(i 00 GO
изобретение относится к грузеподъемньм устройствам для захвата, подъема и транспортировки мешковых грузов в строп-контейнерах, , .
Цель изобретения - повьшение эффективности путем упрощения фиксации пакета груза.
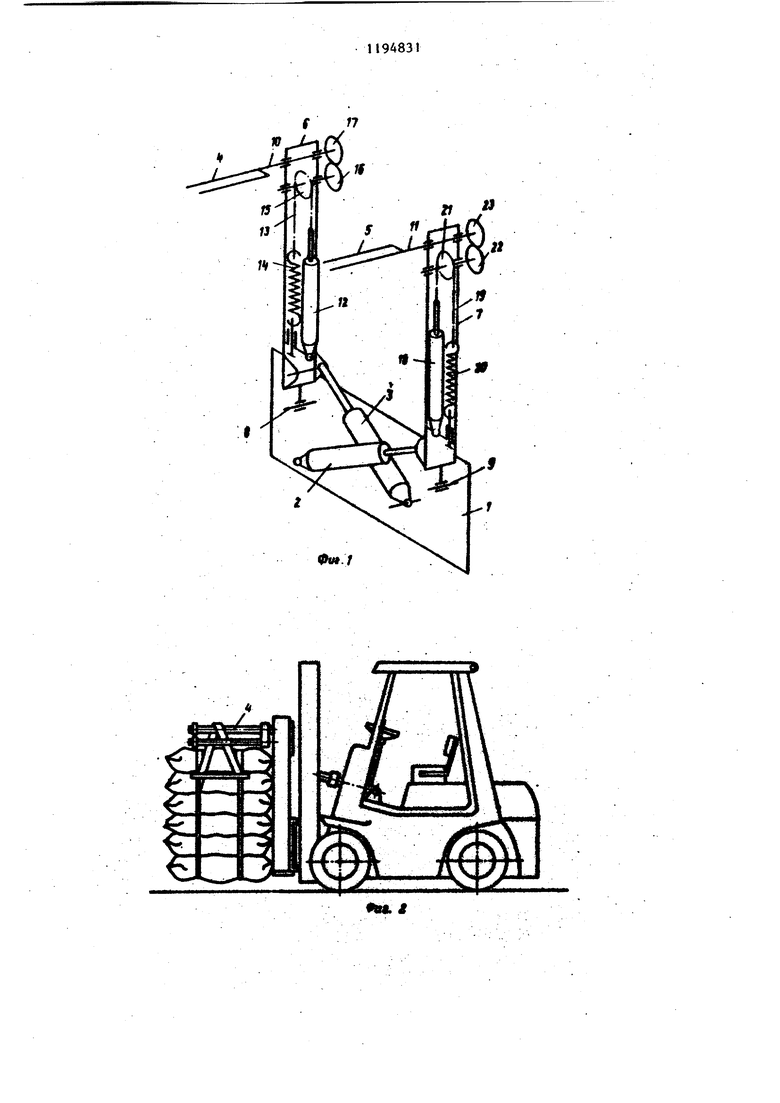
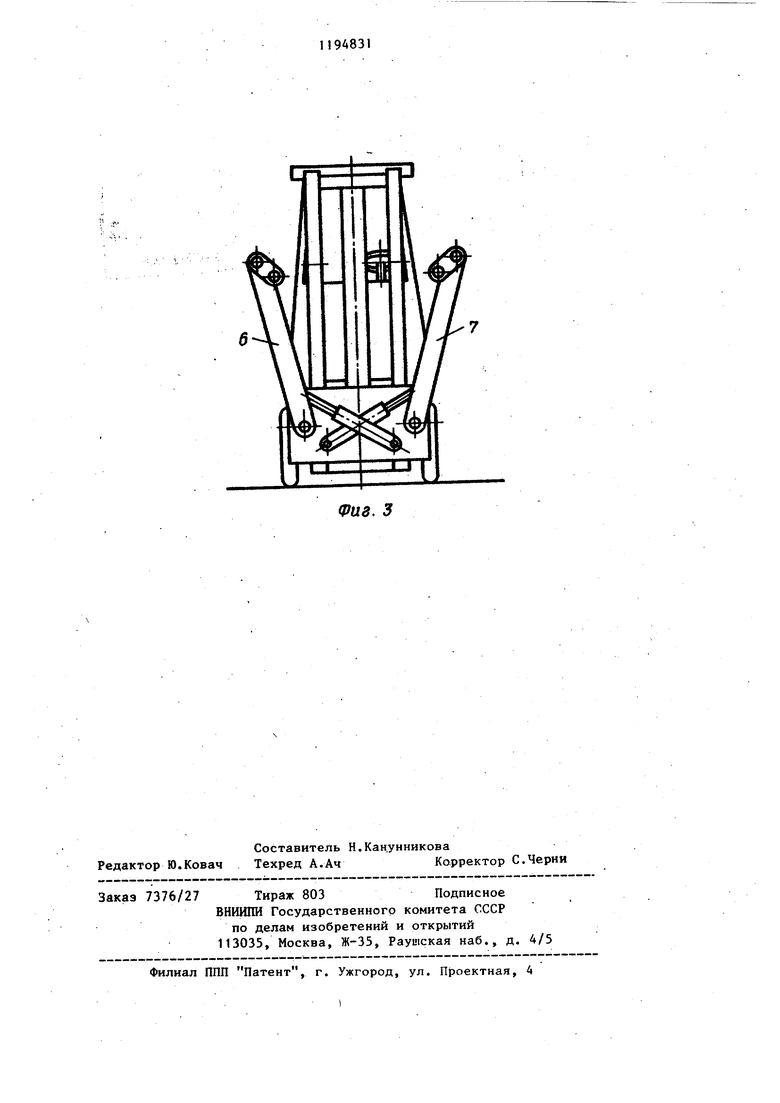
На фиг. 1 изображена принципиалная схема захватного устройства; на фиг. 2 - вагонный автопогрузчик с навешенными на его каретку захваным устройством, общий вид, на фиг. 3 - погрузчик, вид спереди бе пакета..
