Область техники
Настоящее изобретение относится в общем к системе и способу для укладки гибкого материала на груз и, более конкретно, к передвижной системе укладки брезента, приспособленной для установки на вильчатый погрузчик или другие платформы, которая используется для укладки брезента на поднятый груз, например на грузовике с безбортовым кузовом.
Предпосылки для создания изобретения
Общепринятой практикой является укладка брезента или подобного ему гибкого покрытия на груз, помещенный, например, на грузовик с безбортовым кузовом или открытую железнодорожную платформу, чтобы защитить груз во время транспортировки от внешних влияний, таких как дорожная пыль, погодные условия, изменения температуры и т.д. При укладке брезента на грузовике с безбортовым кузовом обычно необходимо, чтобы водитель находился на верху отправляемого груза, чтобы раскатать и правильно расположить брезент. Во многих случаях груз лежит на кузове неровно, и, при высоте груза над поверхностью кузова до 8 футов (2,4 м) создаются условия для угрожающего жизни падения и нанесения травм. Использование системы для подъема брезента признано одним способом предотвращения необходимости работать на верху груза. Известные системы укладки брезента, имеющиеся на рынке, являются стационарными в том смысле, что конструкция имеет прикрепленное к ней подъемное устройство, и перемещать такую систему нельзя. Хотя стационарные посты укладки брезента эффективно помогают укрыть брезентом груз на безбортовых поверхностях, их применение ограничено местонахождением такого поста. При плохой погоде грузовик необходимо закрывать брезентом в помещении перед выездом из него. Если пост расположен вне помещения, то это не имеет значения при плохой погоде. Поскольку на большинстве предприятий участков погрузки несколько, пост укладки брезента должен быть расположен на каждом участке. Конструкция здания на большинстве предприятий подходит для транспортировки грузов, расположенных под крышей и не рассчитана на дополнительные приспособления, особенно подъемные устройства. Таким образом, для добавления постов укладки брезента на предприятии необходимы значительные изменения в конструкции.
Поэтому существует потребность в системе и способе, которые позволяют укладывать брезент на объемный объект, такой как груз на грузовике с безбортовым кузовом, которые устранили бы необходимость в ручном труде на открытой платформе кузова грузовика и были бы безопасными, быстрыми и могли использоваться внутри или снаружи здания без необходимости в значительном объеме ручного труда.
Раскрытие изобретения
Настоящее изобретение направлено на систему и способ, которые обеспечивают средство укладки брезента на груз, например, на грузовике с безбортовым кузовом, и устраняет необходимость в работе водителя или других лиц на верху грузов, этим значительно снижая капитальные расходы, связанные с многочисленными постами укладки брезента и изменениями в конструкции. Настоящее изобретение представляет собой передвижную систему для укладки брезента, прикрепляемую к вильчатому погрузчику или другому передвижному грузоподъемному устройству и имеющую легкое управление для ее транспортировки к грузу. Передвижная система укладки брезента имеет компактную конструкцию, относительно недорогая по сравнению с известным постом для укладки брезента и может использоваться внутри или снаружи здания в любом месте без специальных требований и дополнительных расходов.
Система оборудована лебедкой, питаемой от электрического аккумулятора. Альтернативно, лебедка может быть запитана от других средств, например, гидравлических, и/или пневматических, и/или других. В предпочтительном варианте осуществления изобретения четыре стропа крепежного типа прикреплены к лебедке для подъема брезента; однако, в зависимости от размера системы, можно использовать другое количество стропов. При предпочтительном использовании беспроводного дистанционного управления лебедкой может управлять оператор погрузчика или его помощник, который крепит стропы к брезенту. После установки на погрузчик система работает в пределах ширины (w), которая соответствует стандартной ширине брезента, и может быть сложена до намного меньших габаритов, чтобы облегчить ее транспортировку и хранение, когда она не используется. Процесс укрытия груза брезентом с помощью этой системы может быть легко и безопасно выполнен одним человеком из-за наличия дистанционного управления. Однако при необходимости укрыть брезентом большой объем время на эту операцию может быть значительно сокращено при работе оператора погрузчика и его помощника, который укладывает брезент и соединяет его со стропами на устройстве.
Передвижная система укладки брезента выполнена так, что она может поднимать и удерживать приблизительно 1/3 брезента в горизонтальной плоскости, чтобы минимизировать требования в подъему. Ограничения по высоте для подъема грузов могут иметь очень важное значение в многих закрытых помещениях и могут учитываться даже вне помещения, где преобладающие ветра могут создавать проблемы с устойчивостью автопогрузчика. Систему можно легко модифицировать путем добавления стационарных вертикальных стоек, монтажа основания или катков, чтобы далее уменьшить ограничения по высоте для работы автопогрузчика, если возникнет такая необходимость. Как сказано выше, лебедка может быть запитана не от электрического средства, например, путем прямого соединения с выходом гидросистемы погрузчика. В системе используются четыре подъемных стропа, которые подсоединяют/отсоединяют от брезента вручную. Тросы, канаты, механические манипуляторы и т.д. могут быть использованы для подъема брезента, и для соединения брезента с системой вместо крюков могут быть использованы альтернативные соединители. Могут быть предусмотрены быстроразъемные, работающие от дистанционного управления соединительные механизмы, которые уменьшают объем работы оператора и время, необходимое для размещения брезента на грузе. Система может быть использована в любой ситуации, когда необходимо поместить груз на безбортовый кузов грузовика и укрыть его брезентом для транспортировки. Система может быть легко использована на существующих предприятиях при условии, что на них имеются определенные типы подвижного оборудования (например, вильчатый погрузчик), которое можно оснастить этим приспособлением.
Соответственно, один аспект настоящего изобретения направлен на систему, устанавливаемую на подвижное грузоподъемное транспортное средство для укрытия и/или груза гибким покрытием, таким как брезент, или его снятия. Система включает узел трубчатой рамы с подвижно прикрепленной к ней телескопической рамой. Узел трубчатой рамы включает первую пару направляющих поворотных рычагов, каждый из которых установлен на противоположных сторонах узла трубчатой рамы, причем каждый из направляющих поворотных рычагов соединен с несколькими гибкими элементами. Телескопическая рама способна выдвигаться и/или втягиваться в узле трубчатой рамы. Телескопическая рама включает несколько роликов, способных вращаться при контакте с несколькими гибкими элементами и гибким покрытием. Несколько роликов представляют собой два одинаковых наружных ролика и центральный ролик, причем каждый из роликов соединен с телескопической рамой. Телескопическая рама включает вторую пару направляющих поворотных рычагов, каждый из которых расположен на противоположных сторонах узла трубчатой рамы, и при этом каждый из направляющих поворотных рычагов контактирует с несколькими гибкими элементами. Лебедка соединена с узлом трубчатой рамы и имеет несколько гибких элементов, контактирующих с гибким покрытием для того, чтобы оборачивать и разворачивать груз. Несколько гибких элементов выбирают из группы, состоящей из стропов, тросов, канатов и механических манипуляторов. Лебедка включает узел зубчатой передачи, плиту для установки зубчатых колес, четыре стержневых пальца, узел двигателя лебедки, торцевую плиту, узел барабана и четыре разделительные плиты, которые соединены между собой. Лебедка работает электронно от двух электрических аккумуляторов. Альтернативно, лебедка может работать электронно от подвижного грузоподъемного транспортного средства. Каждый из направляющих поворотных рычагов соединен с соответственным гидроцилиндром, который поворачивает направляющие поворотные рычаги относительно узла трубчатой рамы и/или телескопической рамы. Каждая из первой и второй пары направляющих поворотных рычагов включает соответственную направляющую катушку для стропа, прикрепленную к его соответственным свободным концам, чтобы приводить в действие соответственные стропы. Система кроме того включает устройство силовой передачи, имеющее гидромотор, несколько цепей, поперечный вал, два промежуточных зубчатых колеса, верхнюю направляющую для кулачкового следящего элемента, нижнюю направляющую для кулачкового следящего элемента, боковую направляющую для кулачкового следящего элемента и переднюю направляющую для кулачкового следящего элемента, которые соединены между собой, чтобы обеспечивать выдвижение и/или втягивание телескопической рамы в узле трубчатой рамы во время эксплуатации системы.
Еще один аспект настоящего изобретения направлен на систему, устанавливаемую на вильчатый погрузчик для укладки брезентового покрытия на груз или снятия его с груза. Система включает узел трубчатой рамы, имеющий подвижно прикрепленную к нему телескопическую раму. Телескопическая рама способна выдвигаться и/или втягиваться в узле трубчатой рамы. Каждая из соответственной трубчатой рамы и телескопической рамы определяется двумя параллельными, отстоящими друг от друга на некоторое расстояние продольными трубчатыми штангами, которые на их соответственных концах соединены с соответственной поперечной трубчатой штангой. Устройство силовой передачи установлено на узел трубчатой рамы, чтобы обеспечивать втягивание и/или выдвижение телескопической рамы в узле трубчатой рамы. Лебедка приспособлена для соединения с узлом трубчатой рамы и имеет несколько стропов, соединенных с брезентом, чтобы закрывать и/или раскрывать груз. Лебедка включает узел зубчатой передачи, плиту для установки зубчатых колес, четыре стержневых пальца, узел двигателя лебедки, торцевую плиту, узел барабана и четыре разделительные плиты, которые соединены между собой. Четыре разделительные плиты соединены с узлом барабана параллельно и на некотором расстоянии одна от другой, при этом каждый из стропов расположен между этими четырьмя разделительными плитами. Несколько стропов состоят из четырех одинаковых стропов, которые соединены с возможностью вращения с лебедкой так, что два стропа идут в одном направлении, и два других стропа идут в противоположном направлении при эксплуатации системы.
