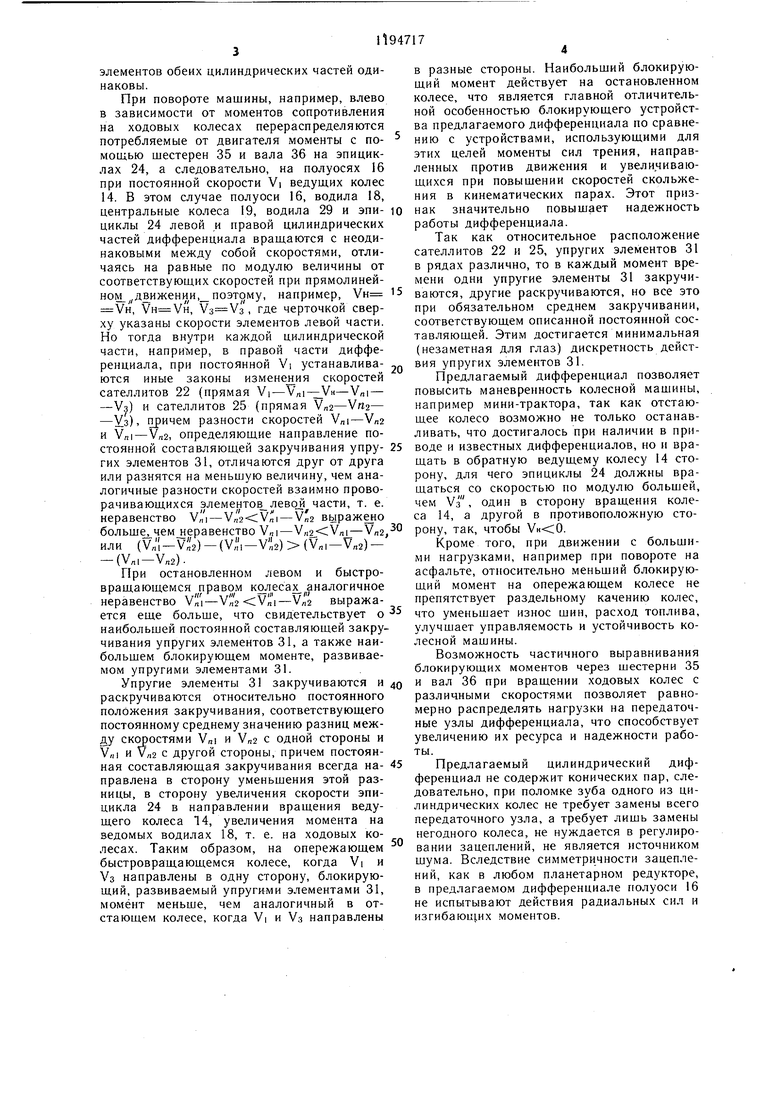
Изобретение относится к автотранспортной технике, в частности к самоблокирующимся дифференциалам трансмиссий транспортных средств. Цель изобретения - повышение надежности работы. На фиг. 1 изображена кинематическая схема самоблокирующегося дифференциала; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - план скоростей элементов дифференциала. Вал 1 главной передачи колесной машины, установленный в подщипниках 2, имеет косой участок сосферическим щарниром 3, на который надеты фланцы 4 и 5 труб 6 и 7, стянутые друг к другу и к шарниру 3 болтами 8. В единых расточках фланцев 4 и 5 посажены надетые на вал 1 кольца упорНЫХ шарикоподшипников 9, вторые кольца их также надетые на вал 1, прижаты гайками 10, навернутыми на резьбовые участки вала 1. Трубы 6 и 7 вторыми концами надеты на подшипники 11 качения или скольжения, установленные на косых шипах 12 и 13 ведущих колес 14. Колеса 14 надеты на шарикоподшипники 15, установленные на полуосях 16. Полуоси 16 установлены в подшипниках 17 и соединены с ходовыми колесами (на фиг. 1 не показаны). На полуосях 16 неподвижно закреплены ведомые водила 18 дифференциального первого ряда и центральнь е колеса 19 планетарного второго ряда. Веду1л,ие центральные колеса 14 зацеплены с сателлитами 20, установленными на осях 21. На продолжениях осей 21 установлены сателлиты 22 третьего ряда, зацепленные с дополнительным внутренним зубчатым венцом 23 эпицикла 24 дифференциального ряда. Сателлиты 25 планетарного второго ряда зацеплены с колесами 19 и 26. Колеса 26 закреплены неподвижно в корпусе 27 ведущего моста машины. Оси 28 сателлитов 25 подвижно установлены в свободном водиле 29, вставленном в подшипнике 30 скольжения корпуса 27. Сателлиты 22 и 25 подвижно связаны между собой упругими элементами 31 с возможностью взаимного относительного проворота. Упругими элементами 3 могут служить цилиндрические пружины закручивания или упругие, например, торсионные валы. Эпициклы 24 установлены в щарикоподшипниках 32 и имеют один внещний 33, другой внутренний 34 дополнительные зубчатые венцы, кинематически связанные между собой шестернями 35, установленными неподвижно. на валу 36. Вал 36 установлен в подшипниках 37 корпуса 27. Имеют одинаковые модули и числа зубьев между собой сателлиты 20, 22 и 25, центральные колеса 14 и 19, венцы внутренние эпицикла 24 и колеса 26. Относительное расположение сателлитов 22 и 25, упругих элементов 31 во втором и третьем рядах должно равномерно по окружности различаться на угол 2п/7., где Z - число сателлитов в ряду. Например, если Z 6, то концы упругих элементов 31 в сателлитах 22 должны быть защемлены в плоскости, отстоящей на угол 60° от плоскостей расположения мест защемления концов упругих элементов 31 в соседних сателлитах 22 и 25. Предлагаемый дифференциал работает следующим образом. При вращении главного вала 1 косой его участок совершает сферическое движение вокруг центра сферического щарнирз 3, расположенного на пересечении осей вала 1 и полуосей 16. При этом гайки 10, воздействуя через шарики упорных подщипников 9 на кольца, посаженные в единых расточках фланцев 4 и 5, заставляют трубы 6 и 7 совершать сферическое движекие с аналогичной угловой