Устройство для перегрузки пакетов груза в строп-контейнерах содержит устанавливаемую на каретку погрузчика раму 1, несущую, шарнир но закрепленные гидроцилиндры 2 и 3 с возможностью поворота в вертикальной плоскости, связанные с захватными органами 4 и 5. На раме 1 шарнирно закреплены рычаги 6 и 7 с возможностью поворота в вертикальной плоскости вокруг осей 8 и 9, шарнирно соединенные с гидроцилиндрами 2 и 3.
Захватные органы выполнены вильчатыми и каждый из них смонтирован на свободном конце рычагов 6 и 7 с возможностью поворота относительно горизонтальных валов 10 и 11 приводом, который смонтирован на каждом из указанных рычагов,
Привод поворота каждо го захватного органа включает в себя гидроцилиндр 12, на штоке которого закреплена цепь 13, свободный коне которой закреплен на пружине 14, прикрепленной свободным концом к с ответствующему рычагу 6, Цепь 13 . приводит во вращение звездочку 15, которая, в свою очередь, вращает звездочки 16 и 17. Звездочка 17 закреплена на горизонтальном валу 10, на котором смонтирован вильчатый захватный орган 4,
Привод поворота захватного органа 5 включает в себя гидроцилинд 18, на штоке которого закреплена
1948311
цепь 19, свободный конец которой закреплен на пружине 20, прикрепленной свободным концом к рычагу 7. Цепь 19 приводит во вращение звездочку 21, которая, в свсво очередь, вращает звездочки 22 и 23. Звездочка 23 закреплена на горизонтальном валу 11, на котором смонтирован вильчатый захватный орган 5.
Гидроцилиндры 12 и 18 приводятся в действие одновременно от гидросистемы погрузчика (не показано). Гидроцилиндры 2 и 3 приводятся в действие от гидросистемы погрузчики раздельно.
Устройство работает следующим образом.
Погрузчик, оборудованный предлагаемым устройством, подъезжает к пакету с грузом. Стропальщик набрасывает петли строп-контейнера на центральную часть захватных органов (при взятии пакета грузов в поперечном направлении). Предварительно рычаги 6 и 7 разводятся до размера, соответствующего размеру перегружаемого пакета. Захватные органы опускаются на пакет и включается в работу привод поворота захватных органов 4 и 5, выбирается слабина в стропах. После выборки слабины пакет прижат к захватным органам, осуществляется подъем и транспортирование пакета на место выгрузки. На месте выгрузки одновременным поворотом рычагов 6 и 7 груз можно сместить вправо или влево, что позволяет более Плотно загружать помещение склада или вагона. После опускания груза ослабляются стропы и захватные органы автоматически освобождаются от петель. При взятии пакета
грузом в предельном направлении стропы контейнера выбрасываются на один захватный орган одного рычага, совмещенного с центром погрузчика. Выборка слабины стропов в этом случае не производится.
f Л
Ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для исследования рабочих органов погрузчиков | 1989 |
|
SU1721466A1 |
| КОНТЕЙНЕРОВОЗ | 1991 |
|
RU2022832C1 |
| Навесной вилочный погрузчик | 2021 |
|
RU2764788C1 |
| Погрузчик | 1990 |
|
SU1749173A1 |
| СИСТЕМА И СПОСОБ УКЛАДКИ БРЕЗЕНТА НА ГРУЗ | 2013 |
|
RU2623369C1 |
| НАВЕСНОЕ БУРОРЫХЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПОГРУЗЧИКА | 1991 |
|
RU2011762C1 |
| ЧЕЛЮСТНОЙ ПОГРУЗЧИК-ИЗМЕЛЬЧИТЕЛЬ | 1991 |
|
RU2025948C1 |
| Устройство для обжатия материалов | 1989 |
|
SU1722870A1 |
| Устройство для формирования пакетов из штучных грузов | 1983 |
|
SU1081100A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1991 |
|
RU2006453C1 |
УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ПАКЕТОВ ГРУЗА В СТРОП-КОНТЕЙНЕРАХ, содержащее устанавливаемую на ка:ретку погрузчика раму, несущую шарнирио закрепленные гндроцилиндры, связанные с захватными органами, отличающее с я тем, что. с целью повышения эффективности путем упрощения фиксации пакета груза, оно снабжено расположенными симметрично относительно поперечной оси указанной рамы, рычагами, каждый из которых шарнирно закреплен одним концом на раме с возможностью поворота в вертикальной плоскости и шарнирно соединен с одним из указанных гидроцилиндров, а захватные органы вьгполнены вильчатыми и каждый из них закреплен на горизонтальном валу, который смонтирован на свободном конце указанного рычага с возможностью поi ворота приводом, который закреплен на этом рычаге. (Л
| Устройство для подъема и транспортирования пакетов груза в строп-контейнерах | 1977 |
|
SU742370A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