Еще один аспект настоящего изобретения направлен на систему, устанавливаемую на вильчатый погрузчик для закрывания груза брезентом и/или снятия брезента с груза. Система включает узел трубчатой рамы, имеющий закрепленную в нем раму в форме поддона. Несколько направляющих поворотных рычагов выходят наружу из каждого угла трубчатой рамы и способны выдвигаться и/или втягиваться в узле трубчатой рамы. Несколькими направляющими поворотных рычагов являются четыре направляющих поворотных рычага. Узел трубчатой рамы включает два одинаковых наружных ролика и центральный ролик, причем каждый из двух наружных роликов соединен с двумя соответственными направляющими поворотных рычагов и центральный ролик соединен с одной из четырех трубчатых штанг. Лебедка предназначена для соединения с узлом трубчатой рамы и имеет несколько стропов, соединенных с брезентом, чтобы закрывать и/или раскрывать груз. Несколько стропов представляют собой четыре одинаковых стропа, которые соединены с возможностью вращения с лебедкой таким образом, что два из стропов идут в одном направлении, и два других стропа идут в противоположном направлении при эксплуатации системы. Узел трубчатой рамы представляет собой четыре отстоящие одна от одной трубчатые штанги, которые соединены между собой на соответственных концах, чтобы сформировать трубчатую раму по существу квадратной формы. Рама в форме поддона включает центральную трубу, два продольных трубчатых паза и поперечную трубчатую штангу, причем два продольных трубчатых паза и поперечная штанга параллельны друг другу. Соответственные продольные трубчатые пазы расположены на некотором расстоянии друг от друга и прикреплены на одном конце к одной из четырех трубчатых штанг и на другом конце к центральной трубчатой штанге. Каждый из продольных трубчатых пазов имеет такой размер, чтобы в них входили вилы вильчатого погрузчика. Поперечная штанга прикреплена на одном конце к центральной трубчатой штанге и на противоположном конце к одной из четырех трубчатых штанг.
Еще один аспект настоящего изобретения направлен на способ закрывания груза брезентом, помещенным на кузов грузовика с помощью вильчатого погрузчика. Данный способ включает этапы монтажа системы на вильчатый погрузчик для закрывания груза брезентом посредством выдвижения телескопической рамы из узла трубчатой рамы, при этом несколько гибких элементов растягивают брезент и помещают его поверх груза. Система включает узел трубчатой рамы, имеющий телескопическую раму подвижно закрепленную в нем. Телескопическая рама способна выдвигаться и/или втягиваться в узле трубчатой рамы. Лебедка приспособлена для соединения с узлом трубчатой рамы и имеет несколько гибких элементов, соединяемых с гибким покрытием, чтобы закрывать и/или раскрывать груз. Затем несколько гибких элементов крепят к брезенту, и последний поднимается системой для размещения поверх груза.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Некоторые детали на чертежах объяснены ниже, чтобы обеспечить достаточное понимание вариантов осуществления изобретения. Однако специалисту в данной области техники будет понятно, что варианты осуществления изобретения могут быть осуществлены на практике без нескольких из этих конкретных деталей. Например, хорошо известные особенности вильчатых погрузчиков, лебедок, гидроцилиндра, контуров, сигналов управления, вычислительных компонентов и операций программного обеспечения подробно не описаны, чтобы избежать ненужного усложнения описанных вариантов осуществления изобретения. Вышеизложенные аспекты и другие признаки изобретения объяснены в приведенном ниже описании в связи с прилагаемыми чертежами, на которых:
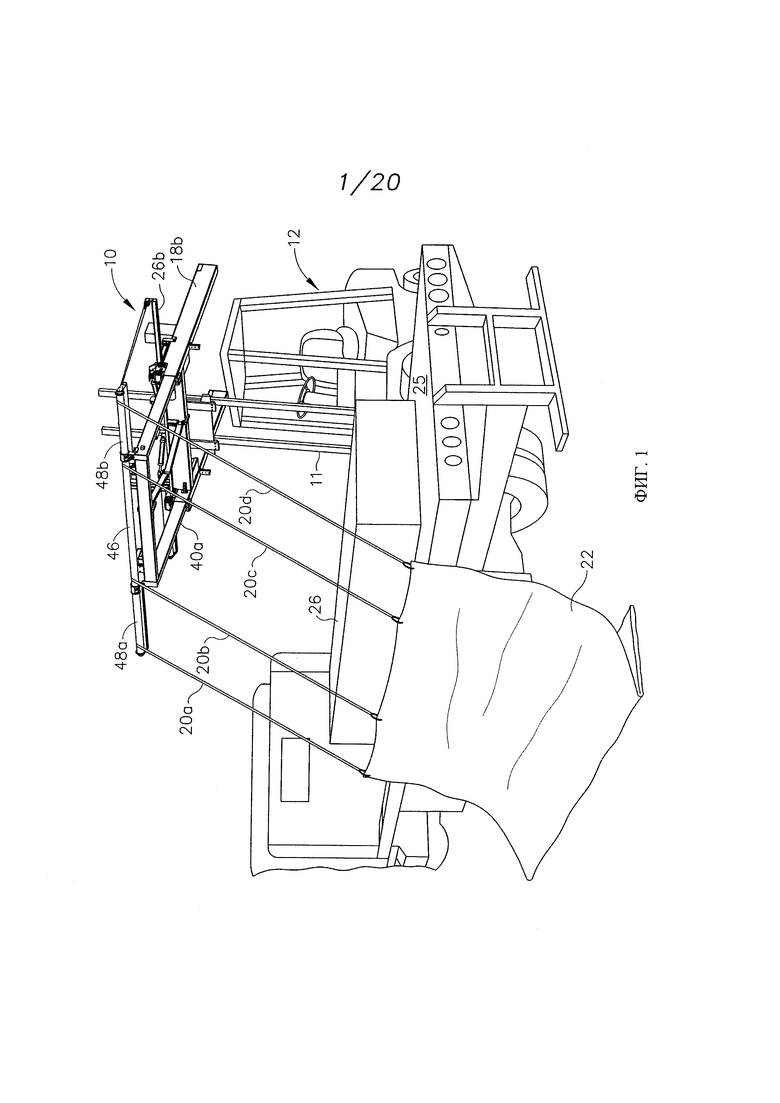
Фиг. 1 - перспективный вид системы, устанавливаемой на вильчатый погрузчик, который иллюстрирует работу системы при укладке брезента на груз в соответствии с предпочтительным вариантом осуществления изобретения;
Фиг. 2 - то же, что и на Фиг. 1 - показан груз, полностью укрытый брезентом с помощью системы, выполненной в соответствии с настоящим изобретением;
Фиг. 3А - покомпонентный перспективный вид системы с Фиг. 1 и 2 без вильчатого погрузчика, причем система включает узел трубчатой рамы и телескопическую раму в соответствии с предпочтительным вариантом осуществления изобретения;
Фиг. 3В - перспективный вид сверху системы в сборе с Фиг. 3А, показывающий первую и вторую пары направляющих поворотных рычагов в вертикальном положении в соответствии с предпочтительным вариантом осуществления изобретения;
Фиг. 3С - перспективный вид сзади и сверху системы в сборе с Фиг. 3А;
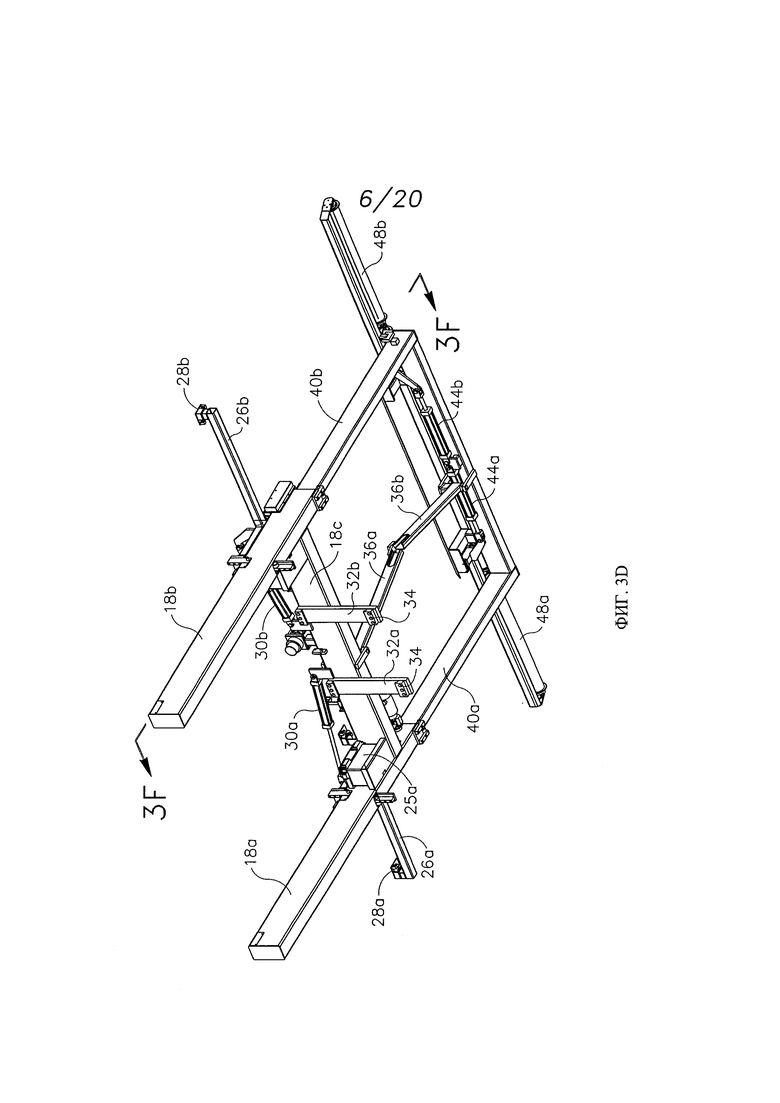
Фиг. 3D - перспективный вид сзади и снизу системы в сборе с Фиг. 3А;
Фиг. 3Е - перспективный вид спереди и снизу системы в сборе с Фиг. 3А;
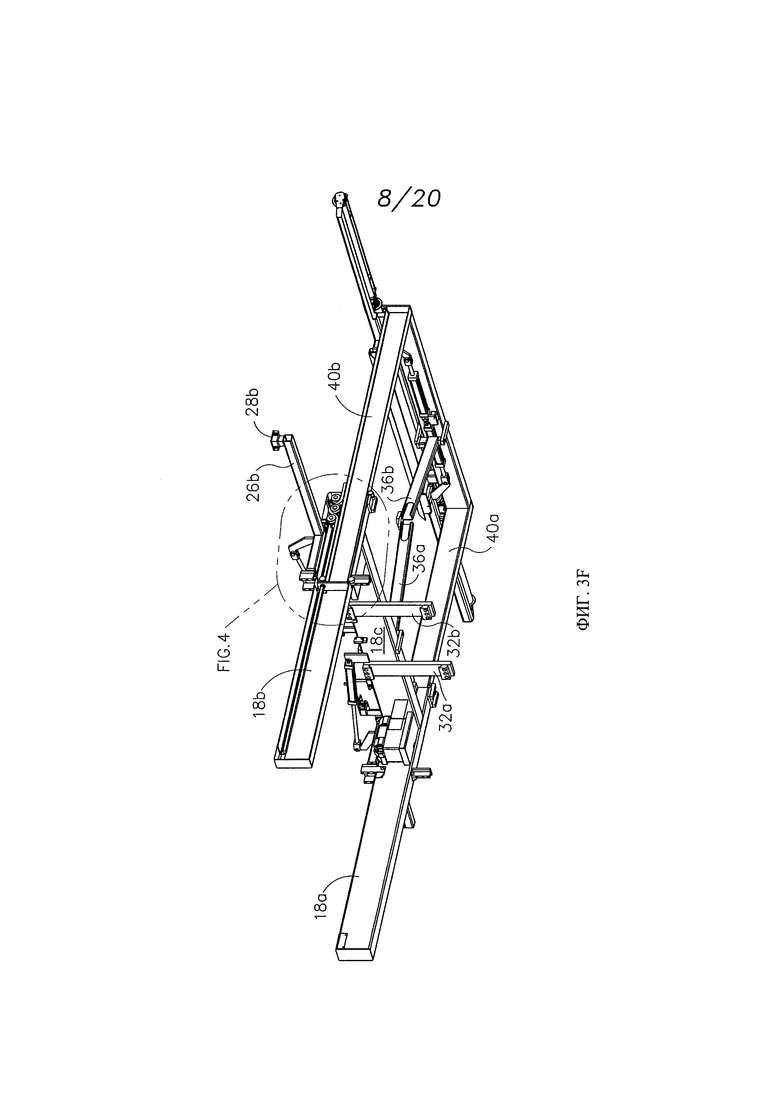
