Изобретение относится к устройствам для механизированного формирования пакетов, в частности, из мешков, например, на поддонах в трюмах судов, и может быть использовано в различных отраслях народного хозяйства при перегрузке штучных грузов.
Известно устройство для формирования пакетов из штучных грузов, преимущественно мешков, содержаш.ее передвижную платформу и закрепленный на ней подъемный механизм с захватным органом 1.
Недостаток известного устройства заключается в том, что мешки из вертикального штабеля захватываются в одном положении и укладываются в таком же положении на поддон отдельными стопками в пакет, при этом подъемное устройство занимает значительное пространство по высоте, а пакет оказывается неустойчивым, так как стыки мешков, уложенных в слое на поддоне, не перекрываются мешками верхнего слоя, т.е. мешки не уложены «вперевязку.
Цель изобретения - расширение технологических возможностей путем обеспечения укладки мешков в пакет с перевязкой.
Для этого в устройстве для формирования пакетов из штучных грузов, преимущественно мешков, содержащем передвижную платформу и закрепленный на ней подъемный механизм с захватным органом, подъемный механизм содержит жестко закрепленную на платформе вертикальную стойку, рычаги, один из которых установлен на платформе с возможностью перемещения в вертикальной и поворота в горизонтальной плоскостях, а другой закреплен ка свободном конце первого рычага с возможностью юворота в горизонтальной плоскости, при этом захватный орган смонтирован на свобод-ном конце второго рычага с возможностью поворота в горизонтальной плоскости.
На фиг. 1 изображено устройство, вид сверху; на фиг. 2 - устройство, вид сбоку.
Устройство для формирования пакетов из штучных грузов содержит передвижную платформу 1, на которой расположен подъемный механизм 2. На платформе 1 жестко укреплена вертикальная стойка 3, например, цилиндрической формы, на которой расположен с помощью стакана 4 подъемно-опускной и поворотный в горизонтальной плоскости рычаг 5. Стакан 4 передвигается по вертикальной направляющей 3 гидроцилиндром 6, который жестко установлен на платформе 1. Стакан 4 и рычаг 5 связаны между собой с помощью, например, радиально-упорного подшипника 7. На стакане 4 жестко закреплен зубчатый венец 8, с которым входит в зацепление рейка 9, закрепленная на штоке гидроцилиндра 10. Корпус цилиндра 10 жестко закреплен на рычаге 5. На свободном конце рычага 5 с помощью радиальноупорного подшипника 11 установлен поворотный в горизонтальной п.юскости второй рычаг 12 и неподвижно закреплен зубчатый венец 13, с которым входит в зацепление
рейка 14, закрепленная на штоке гидроцилиндра 15. Корпус гидроцилиндра 15 жестко закреплен на рычаге 12. Двигая рейку 14, гидроцилиндр 15 вращает рычаг 12 относительно рычага 5.
На свободном конце рычага 12 с помощью радиально-упорного подшипника 16 установлен корпус гидроцилиндра 17, на котором жестко закреплен зубчатый венец 18, в зацеплении с которым входит рейка 19. Рейка 19 закреплена на штоке гидроцилиндра 20, корпус которого жестко закреплен на рычаге 12. На щтоке гидроцилиндра 17 установлен захватный орган 21, например, вакуумный, для мешков 22. Двигая рейку 19, гидроцилиндр 20 вращает гидроцилиндр 17 с захватным органом 21 относительно .ры0 чага 12. Нлатформа 1 имеет .механизм передвижения, например, гусеничный, включающий привод 23, гусеницы 24, приводные звездочки 25, натяжные звездочки 26 и механизм разворота, включающий жестко закрепленный гидроцилиндр 27, плиту 28, укрепленную на щтоке гидроцилиндра 27, цепную звездочку 29, закрепленную на плите 28, цепь 30 и два гидроцилиндра 31. На противоположном относительно стойки 3 конце платформы 1 установлен шарнирно стол 32, который
0 из вертикального положения в горизонтальное перемещается с помощью гидроцилиндра 33. Платформа 1 и стол 32 имеют цепные конвейеры 34 с общим приводом 35. Устройство располагается, например, в трюме судна с люком 36.
5Устройство работает следующим обра
зом.
На конвейер 34 платформы I устанавливается поддон. Захватным органом 21 из щтабеля захватывается мешок 22, который
„ несколько поднимается гидроцилиндро.м 17 над слоем, в котором он находился. Затем в результате поворота в горизонтальной плоскости рычага 5 относительно стойки 3 и рычага 12 относительно рычага 5 производится перемещение мещка 22 и укладка
5 его в нужном месте пакета 37. Укладка мешка 22 в пакете ведется «вперевязку, что обеспечивается поворото.м захватного органа 21 в горизонтальной плоскости с помощью гидроцилиндра 20.
Поворачиваясь, рычаги 5 и 12 перемещают захватный орган 2 с мешком 22 в горизонтальной плоскости, что не зависит от длин рычагов 5 и 12 и, следовательно, от вылета устройства. После того, как пакет 37 сформирован, включается цепной конве5 йер 34, который перемещает пакет 37 с поддоном на установленный горизонтально стол 32. При этом стол 32 располагается на просвете люка 36 трюма, в то время как
остальная часть устройства находится под палубой, что дает возможность транспортировать пакет 37 из трюма судна вверх, например, береговым краном, условно не показанным. Механизм передвижения служит для перемещения устройства на новое место, а после, подъема на плите 28 устройство может разворачиваться с помощью гидроцилиндров 31.