скоростью вращения главного вала 1. Трубы 6 и 7, воздействуя непосредственно на косые шипы 12 и 13, а также с помощью пальцев 38, запрессованных в эти плипы и скользящих в пазах труб, вращают колеса 14, например, со скоростью Vi (фиг. 3). Колеса 4 передаЕОт вращение через сателлиты 20 ведомым водилам 18, т. е. полуосям 16 или ходовым колесам. При этом эпициклы 24 в зависимости от направления поворота машины могут вращаться с различными скоростями, например Уз, Vj. Va и V/. При прямом ходе машины, когда ходовые колеса катятся прямолинейно с одинаковой скоростью, потребляя равные моменты от двигателя, эпициклы 24 неподвижны, , колеса 14 и 19 каждой цилиндрической части дифференциала вращаются с равными угловыми скоростями, т. е. обе цилиндрические части работают как единый планетарный механизм Джемса. Вал 36 с шестернями 35 в этом случае неподвижен, так как упругие элементы 31 подвергаются закручиванию на один и тот же угол в обеих цилиндрических частях, развивают одинаковые моменты на эпициклах 24, которые, будучи направленными на шестернях 35 в разные стороны, компенсируют друг друга на валу 36. Одинаковый угол закручивания упругих элементов 31 обеспечивается тем, что законы изменения линейных скоростей взаимно проворачивающихся звеньев - сателлитов 22 ii 25 - при одинаковых угловых скоростях одноименных элементов обеих цилиндрических частей идентичны и относительный угол поворота их равный. На фиг. 3 индексом «п обозначены линейные скорости мест защемления концов упругих элементов 31, черточкой сверху - скорости этих мест через 180° поворота сателлитов 22 и 25, индексом скорости осей сателлитов. При прямом ходе машины закон изменения скорости сателлита 22 представляет собой прямую Vi - „з-VH-V,, закон изменения скорости сателлита 25 - прямую , п ричем разности скоростей ,, и Уп1-Уп2 для взаимно провооачиваюшихся элементов обеих цилиндрических частей одинаковы. При повороте мащины, например, влево в зависимости от моментов сопротивления на ходовых колесах перераспределяются потребляемые от двигателя мо.менты с помощью щестерен 35 и вала 36 на эпициклах 24, а следовательно, на полуосях 16 при постоянной скорости Vi ведущих колес 14. В этом случае полуоси 16, водила 18, центральные колеса 19, водила 29 и эпициклы 24 левой и правой цилиндрических частей дифференциала вращаются с неодинаковыми между собой скоростями, отличаясь на равные по модулю величины от соответствующих скоростей при прямолинейном,дв ижен11и,поэтому, например, VH VH, , , где черточкой сверху указаны скорости элементов левой части. Но тогда внутри каждой цилиндрической части, например, в правой части дифференциала, при постоянной Vi устанавливаются иные законы изменен ия скоростей сателлитов 22 (прямая Vi-Vni- Vn-У„| - -Уз) и сателлитов 25 (прямая Vni-Vrt2- -УЗ), гтричем разности скоростей Vni-Vn2 и Vni-Vn2, определяющие направление постоянной составляющей закручивания упругих элементов 31, отличаются друг от друга или разнятся на меньщую величину, чем аналогичные разности скоростей взаимно проворачивающихся элементов лев(эи части, т. е. неравенство -V2 выражено больще чем(еравенство У„1-У„2 Ул1-Уп2, или () - ()(Уп1-Уп2)- - (Ул1-У„2) При остановленном левом и быстровращающемся правом