Фиг. 3F - частично открытый перспективный вид сбоку системы в сборе с Фиг. 3D;
Фиг. 4 - увеличенный вид части с Фиг. 3F, показывающий часть устройства силовой передачи, обеспечивающей выдвижение и втягивание телескопической рамы;
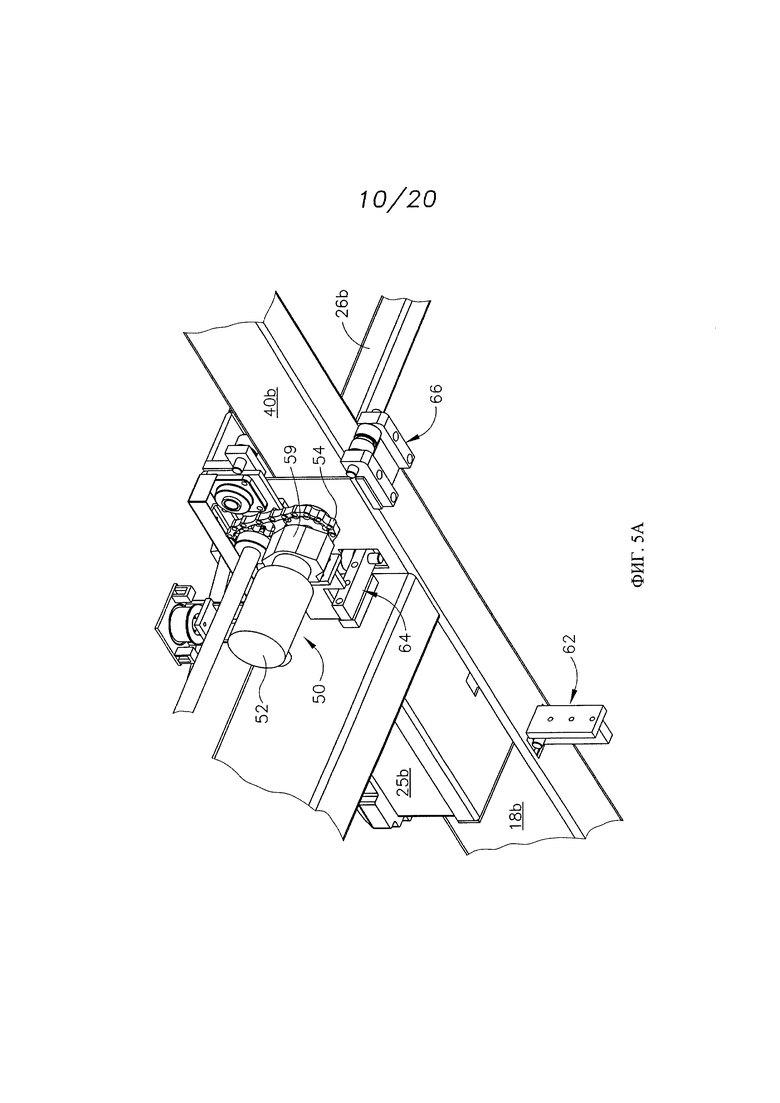
Фиг. 5А - увеличенный вид части с Фиг. 3Е, показывающий перспективный вид снизу устройства силовой передачи в соответствии с предпочтительным вариантом осуществления изобретения;
Фиг. 5В - покомпонентный перспективный вид устройства силовой передачи с Фиг. 5А, показывающий компоненты устройства силовой передачи в пространственном отношении друг к другу;
Фиг. 6А - увеличенный вид части с Фиг. 3Е, показывающий перспективный вид сверху лебедки в соответствии с предпочтительным вариантом осуществления изобретения;
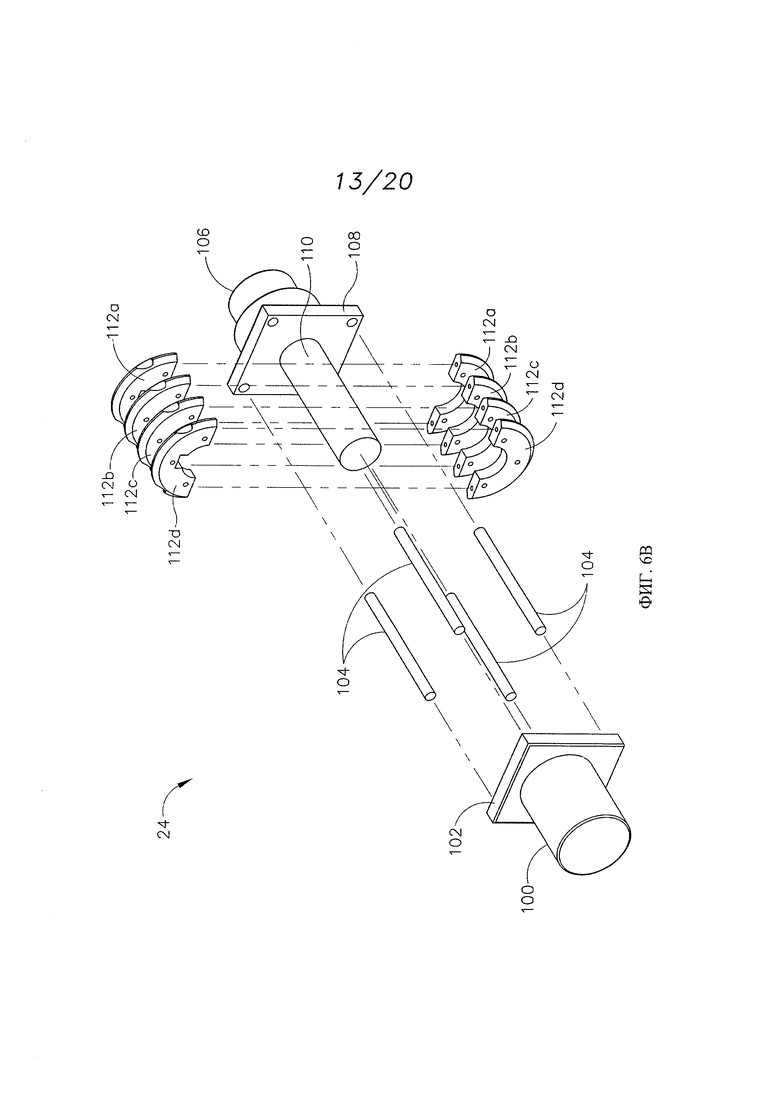
Фиг. 6В - покомпонентный перспективный вид лебедки с Фиг. 5А, показывающий компоненты лебедки в пространственном отношении друг к другу;
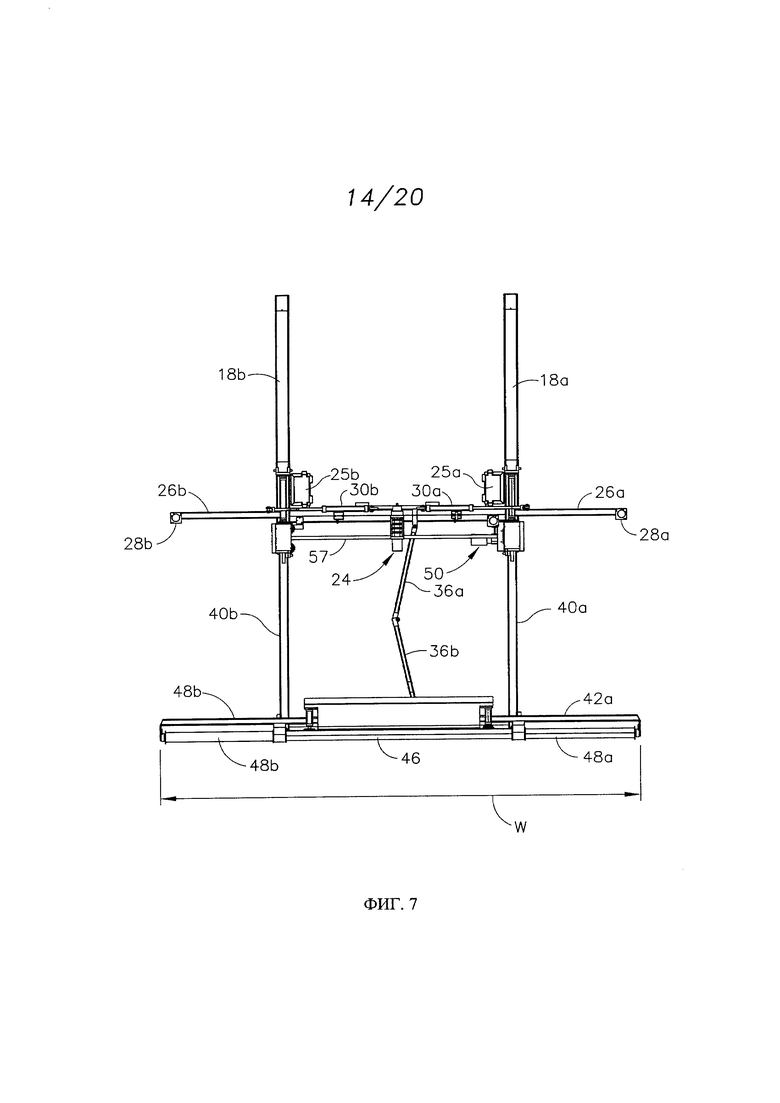
Фиг. 7 - вид сверху в плане системы с Фиг. 1 и 2;
Фиг. 8А - перспективный вид системы в сборе с Фиг. 3В, показывающий четыре подъемных стропа, прикрепленных к ней с двумя поворотными рычагами узла трубчатой рамы в вертикальном сложенном положении и два поворотных рычага телескопической рамы в разложенном положении;
Фиг. 8В - то же, что и на Фиг. 8А, показывает все четыре поворотных рычага узла трубчатой рамы и телескопической рамы в разложенном положении;
Фиг. 8С - то же, что и на Фиг. 8В, показывает телескопическую раму во втянутом положении;
Фиг. 8D - вертикальная проекция спереди системы с Фиг. 3С; и
Фиг. 9А и 9В - соответственные перспективные виды сзади и спереди альтернативной системы в соответствии с вторым вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Для облегчения понимания принципов изобретения дальше будут приведены ссылки на варианты осуществления, показанные на чертежах, и для их описания будут использованы специфические термины. Тем не менее, следует понимать, что это не вводит какое-либо ограничение объема изобретения. Изобретение включает любые изменения и дальнейшие модификации показанных устройств и описанных способов и другие применения принципов изобретения, которые обычно были бы очевидны для специалиста в области, к которой относится изобретение.
На Фиг. 1 приведен перспективный вид передвижной системы укладки брезента 10, устанавливаемой на транспортное и грузоподъемное средство, такое как вильчатый погрузчик 12, и используемой для закрывания груза 26 брезентом 22, и на Фиг. 2 показано, что груз 26 полностью укрыт брезентом 22 на безбортовом кузове 25 с помощью показанной передвижной системы укладки брезента 10. Передвижная система укладки брезента 10 приспособлена для подъема и удержания приблизительно 1/3 брезента 22 в горизонтальной плоскости, чтобы минимизировать требования к подъему грузов. Хотя 1/3 брезента 22 в горизонтальной плоскости не требуется для работы системы 10, но, как будет понятно специалисту в данной области техники, 1/3 брезента 22 в горизонтальной плоскости предпочтительна. Ограничения по высоте подъема могут иметь очень важное значение для многих закрытых помещений и могут учитываться даже при применении вне помещения, где преобладающие ветра могут создавать проблемы с устойчивостью погрузчика. Систему 10 можно легко модифицировать путем добавления стационарных стоек, основания или роликов, чтобы далее уменьшить ограничения по высоте подъема для погрузчика, если это необходимо. В системе 10 использованы четыре подъемных стропа 20а, 20b, 20с и 20d, которые вручную подсоединяют к брезенту или отсоединяют от него. В предпочтительном варианте осуществления изобретения использованы четыре подъемных стропа 20а, 20b, 20с и 20d, но можно использовать любое число подъемных стропов. Тросы, канаты, механические манипуляторы и т.д. могут быть использованы для подъема брезента 22, и вместо крюков могут быть применены альтернативные соединители, чтобы соединить брезент с системой. Могут быть предусмотрены быстроразъемные, работающие от дистанционного управления соединительные механизмы, которые уменьшают объем работы оператора и время, необходимое для размещения брезента на грузе 26. Система 10 может быть использована в любой ситуации, когда необходимо поместить груз на безбортовый кузов 25 грузовика и укрыть его брезентом для транспортировки. Система 10 может быть легко использована на существующих предприятиях при условии, что на них имеются определенные типы подвижного оборудования (например, вильчатый погрузчик), которое можно оснастить этим приспособлением.