Предлагаемое техническое рещение в отличие от известного позволяет благодаря закреплению захватного органа 21 шарнирно с возможностью поворота в горизонтальной плоскости разворачивать мешок для формирования слоев в пакете «вперевязку, что дает возможность сформировать устойчивый для дальнейщего транспортирования пакет и, следовательно, расширяет технологические возможности устройства, кроме того, в отличие от известного устройства, где захватный орган движется по дуге в вертикальной плоскости от щтабеля к пакету, процесс перемещения мешка осуществляется вращением в горизонтальной плоскости двух рычагов, имеющих возможность поворачиваться на 360° вокруг осей вращения. При этом меток перемещается горизонтально и размер устройства по высоте не изменяется и не зависит от размеров рычагов, что позволяет работать в ограниченном по высоте пространстве в трюме судна под палубой, в то время как у известного устройства с увеличением вылета, т.е. с увеличением длины опор с захватом, увеличивается зани.маемое по высоте пространство и ухудшаются условия работы устройства в ограниченном по высоте пространстве.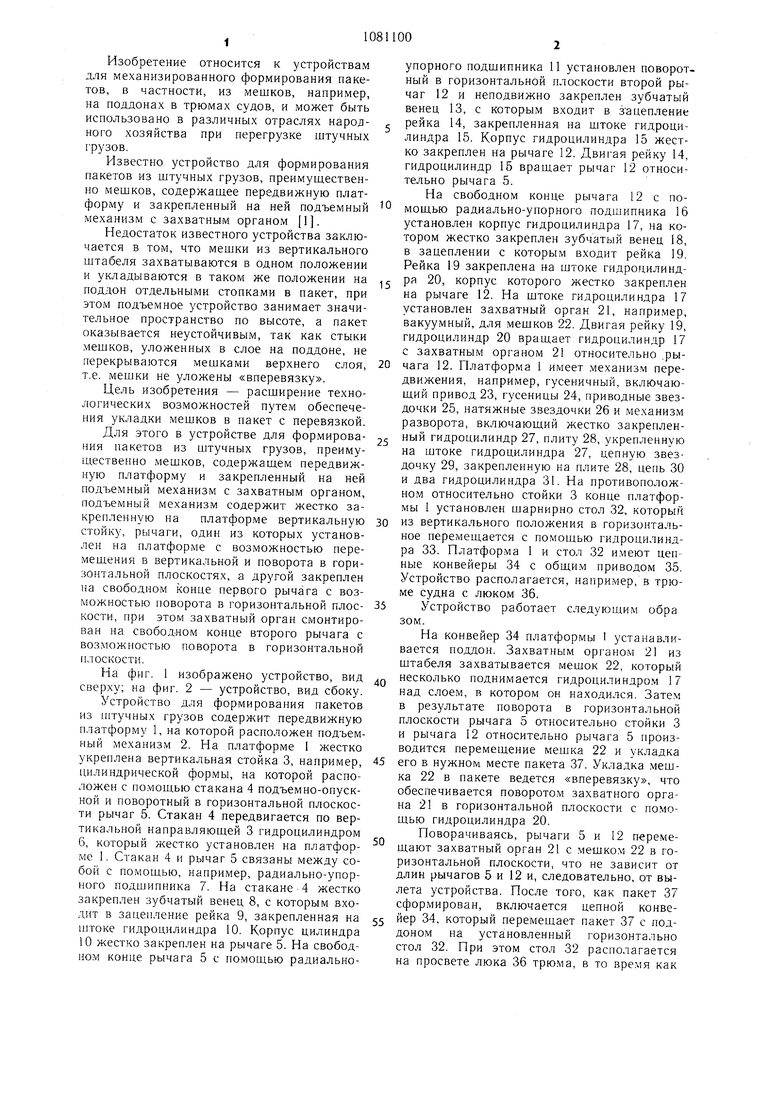

| название | год | авторы | номер документа |
|---|---|---|---|
| Система для пакетирования грузов на поддоны и их транспортирования | 1985 |
|
SU1375543A1 |
| Пакеторазборная машина для штучных грузов | 1990 |
|
SU1768480A1 |
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |
| Устройство для погрузки и разгрузкипАКЕТОВ МЕшКОВ из КРыТыХ ВАгОНОВ | 1979 |
|
SU850535A1 |
| Захватное устройство для груза в тканевых мешках | 1985 |
|
SU1324985A1 |
| Вагон для пакетированных грузов | 1988 |
|
SU1684200A1 |
| Погрузочное устройство для складирования пакетного груза | 1972 |
|
SU541787A1 |
| Устройство для автоматизированной укладки в пакет прямоугольных изделий | 1977 |
|
SU740658A1 |
| Пакетоформирующая установка для мешков | 1982 |
|
SU1049391A1 |
| КОНТЕЙНЕРОВОЗ | 1991 |
|
RU2022832C1 |
УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПАКЕТОВ ИЗ ШТУЧНЫХ ГРУЗОВ,, преимущественно мешков, содержащее передвижную платформу и закрепленный на ней подъемный механизм с захватным органом, отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения укладки мешков в пакет с перевязкой, подъемный механизм содержит жестко закрепленную на платформе вертикальную стойку, рычаги, один из которых установлен на платформе с возможностью перемеш,ения в вертикальной и поворота в .горизонтальной плоскостях, а другой закреплен на свободном конце первого рычага с возможностью поворота в горизонтальной плоскости, при этом захватный орган смонтирован на свободном конце второго рычага с возможностью поворота в горизонтальной плоскости. (Л оо
.-УД 1дГо|I ад11
36
15
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для погрузки и разгрузкипАКЕТОВ МЕшКОВ из КРыТыХ ВАгОНОВ | 1979 |
|
SU850535A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
