТЕЛЬ ХАРАКТЕРИСТИК ФАЗОВЫХ ФЛУКТУАЦИЙ | 1992 |
|
RU2041469C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ ЭЛЕКТРИЧЕСКОГО КАБЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2190234C1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ РАДИОТЕЛЕМЕТРИЧЕСКИХ СИГНАЛОВ | 1994 |
|
RU2126139C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА СИГНАЛОВ РАДИОСТАНЦИЙ | 2001 |
|
RU2202853C2 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| Устройство для передачи и приема многопозиционных широкополосных сигналов | 1986 |
|
SU1345361A1 |
| Корреляционный измеритель фазовых соотношений узкополосных случайных процессов | 1990 |
|
SU1714616A1 |
1. УСТРОЙСТВО ДЛЯ СИГНАЛИЗАЦИИ О ПОЛОЖЕНИИ ПОДВИЖНОГО ОБЪЕКТА, содержащее установленный на передвижном механизме магнитопровод, раз.мещенные вдоль пути перемещения механизма и соединенные между собой посредством магнитопровода передающую линию и состоящую из транспонированных в соответствии с- принятым законом кодирования разрядны.к проводников измерительную кодовую линию, установленный на посту контроля генератор высокочастотных колебаний, подключенный к передающей линии, дещифратор, индикатор, преобразователь напряжения в код, отличающееся тем, что, с целью повыщения точности устройства, в него введены дополнительный разрядный проводник в измерительную кодовую линию, в которой точки транспозиции дополнительного разрядного проводника сдвинуты на половину щага транспозиции основного разрядного проводника, основные и дополнительный приемники, преобразователи переменного напряжения в постоянное, функциональный преобразователь и сумматор, первые входы основных приемников подключены к разрядным проводникам измерительной кодовой линии, вторые входы основных приемников соединены с соответствующими входами дещифратора, выходы которого подключены к первым входам сумматора, выход сумматора соединен с индикатором, выходы преобразователя напряжения в код иодк.иочсны к вторым входам су.мматора, выход дополнительного разрядного проводника измерительной кодовой линии соединен с первым входом дополнительного приемника, второй выход после тнего основного приемника и второй выход дополнительного приемника через соответствующие преобразователи переменного напряжения в пос тоянное соединены с первыми входами функционального преобразователя, вторые входы которого подключены к первым выходам последнего из первых приемников и дополнительного приемника, выход функционального преобразователя соединен с входом преобразователя напряжения в код. 2.Устройство по п. 1, отличающееся тем, что функциональный преобразоваi тель вьпюлнен в виде последовательно соединенных коммутатора, делителя нанряже(Л ний и первого ключа, выходы которого соответственно через формирователь сигналов арктангенса и формирователь сигналов арккотангенса подключены к первым входа.м второго ключа, выход которого соединен с выходом функционального преобразователя, первые входы которого подключены к входам коммутатора и со компаратора, первый выход компаратора соединен с управляющим входом комму(Г татора, а второй выход - с первым вхого дом третьего ключа, вторые входы функционального преобразователя соединесо ны с входами двоичного сумматора, выход которого подключен к вторым входам первого, второго и третьего ключей, выход третьего ключа соединен с третьими входами первого и второго ключей. 3.Устройство по п. 1, отличающееся тем, что каждый приемник -содержит последовательно соединенные усилитель и формирователь импульсов, выход которого подключен к первому входу элемента И, выход которого является первым выходом приемника, выход усилителя является вторым выходом приемника, второй вход элемента И является вторым входом приемника.
| Устройство для измерения положения передвижных механизмов | 1980 |
|
SU898487A1 |