На Фиг. 3А приведен покомпонентный перспективный вид передвижной системы укладки брезента 10 без вильчатого погрузчика 12, и на Фиг. 3A-3F приведен перспективный вид передвижной системы укладки брезента 10 в сборе, показывающий ее с разных направлений в соответствии с предпочтительным вариантом осуществления изобретения. В настоящем изобретении термин "вильчатый погрузчик" использован для обозначения разных типов транспортных и грузоподъемных средств и не ограничен стандартным вильчатым погрузчиком, используемым в настоящем документе только для иллюстративных целей. Система 10 обычно включает узел трубчатой рамы 14, имеющий подвижно прикрепленную к нему телескопическую раму 16. Узел трубчатой рамы 14 выполнен таким образом, что телескопическая рама 16 может быть по существу скрыта в нем, когда система 10 не эксплуатируется. Узел трубчатой рамы 14 может быть изготовлен из любого материала, подходящего для получения жесткой конструкции минимальной массы, например, из алюминия и/или углеродистой стали. В показанном варианте осуществления узел трубчатой рамы 14 включает две параллельные, отстоящие одна от другой на некоторое расстояние, продольные трубчатые штанги 18а, 18b, которые соединены между собой на соответственных концах поперечной штангой 18с. На узел трубчатой рамы 10 установлены несколько компонентов, которые обеспечивают работу системы 10, описанную более подробно ниже. Например, в системе 10 использованы четыре подъемных стропа 20а, 20b, 20с и 20d, которые вручную подсоединяют к брезенту 22 или отсоединяют от него. Система 10 оборудована лебедкой 24, которая захватывает четыре подъемных стропа 20а, 20b, 20с и 20d, чтобы укрыть груз 26 брезентом 22, как лучше всего показано на Фиг. 8А и 8В. Лебедка 24 работает от двух электрических аккумуляторов 25а, 25b, каждый из которых закреплен на противоположной стороне узла трубчатой рамы (см. Фиг. 3В). Лебедка 24 прикреплена к поперечной штанге 18 с узла трубчатой рамы 14, как будет более подробно описано ниже. Узел трубчатой рамы 14 включает первую пару направляющих поворотных рычагов 26а, 26b, каждый из которых прикреплен к соответственной продольной трубчатой штанге 18а, 18b. Каждый из направляющих поворотных рычагов 26а, 26b поворачивается наружу относительно узла трубчатой рамы 14, когда поворотные рычаги находятся в выдвинутом положении, и каждый из поворотных рычагов 26а, 26b расположен вертикально, когда он находится в сложенном положении.
Использованы две пары гидроцилиндров, определенные как первая пара гидроцилиндров 30а, 30b и вторая пара гидроцилиндров 44а, 44b, при этом первая пара гидроцилиндров 30а, 30b установлена на узел трубчатой рамы 14. Вторая пара гидроцилиндров 44а, 44b установлена на телескопическую раму 16, как будет описано ниже. Каждый из гидроцилиндров 30а, 30b первой пары вызывает поворот соответственных поворотных рычагов 26а, 26b при работе системы 10. Один конец каждого из гидроцилиндров 30а, 30b прикреплен к поперечной штанге 18с, и противоположный конец прикреплен к соответственным поворотным рычагам 26а, 26b. Две пары гидроцилиндров 30а, 30b и 44а, 44b приводятся в действие давлением гидравлической жидкости, поступающей по линиям гидравлической жидкости (не показаны), которые соединены с соответствующими выходами гидравлической мощности, обычно имеющимися на вильчатом погрузчике 12. Обычно на вильчатый погрузчик 12 установлен контроллер (не показан), чтобы контролировать расход гидравлической жидкости в гидравлических линиях. Следует понимать, что система гидравлического привода может быть автономной системой, смонтированной на самой системе 10, и в таком случае только контроллер доступен оператору вильчатого погрузчика 12. Однако большинство вильчатых погрузчиков или других транспортных и грузоподъемных средств обычно имеют полные гидравлические системы с подходящими выходами гидравлической энергии, и поэтому наличие полностью автономной системы гидравлического привода на системе 10 будет необязательным в большинстве применений. Каждый из направляющих поворотных рычагов 26а и 26b включает первую направляющую катушку для стропа 28а, 28b, которая закреплена на соответственном дальнем конце поворотных рычагов и направляет соответственный строп 20а-20d во время работы системы 10. Подобно этому, пара направляющих катушек для строп 29а, 29b закреплена на дальних концах поперечной штанги 18 с и направляет соответственные подъемные стропы 20b и 20с во время работы системы 10. Направляющие поворотные рычаги 26а и 26b и направляющие катушки для строп 28а, 28b, 29а, 29b могут быть изготовлены из любого материала, подходящего для получения жесткой конструкции минимальной массы, например из алюминия и/или углеродистой стали. Узел трубчатой рамы 14 кроме того включает пару монтажных плит 32а, 32b, которые отходят под прямым углом от поперечной штанги 18 с и прикреплены к шасси 11 вильчатого погрузчика 12 подходящими средствами, например, болтами, проходящими через отверстия 34, как лучше всего показано на Фиг. 3С.