колесах аналогичное неравенство Уп|-Ул2 выражается еще больще, что свидетельствует о наибольшей постоянной составляющей закручивания упругих элементов 31, а также наибольшем блокирующем моменте, развиваемом упругими элементами 31. Упругие элементы 31 закручиваются и 4 раскручиваются относительно постоянного положения закручивания, соответствующего постоянному среднему значению разниц между скоростями У„1 и У„2 с одной стороны и V,,i и У„2 с другой стороны, причем постоянная составляющая закручивания всегда на- 4 правлена в сторону уменьшения этой разницы, в сторону увеличения скорости эпицикла 24 в направлении вращения ведущего колеса 14, увеличения момента на ведомых водилах 18, т. е. на ходовых колесах. Таким образом, на опережающем быстровращающемся колесе, когда У и УЗ направлены в одну сторону, блокирующий, развиваемый упругими элементами 31, момент меньше, чем аналогичный в отстающем колесе, когда У| и Уз направлены в разные стороны. Наибольший блокирующий момент действует на остановленном колесе, что является главной отличительной особенностью блокирующего устройства предлагаемого дифференциала по сравнению с устройствами, использующими для этих целей моменты сил трения, направленных против движения и увеличивающихся при повыщении скоростей скольжения в кинематических парах. Этот признак значительно повыщает надежность работы дифференциала. Так как относительное расположение сателлитов 22 и 25, упругих элементов 31 в рядах различно, то в каждый момент времени одни упругие элементы 31 закручиваются, другие раскручиваются, но все это при обязательном среднем закручивании, соответствующем описанной постоянной составляющей. Этим достигается минимальная (незаметная для глаз) дискретность действия упругих элементов 31 Предлагаемый дифференциал позволяет повысить маневренность колесной машины, например мини-трактора, так как отстающее колесо возможно не только останавливать, что достигалось при наличии в приводе и известных дифференциалов, но и вращать в обратную ведущему колесу 14 сторону, для чего эпициклы 24 должны вращаться со скоростью по модулю больщей, чем Уз, один в сторону вращения колеса 14, а другой в противоположную сторону, так, чтобы . Кроме ТОГО, при движении с большими нагрузками, например при повороте на асфальте, относительно меньший блокирующий момент на опережающем колесе не препятствует раздельному качению колес, что уменьщает износ щин, расход топлива, улучшает управляемость и устойчивость колесной машины. Возможность частичного выравнивания блокирующих моментов через шестерни 35 л 36 при вращении ходовых колес с различными скоростями позволяет равномерно распределять нагрузки на передаточные узлы дифференциала, что способствует увеличению их ресурса и надежности работы. Предлагаемый цилиндрический дифференциал не содержит конических пар, следовательно, при поломке зуба одного из цилиндрических колес не требует замены всего передаточного узла, а требует лишь замены негодного колеса, не нуждается в регулировании зацеплений, не является источником шума. Вследствие симметричности зацеплений, как в любом планетарном редукторе, в предлагаемом дифференциале полуоси 16 не испытывают действия радиальных сил и изгибаюи1,их моментов.