Телескопическая рама 16 может быть изготовлена из любого материала, подходящего для получения жесткой конструкции минимальной массы, например, из алюминия и/или углеродистой стали. В показанном варианте осуществления, телескопическая рама 16 включает две параллельных, отстоящих одна от другой на некоторое расстояние продольных трубчатых штанги 40а, 40b, которые соединены между собой на соответственных концах поперечной штангой 40с. Телескопическая рама 16 выполнена так, что она втягивается и/или выдвигается в узле трубчатой рамы 14 с помощью устройства силовой передачи 50, которое лучше всего показано на Фиг. 14 и описано более подробно ниже. Внутренний удлинительный рычаг 36а и наружный удлинительный рычаг 36b предназначены для защиты шланговых линий гидравлической жидкости, которые подают гидравлическую жидкость на вторую пару гидроцилиндров 44а, 44b. Внутренний удлинительный рычаг 36а и наружный удлинительный рычаг 36b соединены между собой регулируемым болтом 38, который позволяет двум рычагам 36а, 36b поворачиваться относительно друг друга, как показано на Фиг. 3В. Внутренний удлинительный рычаг 36а на одном конце прикреплен к узлу трубчатой рамы 14 и на противоположном конце соединен с наружным удлинительным рычагом 36b посредством регулируемого болта 38 с Фиг. 3А. Подобно этому, наружный удлинительный рычаг 36b на одном конце прикреплен к телескопической раме 16 и на противоположном конце соединен с наружным удлинительным рычагом посредством регулируемого болта 38. Телескопическая рама 16 включает вторую пару направляющих поворотных рычагов 42а, 42b, каждый из которых прикреплен к соответственной продольной трубчатой штанге 40а, 40b. Каждый из второй пары направляющих поворотных рычагов 42а, 42b поворачивается наружу относительно телескопической рамы 16, когда поворотные рычаги находятся в выдвинутом положении, и каждый из поворотных рычагов 42а, 42b расположен вертикально, когда они находятся в вертикальном сложенном положении, как показано на Фиг. 3А. Следует сказать, что каждый из первой пары направляющих поворотных рычагов 26а и 26b и каждый из второй пары направляющих поворотных рычагов 42а, 42b способны независимо поворачиваться относительно друг друга. Вторая пара гидроцилиндров 44а и 44b установлена на трубчатой телескопической раме 16, причем каждый из соответственных гидроцилиндров 44а, 44b заставляет поворачиваться поворотные рычаги 42а, 42b второй пары во время работы системы 10. Гидроцилиндры 44а, 44b защищены ограждением 44, показанным на Фиг. 3 и лучше всего видимым на Фиг. 10. Одним концом гидроцилиндры 44а, 44b прикреплены к поперечной штанге 40 с и противоположным концом к соответственному поворотному рычагу 42а, 42b второй пары. Гидроцилиндры 44а, 44b работают под управлением вильчатого погрузчика 12. Средний специалист в данной области техники поймет, что две пары гидроцилиндров 30а, 30b и 44а, 44b альтернативно могут работать под беспроводным управлением системы 10 с использованием имеющихся в продаже устройств. Телескопическая рама 16 кроме того включает три ролика, определенные как центральный ролик 46 и два наружных ролика 48а, 48b, которые изготовлены из трубной стали или ей подобного материала. Центральный ролик 46 соединен с поперечной штангой 40 с и каждый из наружных роликов 48а, 48b соединен с соответственным направляющим поворотным рычагом 42а, 42b второй пары, соответственно. Центральный ролик 46 продольно выровнен с поперечной штангой 40с, и соответственные наружные ролики 48а, 48b продольно выровнены с направляющими поворотными рычагами 42а, 42b второй пары. Центральный ролик 46 и два наружных ролика 48а, 48b используются для контакта с четырьмя подъемными стропами 20а, 20b, 20с и 20d, чтобы облегчить укладку брезента 22 на груз 26 при эксплуатации системы 10. В показанном варианте осуществления передвижная система для укладки брезента 10 включает устройство силовой передачи 50 (показано в деталях на Фиг. 3Е, 4, 5А, 5В), которое обеспечивает линейное перемещение (т.е., втягивание и/или выдвижение) телескопической рамы 16 в узле трубчатой рамы 14 при эксплуатации системы 10.
Теперь со ссылкой на Фиг. 5А, где показан увеличенный перспективный вид снизу устройства силовой передачи 50, показанного на Фиг. 3А, 3В, 3Е, и Фиг. 5В, где показаны компоненты, которые образуют устройство силовой передачи с Фиг. 5А. Устройство силовой передачи 50 включает гидромотор 52, цепь 54, поперечный вал 56, два промежуточных зубчатых колеса 58а (Фиг. 5В), 58b (Фиг. 4), верхнюю направляющую для кулачкового следящего элемента 60, нижнюю направляющую для кулачкового следящего элемента 62, боковую направляющую для кулачкового следящего элемента 64, и переднюю направляющую для кулачкового следящего элемента 66, которые соединены между собой для обеспечения линейного перемещения (т.е., втягивания и/или выдвижения) телескопической рамы 16 в узле трубчатой рамы 14 при эксплуатации системы 10. Поперечный вал 56 включает поперечный вал 57, три зубчатых колеса 68, 70, 72 и два фланца 74 и 76, которые соединены друг с другом. На одном конце поперечный вал 57 соединен с промежуточным зубчатым колесом 58а посредством фланца 76, и на другом конце он соединен с промежуточным зубчатым колесом 58b (Фиг. 4) посредством фланца 74 на противоположной стороне узла трубчатой рамы 14 и позволяет промежуточному зубчатому колесу 58а и промежуточному зубчатому колесу 58b быть в синхронизации друг с другом. На соответственных противоположных дальних концах поперечного вала 57 расположены зубчатые колеса 70, 72 и соответственные опорные подшипники 77, 71, причем зубчатое колесо 70 и опорный подшипник 77 расположены внутри промежуточного зубчатого колеса 58а, а зубчатое колесо 72 и опорный подшипник 71 расположены внутри промежуточного зубчатого колеса 58b. С другой стороны, зубчатое колесо 68 и опорный подшипник 69 расположены снаружи промежуточного зубчатого колеса 58а. Гидромотор 52 включает концевой переходник 80, зубчатое колесо 82 и опорный подшипник 83, который прикреплен к приводному валу гидромотора (не показан). Концевой переходник 80 обычно позволяет легко соединить электродвигатель с зубчатым редуктором и муфтами, которые обычно будут сопряжены с гидромотором, или с цепью, или с ремнем и шкивами вместо прямого подключения гидромотора. Два зубчатых колеса 68 и 82 соединены друг с другом цепью 54, чтобы вращение приводного вала гидромотора вызывало вращение поперечного вала 57 в том же направлении. Соответственно, вращение поперечного вала 57 вызывает вращение двух зубчатых колес 70 и 72 с линейными цепями 86а, 86b в зацеплении с ними, чтобы таким образом перемещать телескопическую раму 16 линейно в узле трубчатой рамы 14 при эксплуатации системы 10. Зубчатые колеса 70, 72 и линейные цепи 86а, 86b включены в соответственные узлы промежуточных зубчатых колес 58а, 58b (Фиг. 4, 5В), и, таким образом, защищены от внешних элементов. Каждая из соответственных линейных цепей 86а, 86b входит в зацепление с соответственным узлом трубчатой рамы 14 и телескопической рамы 16. Использованы четыре пары опорных подшипников 90а, 90b и 90с, 90d, причем опорные подшипники 90а, 90b расположены на противоположных сторонах поперечного вала 57 внутри узла промежуточного зубчатого колеса 58а, и опорные подшипники 90с, 90d расположены на противоположных сторонах поперечного вала 57 внутри узла промежуточного зубчатого колеса 58b. Каждая из пар опорных подшипников 90а, 90b, 90с и 90d включает соответствующий соединительный стержень 92, который соединен с кожухом соответственного узла зубчатого колеса 58а, 58b. Каждая из пар опорных подшипников 90а, 90b, 90 с и 90d кроме того включает зубчатые колеса 88а, 88b, 88с и 88d, которые находятся в зацеплении с линейными цепями 86а, 86b, чтобы обеспечить линейное движение телескопической рамы 16 в узле трубчатой рамы 14. Верхняя направляющая для кулачкового следящего элемента 60, нижняя направляющая для кулачкового следящего элемента 62, боковая направляющая для кулачкового следящего элемента 64 и передняя направляющая для кулачкового следящего элемента 66 прикреплены к соответственным продольным трубчатым штангам 18а и 18b на противоположных сторонах узла трубчатой рамы 14, чтобы направлять линейное движение телескопической рамы 16 при эксплуатации системы 10.
На Фиг. 6А представлен увеличенный вид лебедки 24 в сборе с Фиг. 3А-3Е, и на Фиг. 6 В приведен вид компонентов лебедки 24 с Фиг. 6А в соответствии с предпочтительным вариантом осуществления изобретения. Лебедка 24 приспособлена для зацепления с четырьмя подъемными стропами 20а, 20b, 20с и 20d, чтобы автоматически поднимать брезент 22 и закрывать груз 26 на плоском кузове 25 грузовика. Лебедка 24 включает узел зубчатой передачи 100, плиту для установки зубчатых колес 102, четыре стержневых пальца 104, узел двигателя лебедки 106, торцевую плиту 108, узел барабана 110 и четыре разделительные плиты 112а, 112b, 112с и 112d, отстоящие на некоторое расстояние одна от другой без сжатия. Четыре разделительные плиты 112а, 112b, 112с и 112d сжимаются вокруг приводного вала 110, как показано на Фиг. 6А. Узел зубчатой передачи 100 включает зубчатое и зажимное устройство, и кожух 106 двигателя лебедки включает электродвигатель. Узел барабана 110 вращается по часовой стрелке или против часовой стрелки посредством двигателя и системы зубчатых колес. Четыре разделительные плиты 112а, 112b, 112с и 112d используются для разделения соответственных четырех подъемных стропов 20а, 20b, 20с и 20d, как лучше всего показано на Фиг. 6А. Четыре пальца 104 используются для сборки узла зубчатой передачи 100 с двигателем в кожухе 106 с применением установочной плиты 102 и торцевой плиты 108. Узел барабана 110 окружен четырьмя пальцами 104 между узлом зубчатой передачи 100 и двигателем в кожухе 106.
На Фиг. 7 представлен вид в плане сверху системы 10 с Фиг. 1 и 2. Передвижная система укладки брезента 10 работает в пределах ширины (w), которая соответствует стандартной ширине брезента, и может быть сложена до намного меньших габаритов, чтобы облегчить ее транспортировку и хранение, когда она не используется. Среднему специалисту в данной области техники будет понятно, что ширина (w) системы может быть изменена при использовании брезента нестандартного размера. Процесс укрытия груза брезентом с помощью этой системы может быть легко и безопасно выполнен одним человеком из-за наличия дистанционного управления лебедкой, если таковое имеется. Однако при необходимости укрыть брезентом большой объем время на эту операцию может быть значительно сокращено при работе оператора погрузчика и его помощника, который укладывает брезент и соединяет его со стропами на устройстве.
На Фиг. 8А приведен перспективный вид системы в сборе 10 с Фиг. 3А, показывающий четыре подъемных стропа 20а, 20b, 20с и 20d, прикрепленных к ней, с двумя поворотными рычагами 26а, 26b узла трубчатой рамы 14 в вертикальном сложенном положении и двумя поворотными рычагами 42а, 42b телескопической рамы в разложенном положении. Показаны форма и направления четырех подъемных стропов 20а, 20b, 20с и 20d, чтобы показать, что два подъемных стропа 20а, 20b идут в одном направлении относительно лебедки 24, и два других подъемных стропа 20с и 20d идут в противоположном направлении относительно двух подъемных стропов 20а, 20b. При эксплуатации два направляющих поворотных рычага могут быть выдвинуты наружу или втянуты телескопической рамой 26 для облегчения управления системой при укладке брезента 22 на груз 26, как лучше всего показано на Фиг. 8С и 8D. За исключением устройства силовой передачи 50, которое расположено на одной стороне узла трубчатой рамы 14, передвижная система для укладки брезента 10 в общем симметрична относительно продольной оси.
Для того, чтобы использовать передвижную систему укладки брезента 10 для укладки брезента 22 или сходного гибкого покрытия на груз 26, размещенный на грузовике с безбортовым кузовом 25 или на железнодорожной платформе, чтобы, например, защитить груз во время транспортировки, сначала передвижную систему укладки брезента 10 необходимо смонтировать на вильчатый погрузчик 12, как показано на Фиг. 1 и 2. Когда телескопическая рама 16 будет полностью выдвинута, и каждый из четырех подъемных стропов 20а, 20b, 20с и 20d будет прикреплен к брезенту 22 с возможностью отсоединения, используют лебедку 24 для подъема и удержания приблизительно 1/3 брезента в горизонтальной плоскости, пока передвижная система для укладки брезента 10 расположена над грузом. Затем оператор маневрирует на вильчатом погрузчике 12, немного удаляясь от кузова грузовика, пока система 10 укладывает брезент 22 на груз 26, соответственно. Далее, четыре подъемных стропа 20а, 20b, 20с и 20d отсоединяют от брезента 22 и закрепляют края брезента на сторонах плоского кузова грузовика 25.
На Фиг. 9А приведен перспективный вид сзади альтернативной передвижной системы укладки брезента 120, и на Фиг. 9В - перспективный вид спереди альтернативной передвижной системы укладки брезента 120 в соответствии с вторым вариантом осуществления настоящего изобретения. Передвижную систему укладки брезента 120 монтируют на транспортное и грузоподъемное средство, такое как вильчатый погрузчик 12 (Фиг. 1) для закрывания груза 26 брезентом 22. Передвижная система укладки брезента 120 выполнена с возможностью поднимать и удерживать приблизительно 1/3 брезента 22 в горизонтальной плоскости, чтобы минимизировать требования к подъему грузов. Ограничения по высоте подъема могут иметь очень важное значение для многих закрытых помещений и могут учитываться даже при применении вне помещения, где преобладающие ветра могут создавать проблемы для устойчивости погрузчика. Передвижная система укладки брезента 120 может быть легко модифицирована путем добавления стационарных стоек, монтажа основания или роликов, чтобы далее уменьшить ограничения по высоте подъема для вильчатого погрузчика, если это необходимо. В системе 120 использованы четыре подъемных стропа 20а', 20b', 20с' и 20d', которые вручную подсоединяют к брезенту 22 и отсоединяют от него, как на Фиг. 9В. Тросы, канаты, механические манипуляторы и т.д. могут быть использованы для подъема брезента 22, и для соединения брезента с системой могут быть использованы альтернативные соединители вместо крюков. Могут быть предусмотрены быстроразъемные, работающие от дистанционного управления соединительные механизмы, которые уменьшают объем работы оператора и время, необходимое для размещения брезента на грузе 26. Система 120 может быть использована в любой ситуации, когда необходимо поместить груз на безбортовый кузов грузовика 25 и укрыть его брезентом для транспортировки. Система 120 может быть легко использована на существующих предприятиях при условии, что на них имеются определенные типы подвижного оборудования (например, вильчатый погрузчик), которое можно оснастить этим приспособлением.
Передвижная система укладки брезента 120 обычно включает узел трубчатой рамы 122 с выполненным в ней рамой в форме поддона 124. Узел трубчатой рамы 122 выполнен таким образом, что рама в форме поддона 124 расположена внутри узла трубчатой рамы 122. Узел трубчатой рамы 122 и рама в форме поддона 124 могут быть изготовлены из любого материала, подходящего для получения жесткой конструкции минимальной массы, например, из алюминия и/или углеродистой стали. В показанном варианте осуществления, узел трубчатой рамы 122 включает четыре отстоящие одна от другой на некоторое расстояние трубчатые штанги 126а, 126b, 126с, 126d, которые соединены между собой на соответственных концах, чтобы образовать раму по существу квадратной формы. Рама в форме поддона 124 образована центральной трубчатой штангой 130, двумя продольными трубчатыми пазами 132а, 132b и поперечной трубчатой штангой 134. Поперечная штанга 134 крепится на одном конце к центральной трубчатой штанге 130 и на противоположном конце к трубчатой штанге 126с. Соответственные концы центральной трубчатой штанги 130 крепятся к соответственным трубчатым штангам 126а, 126b. Соответственные продольные трубчатые пазы 132а, 132b отстоят друг от друга на некоторое расстояние и прикреплены (например, болтами или сваркой) на одном конце к трубчатой штанге 126с и на другом конце к центральной трубчатой штанге 130. Продольные трубчатые пазы 132а, 132b и поперечная штанга 134 параллельны друг другу. Каждый из продольных трубчатых пазов 132а, 132b имеет такие размеры, чтобы в него могли входить вилы обычного вильчатого погрузчика. В показанном варианте осуществления передвижная система укладки брезента 120 может быть поднята или расположена так, чтобы разместить брезент 22 на грузе 26 грузовика с безбортовым кузовом. Система 120 оборудована лебедкой 24', которая соединена с четырьмя подъемными стропами 20а', 20b', 20с' и 20d для укладки брезента 22 на груз 26, как лучше всего показано на Фиг. 9 В. Лебедка 24' прикреплена к трубчатой штанге 126 с посредством трубчатой площадки 128. Лебедка 24' работает от двух электрических аккумуляторов 25а', 25b', каждый из которых прикреплен к соответствующей удерживающей плите 136а, 136b. Удерживающие плиты 136а, 136b надежно прикреплены к поперечной штанге 134. Узел трубчатой рамы 122 включает две пары направляющих поворотных рычагов 138а, 138b, 140а, 140b, при этом поворотные рычаги 138а, 140а прикреплены к продольной трубчатой штанге 126а, и поворотные рычаги 138b, 140b прикреплены к продольной трубчатой штанге 126b. Каждая из двух пар поворотных рычагов 138а, 138b, 140а и 140b закреплена на соответствующем углу рамы 122 квадратной формы.
Каждый из направляющих поворотных рычагов 138а, 138b, 140а и 140b поворачивается наружу относительно узла трубчатой рамы 122, когда поворотные рычаги находятся в выдвинутом положении. Соответственные поворотные рычаги 138а, 140а и соответственные поворотные рычаги 138b, 140b выровнены относительно трубчатых штанг 126а, 126b перекрывающим образом, когда они находятся в сложенном положении. Каждый из направляющих поворотных рычагов 138а, 138b, 140а и 140b включает соответственную тягу 142а, 142b, 142с и 142d, которая используется для удержания соответственного поворотного рычага 138а, 138b, 140а и 140b в выдвинутом зафиксированном положении с помощью стопорного пальца (не показан). Каждый из направляющих поворотных рычагов 138а и 138b включает соответственную направляющую катушку для стропа 144а, 144b, которая закреплена на соответственном дальнем конце поворотных рычагов 138а и 138b и направляет соответственным строп 20а', 20d' во время работы системы 120. Подобно этому используются две направляющие катушки для стропов 146а, 146b, каждая из которых закреплена на соответственном конце 126а, 126b и направляет соответственный строп 20b', 20с' во время работы системы 120. Направляющие поворотные рычаги 138а и 138b и направляющие катушки для стропов 144а, 144b, 146а, 146b могут быть изготовлены из любого материала, подходящего для получения жесткой конструкции минимальной массы, например, из алюминия и/или углеродистой стали. Узел трубчатой рамы 122 кроме того включает три ролика, определенные как центральный ролик 46' и два наружных ролика 48а', 48b', которые изготовлены из трубной стали или подобного материала. Центральный ролик 46' соединен с трубчатой штангой 126d и каждый из соответственных наружных роликов 48а', 48b' соединен с направляющим поворотным рычагом 140а, 140b второй пары, соответственно. Центральный ролик 46' продольной выровнен с трубчатой штангой 126d, и соответственный наружный ролик 48а', 48b' продольной выровнен с соответственным направляющим поворотным рычагом 140а, 140b второй пары. Центральный ролик 46' и два наружных ролика 48а', 48b' используются для контакта с четырьмя подъемными стропами 20а', 20b', 20с' и 20d' для укрытия груза 26 брезентом 22 или снятия брезента 22 с груза 26 при эксплуатации системы 120.