иг. 3
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовой редуктор колесного крутосклонного трактора | 1984 |
|
SU1232515A1 |
| МЕХАНИЧЕСКАЯ АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1993 |
|
RU2083385C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| Двухрежимный дифференциальный механизм распределения мощности | 2024 |
|
RU2837931C1 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| Самоблокирующийся дифференциал колесного транспортного средства | 1987 |
|
SU1498642A1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2093374C1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ АВТОМОБИЛЯ | 2016 |
|
RU2634062C1 |
ЦИЛИНДРИЧЕСКИЙ САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ, содержащий левый и правый дифференциальные первые ряды с ведущим центральным колесом, с ведомым водилом, закрепленным на полуоси, и со свобо.1но установленным эпициклом, блокирующее устройство, включающее по крайней мере два взаимно проворачивающихся звена и планетарный второй ряд, центральное колесо которого закреплено на полуоси, смещенные один относительно другого в осевом направлении сателлиты, введенные в зацепление с центральными колесами, упругие элементы, отличающийся -тем, что, с целью повышения надежности работы, он снабжен третьим рядом сателлитов, установленных на продолжении осей сателлитов первого ряда и представляющих вместе с сателлитами второго ряда указанные взаимно проворачивающиеся звенья, связанные подвижно упругими элементами, эпицикл снабжен дополнительным внутренним зубчатым венцом, зацепленным с сателлитами третьего ряда, и венцом для кинематического соединения левой и правой полуосей посредством вала с шестернями, зацепленными с указанными венцами, ведущие центральные колеса дифференциальных рядов кинематически связаны с приводным валом с помощью труб, надетых на косые щипы этих колес, i а пальцы, запрессованные в эти шипы, введены в пазы труб, выполненные в их стен(Л ках по образующим, фланцы труб надеты на сферический шарнир приводного вала, связаны друг с другом крепежным элементом и установлены на приводном валу посредством упорных щарикоподшипников, поджатых к фланцам.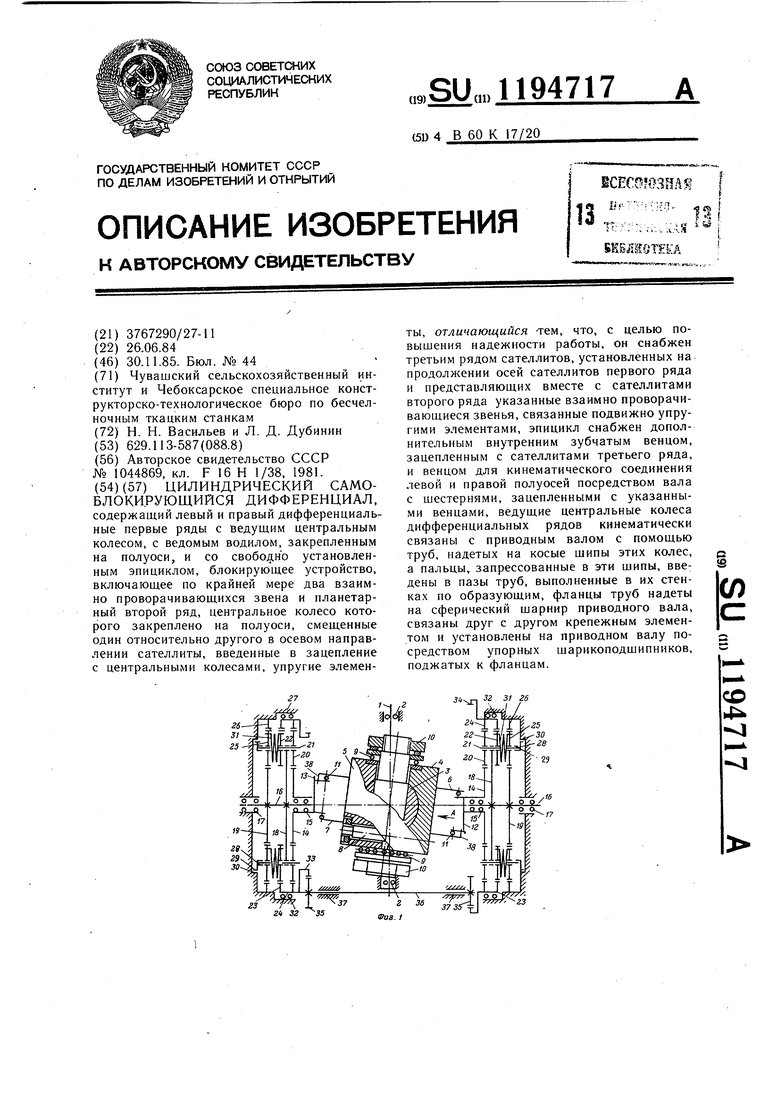
| Цилиндрический дифференциал | 1981 |
|
SU1044869A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