При работе каждый из направляющих поворотных рычагов 138а, 138b, 140а и 140b поворачивается наружу относительно узла трубчатой рамы 122. Далее соответственные подъемные стропы 20а', 20d' контактируют с направляющими катушками для стропов 144а, 144b, и соответственные подъемные стропы 20с', 20b' контактируют с направляющими катушками для стропов 146а, 146b. Каждый из соответственных подъемных стропов 20а', 20d' проходит по соответственному наружному ролику 48а', 48b', и соответственный подъемный строп 20с', 20b' проходит по центральному ролику, и четыре подъемных стропа крепят крюками к брезенту 22. Используя лебедку 24', брезент поднимают, удерживая приблизительно 1/3 брезента 22 в горизонтальной плоскости, чтобы минимизировать требования к подъему грузов, и затем, пока передвижную систему для укладки брезента 120 отводят от верха груза, брезент укладывается на груз. В заключение крюки на краях брезента крепят к боковым сторонам безбортового кузова.
Как будет понятно специалистам в данной области техники, возможны разные модификации варианта осуществления передвижной системы укладки брезента 10, описанного выше. Например, форма узла трубчатой рамы 14 или телескопической рамы 16 не ограничена показанной в этом варианте осуществления, и возможно другое расположение деталей и/или узлов при формировании узла трубчатой рамы или телескопической рамы, но в соответствии с требованиями к прочности, заложенными в порядок использования настоящего изобретения. В частности, устройство для крепления передвижной системы укладки брезента 10 к вильчатому погрузчику не ограничено конструкцией из установочных плит 32а, 32b, которые описаны выше, и может включать другие средства, такие как простой крюк или канал, в который вводят систему 10 для соединения с вильчатым погрузчиком. Кроме того, центральный и наружные ролики могут быть заменены другими вращающимися элементами, такими как колеса, или может быть использован только один ролик. В качестве еще одного примера, центральный и наружные ролики могут иметь несколько ребер или зубчатых колес на их окружных поверхностях, чтобы облегчить захват брезента во время работы. Также, место расположения лебедки 24 не ограничено центром узла трубчатой рамы, как показано. Вместо этого в некоторых применениях лебедка 24 может быть размещена на боковой продольной штанге, в зависимости от конфигурации. Далее, устройство силовой передачи не ограничено гидросистемой и, например, также можно использовать электрическое или пневматическое устройство силовой передачи, чтобы управляемо соединить его с телескопической рамой, особенно когда такая система может быть удобно запитана от вильчатого погрузчика, используемого для конкретного применения. В заключение, как сказано выше, передвижную систему укладки брезента 10 устанавливают на подвижное грузоподъемное транспортное средство, такое как вильчатый погрузчик 12, но передвижная система укладки брезента 10 также может быть смонтирована на стационарном посту для эксплуатации.
Хотя описанное выше в настоящем документе считается предпочтительными примерами вариантов осуществления настоящего изобретения, модификации изобретения должны быть очевидны специалистам в данной области техники из вышеприведенного описания, и поэтому желательно, чтобы на основании прилагаемой формулы изобретения все такие модификации подпадали под истинную сущность и объем изобретения. Соответственно, то, что желательно закрепить патентом США, является изобретение, определенное в приведенных ниже пунктах формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕЙЕР ПЛАСТИНЧАТЫЙ ПЕРЕДВИЖНОЙ С ИЗМЕНЯЕМОЙ ВЫСОТОЙ ПОДЪЕМА | 2004 |
|
RU2274594C1 |
| ОПОРЫ ДАТЧИКОВ ПОЛОЖЕНИЯ ДЛЯ СИСТЕМЫ ДИАГНОСТИКИ КЛАПАНОВ УПРАВЛЕНИЯ ПОТОКОМ | 2016 |
|
RU2737182C2 |
| Устройство для укладски штучных грузов | 1971 |
|
SU358920A1 |
| Устройство для обжатия материалов | 1989 |
|
SU1722870A1 |
| СИСТЕМА УЗЛОВЯЗАТЕЛЯ ШПАГАТА ДЛЯ ВЯЗАНИЯ УЗЛОВ ШПАГАТА И УСТРОЙСТВО ПРЕССОВАНИЯ ТЮКОВ | 2019 |
|
RU2758012C1 |
| Погрузчик | 1977 |
|
SU667495A1 |
| ПОДЪЕМНЫЙ КРАН С ПЕРЕМЕЩАЕМЫМ ПРОТИВОВЕСОМ | 2010 |
|
RU2556678C2 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| КРАН | 2010 |
|
RU2532201C2 |
| УСТАНОВКА НАМОТКИ-ВЫМОТКИ И ОБОГРЕВА КАБЕЛЯ ПОГРУЖНЫХ ЭЛЕКТРОНАСОСОВ | 1999 |
|
RU2172870C2 |














Система включает узел трубчатой рамы с подвижно закрепленной в ней телескопической рамой. Телескопическая рама способна выдвигаться и/или втягиваться в узле трубчатой рамы. Телескопическая рама включает несколько роликов, способных вращаться, когда они контактируют с несколькими гибкими элементами и гибким покрытием. Устройство силовой передачи установлено на узел трубчатой рамы для обеспечения втягивания и/или выдвижения телескопической рамы в узле трубчатой рамы. Лебедка приспособлена для соединения с узлом трубчатой рамы и имеет несколько стропов, соединенных с брезентом для закрывания и/или раскрывания груза. Систему монтируют на вильчатый погрузчик для закрывания груза брезентом и/или снятия брезента с груза. Изобретения обеспечивают повшение удобства укладки покрытия на груз. 4 н. и 34 з.п. ф-лы, 20 ил.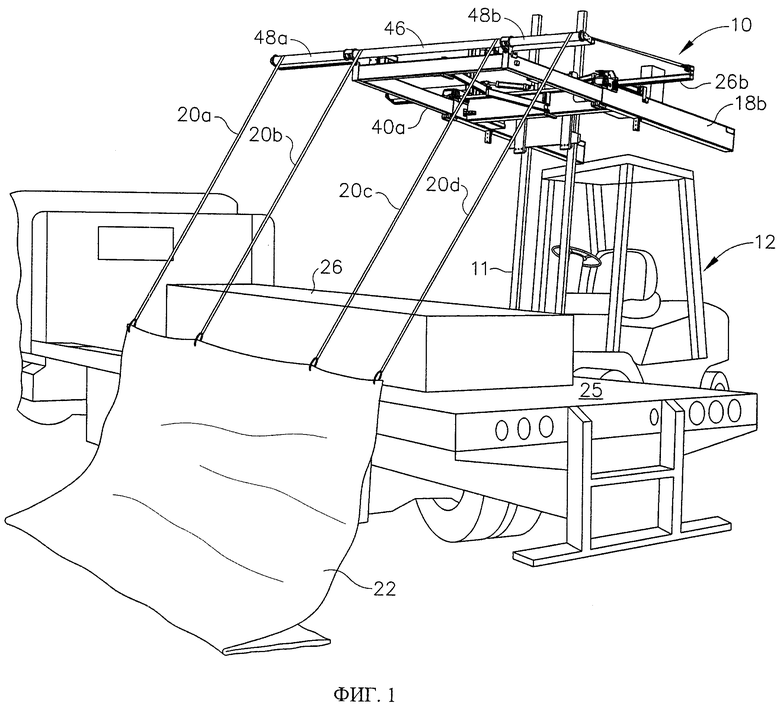
1. Система, монтируемая на подвижное грузоподъемное транспортное средство, для укладки гибкого покрытия на груз и/или снятия гибкого покрытия с груза, причем система включает:
узел трубчатой рамы с подвижно прикрепленной к нему телескопической рамой и с переменной площадью основания, причем телескопическая рама способна выдвигаться и/или втягиваться в узле трубчатой рамы и причем узел трубчатой рамы включает первую пару направляющих поворотных рычагов, каждый из которых шарнирно связан с противоположными сторонами узла трубчатой рамы, чтобы изменять площадь основания узла трубчатой рамы, когда каждый из направляющих поворотных рычагов поворачивается наружу; и
лебедку, приспособленную для соединения с узлом трубчатой рамы, причем лебедка имеет несколько гибких элементов, соединенных с гибким покрытием, чтобы закрывать или раскрывать груз.
2. Система по п. 1, отличающаяся тем, что телескопическая рама включает несколько роликов, выполненных так, чтобы быть способными вращаться при контакте с несколькими гибкими элементами и гибким покрытием.
3. Система по п. 2, отличающаяся тем, что несколько роликов определены как два одинаковых наружных ролика и центральный ролик, причем каждый из роликов соединен с телескопической рамой.
4. Система по п. 1, отличающаяся тем, что каждый из направляющих поворотных рычагов соединен с несколькими гибкими элементами.
5. Система по п. 1, отличающаяся тем, что телескопическая рама включает вторую пару направляющих поворотных рычагов, каждый из которых шарнирно соединен с противоположной стороной узла трубчатой рамы, причем каждый из направляющих поворотных рычагов соединен с несколькими гибкими элементами.
6. Система по п. 5, отличающаяся тем, что каждый из второй пары направляющих поворотных рычагов соединен с соответственным гидроцилиндром, который вызывает поворачивание направляющих поворотных рычагов относительно узла трубчатой рамы и/или телескопической рамы.
7. Система по п. 1, отличающаяся тем, что лебедка включает автономное беспроводное дистанционное управление, которое позволяет пользователю эксплуатировать лебедку.
8. Система по п. 1, отличающаяся тем, что лебедка работает электронно от подвижного грузоподъемного транспортного средства.
9. Система по п. 1, отличающаяся тем, что лебедка работает электронно от по меньшей мере одного электрического аккумулятора.
10. Система по п. 1, отличающаяся тем, что подвижным грузоподъемным транспортным средством является вильчатый погрузчик.
11. Система по п. 1, отличающаяся тем, что несколько гибких элементов выбирают из группы, состоящей из стропов, тросов, канатов и механических манипуляторов.
12. Система по п. 1, отличающаяся тем, что каждый из направляющих поворотных рычагов первой пары включает направляющую катушку для стропа, закрепленную на его соответственном свободном конце, чтобы контактировать с соответственным стропом.
13. Система по п. 1, отличающаяся тем, что узел трубчатой рамы включает пару монтажных плит, используемых для разъемного крепления узла трубчатой рамы к вильчатому погрузчику.
14. Система по п. 1, кроме того, включающая устройство силовой передачи, имеющее узел гидромотора, несколько цепей, поперечный вал, два промежуточных зубчатых колеса, верхнюю направляющую для кулачкового следящего элемента, нижнюю направляющую для кулачкового следящего элемента, боковую направляющую для кулачкового следящего элемента и переднюю направляющую для кулачкового следящего элемента, которые соединены между собой, чтобы обеспечивать выдвижение и/или втягивание телескопической рамы в узле трубчатой рамы при эксплуатации системы.
15. Система по п. 14, отличающаяся тем, что узел поперечного вала включает поперечный вал, три зубчатых колеса и два цилиндрических фланца, которые все соединены друг с другом.
16. Система по п. 1, отличающаяся тем, что телескопическая рама включает соответственные внутренний и наружный удлинительные рычаги, используемые для защиты линий гидравлической жидкости.
17. Система по п. 1, отличающаяся тем, что лебедка включает узел зубчатой передачи, плиту для установки зубчатых колес, четыре стержневых пальца, узел двигателя лебедки, торцевую плиту, узел барабана и четыре разделительные плиты, которые соединены между собой.
18. Система по п. 1, отличающаяся тем, что гибким покрытием является брезент.
19. Система, монтируемая на вильчатый погрузчик, для укладки брезента на груз и/или снятия брезента с груза, причем система включает:
узел трубчатой рамы с подвижно прикрепленной к нему телескопической рамой и с переменной площадью основания, причем телескопическая рама способна выдвигаться и/или втягиваться в узле трубчатой рамы и причем узел трубчатой рамы включает первую пару направляющих поворотных рычагов, каждый из которых шарнирно связан с противоположными сторонами узла трубчатой рамы, чтобы изменять площадь основания узла трубчатой рамы, когда каждый из направляющих поворотных рычагов поворачивается наружу;
устройство силовой передачи, установленное на узел трубчатой рамы, для обеспечения втягивания и/или выдвижения телескопической рамы в узле трубчатой рамы, и
лебедку, приспособленную для соединения с узлом трубчатой рамы, причем лебедка имеет несколько стропов, соединенных с брезентом, чтобы закрывать или раскрывать груз.
20. Система по п. 19, отличающаяся тем, что каждый из узла трубчатой рамы и телескопической рамы соответственно определен как две параллельных, отстоящих одна от другой на некоторое расстояние продольных трубчатых штанги, которые соединены между собой на соответственных концах поперечной штангой.
21. Система по п. 19, отличающаяся тем, что каждый из направляющих поворотных рычагов соединен с несколькими стропами.
22. Система по п. 19, отличающаяся тем, что телескопическая рама включает вторую пару направляющих поворотных рычагов, каждый из которых шарнирно соединен с противоположной стороной узла трубчатой рамы, причем каждый из направляющих поворотных рычагов соединен с несколькими стропами.
23. Система по п. 22, отличающаяся тем, что каждый из направляющих поворотных рычагов второй пары включает направляющую катушку для стропа, закрепленную на его соответственном свободном конце, чтобы контактировать с соответственным стропом.
24. Система по п. 22, отличающаяся тем, что каждый из второй пары направляющих поворотных рычагов включает соответственную пару гидроцилиндров, которые обеспечивают поворачивание направляющих поворотных рычагов относительно узла трубчатой рамы и/или телескопической рамы.
25. Система по п. 20, отличающаяся тем, что телескопическая рама включает один центральный ролик и два одинаковых наружных ролика, причем центральный ролик прикреплен к поперечной штанге, и каждый из соответственных наружных роликов прикреплен к соответственной второй паре направляющих поворотных рычагов.
26. Система по п. 19, отличающаяся тем, что лебедка включает узел зубчатой передачи, плиту для установки зубчатых колес, четыре стержневых пальца, узел двигателя лебедки, торцевую плиту, узел барабана и четыре разделительные плиты, которые соединены между собой.
27. Система по п. 19, отличающаяся тем, что несколько стропов определены как четыре одинаковых стропа, которые соединены с возможностью вращения с лебедкой таким образом, что два стропа идут в одном направлении, и два других стропа идут в противоположном направлении при эксплуатации системы.
28. Система по п. 26, отличающаяся тем, что четыре разделительные плиты соединены с узлом барабана отдельно друг от друга и параллельно, и каждый из стропов распложен между четырьмя разделительными плитами.
29. Система по п. 22, отличающаяся тем, что каждый из первой пары направляющих поворотных рычагов и каждый из второй пары направляющих поворотных рычагов выполнены способными поворачиваться независимо друг от друга.
30. Система, монтируемая на вильчатый погрузчик для укладки брезента на груз и/или снятия брезента с груза, причем система включает:
узел трубчатой рамы с закрепленной в нем рамой в форме поддона и с переменной площадью основания; и
несколько направляющих поворотных рычагов, каждый из которых шарнирно соединен с узлом трубчатой рамы и отходит наружу от угла узла трубчатой рамы, причем каждый из этих нескольких направляющих поворотных рычагов способен выдвигаться и/или втягиваться в узле трубчатой рамы, чтобы изменить площадь основания узла трубчатой рамы, и
лебедку, приспособленную для соединения с узлом трубчатой рамы, причем лебедка имеет несколько стропов, соединенных с брезентом для закрывания и/или раскрывания груза.
31. Система по п. 30, отличающаяся тем, что узел трубчатой рамы представляет собой четыре отстоящие одна от одной трубчатые штанги, которые соединены между собой на соответственных концах, чтобы сформировать трубчатую раму по существу квадратной формы.
32. Система по п. 30, отличающаяся тем, что узел трубчатой рамы включает два одинаковых наружных ролика и центральный ролик, причем каждый из двух наружных роликов соединен с соответственными двумя из направляющих поворотных рычагов, и центральный ролик соединен с одной из четырех трубчатых штанг.
33. Система по п. 30, отличающаяся тем, что несколько стропов определены как четыре одинаковых стропа, которые соединены с возможностью вращения с лебедкой таким образом, что два из стропов идут в одном направлении и два других стропа идут в противоположном направлении при эксплуатации системы.
34. Способ закрывания груза, помещенного на безбортовый кузов грузовика, брезентом с помощью вильчатого погрузчика, причем данный способ включает:
установку системы на вильчатый погрузчик для укладки брезента на груз, причем система включает узел трубчатой рамы с прикрепленной к нему телескопической рамой и с переменной площадью основания, причем телескопическая рама выполнена способной выдвигаться и/или втягиваться в узле трубчатой рамы, и причем узел трубчатой рамы включает первую пару направляющих поворотных рычагов, каждый из которых шарнирно связан с противоположными сторонами узла трубчатой рамы, чтобы изменять площадь основания узла трубчатой рамы, когда каждый из направляющих поворотных рычагов поворачивается наружу, лебедка приспособлена для соединения с узлом трубчатой рамы, причем лебедка имеет несколько гибких элементов, соединяемых с гибким покрытием для того, чтобы закрывать и/или раскрывать груз;
прикрепление нескольких гибких элементов к брезенту и
подъем брезента путем управления системой и размещение брезента поверх груза.
35. Способ по п. 34, отличающийся тем, что этап установки системы включает выдвижение наружу телескопической рамы из узла трубчатой рамы так, чтобы несколько гибких элементов переместили брезент и разместили его поверх груза.
36. Способ по п. 34, отличающийся тем, что несколькими гибкими элементами являются четыре одинаковых стропа, которые соединены с возможностью вращения с лебедкой таким образом, что два стропа идут в одном направлении, и два других стропа идут в противоположном направлении при эксплуатации системы.
37. Способ по п. 34, отличающийся тем, что каждый из направляющих поворотных рычагов соединен с четырьмя одинаковыми стропами.
38. Способ по п. 34, отличающийся тем, что телескопическая рама включает вторую пару направляющих поворотных рычагов, каждый из которых шарнирно соединен с противоположной стороной узла трубчатой рамы, и отличающийся тем, что каждый из направляющих поворотных рычагов соединен с четырьмя одинаковыми стропами.
| US 2006163904 A1, 27 | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| US 2003026681 A1, 06.02.2003 | |||
| US 5964236 A, 12.10.1999 | |||
| УСТРОЙСТВО ДЛЯ ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ ТЕНТОВ, ПРИМЕНЯЕМЫХ ДЛЯ ЗАКРЫТИЯ КУЗОВОВ ПРОМЫШЛЕННЫХ, СЕЛЬСКОХОЗЯЙСТВЕННЫХ И АНАЛОГИЧНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2415763C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СОЗРЕВАНИЯ СВЕЖИХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПРОДУКТОВ (ВАРИАНТЫ) | 1993 |
|
RU2104635C1 |

