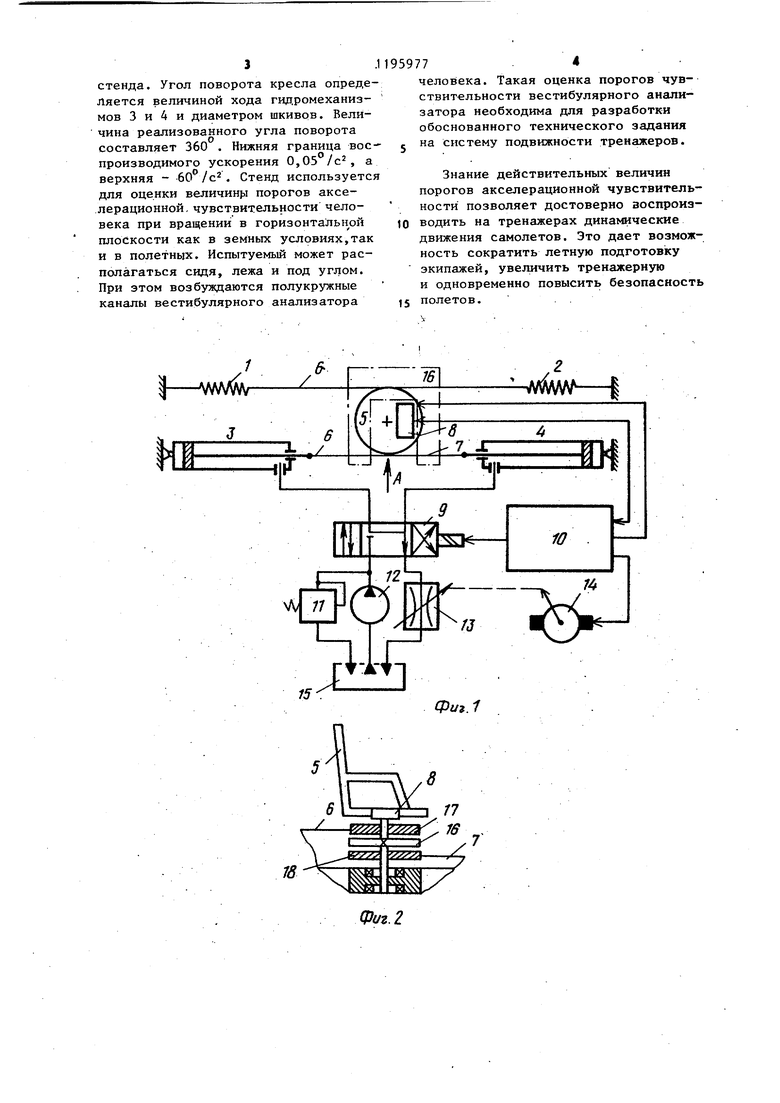
1 Изобретений относится к устройст вам для проведения исследований по определению порогов акселерационной чувствительности вестибулярного аппарата человека. Цель изобретения - повышение точ ности проведения исследования путем - определения порогов акселерационной чувствительности. На фиг. 1 представлена принципиальная электрогидравлическая схема устройства; на фиг. 2 - схема механизма реверса вращения; на фиг. 3 принципиальная схема блока дистанционного управления. I Устройство (фиг. 1) содержит упругие элементы 1 и 2, гидромеханизмы 3 и 4, раскладное кресло 5, гибкие связи 6 и 7, датчик 8 угловогоускорения, распределитель 9, блок 10 дистанционного управления, предохранительный клапан 11, гидронасос 12, дроссель 13, электродвигатель 14j жидкостный бак 15, механиз реверса вращения. Схема механизма реверса вращения (фиг. 2) содержит электромагнит ную муфту 16, соединенную неподвижно с осью вращения кресла 5, первьй шкив 17, сидящий свободно на оси вращения кресла 5 над электромагнит ной муфтой 16, второй шкив 18, расп ложенньй под электромагнитной муфтой 16. Схема блока 10 дистанционного управления (фиг. 3) содержит усилитель 19, мультивибратор 20, блок 21 управления, переключатель 22 и зада чик 23 ускорения. Устройство (фиг. 1) работает сле дующим образом. Гидронасос 12 создает давление в гидросистеме при положении распреде лителя 9 на Нагнетание и подключени гидромеханизма 3, который через гиб кую связь 6 растягивает упругий эле мент 1. После перемещения гидромеханизма 3 до упора распределитель переключается на гидромеханизм 4, который через гибкую связь 7 растягивает упругий элемент 2. По оконча нии движения гидромеханизма 4 распределитель 9 переключается на слив через регулируемьй дроссель 13, который находится в запертом положении. Команда управления с блока 10 дистанционного управления подключает электромагнитную муфту 16 к шки77ву 17, т.е. устанавливает направление движения по часовой стрелке (против часовой). Управляя расходом жидкости на дросселе 13, можно воспроизводить заданный блоком 10 дистанционного управления закон изменения ускорения движения кресла 5 с испытуемым оператором. Обратная связь по ускорению от датчика 8 корректирует степень открытия дросселя 13. После окончания вращения в одну сторону схема переключается на движение в другую сторону, при этом дроссель 13 закрывается, распределитель 9 переключается на другой гидромеханизм и электромагнитная муфта 16 переключается на противоположньй шкив, обеспечивая вращение в противоположную сторону. Предохранительный клапан 11 служит для сбрасывания избыточного давления в гидросистеме. Блок 10 дистанционного управления (фиг. 2) задает требуемую) величину углового ускорения R с помощью задатчика 8 ускорения, сравнивает ее на усилителе 19с величиной сигнала от датчика 8 углового ускорения и, в зависимости от величины рассогласования, управляет скважностью импульсного напряжения на выходе мультивибратора 20 с помощью блока 21 управления, выход которого связан с цепью питания электродвигателя 14, изменяет его скорость вращения, а следова-тельно, величину дросселирования жидкости. Переключатель 22 управляет распределителем, и электромагнитной муфтой 16. Упругие элементы 1 и 2 имеют первоначальное натяжение, необходимое для того, чтобы они .работали в линейной части своей характеристики и для выборки всех люфтов подвижной системы (места крепления упругого элемента и гидромеханизма, и места крепления гибкой связи), а также возможного удлинения во времени гибких связей 6 и .7. При этом необходимо, чтобы относительное удлинение упругого элемента 1(2) при его растяжении гидромеханизмом 3 (4) составляло не более 10-12% его величины в нерастянутом состоянии. Ускорение движения кресла является входным сигналом для вестибулярного анализатора человека, поэтому необходимо охватить обратной связью по ускорению всю си.стему автоматического управления
3.
стенда. Угол поворота кресла определяется величиной хода гидромеханизмов 3 и 4 и диаметром шкивов. Величина реализованного угла поворота составляет 360 . Нижняя граница вос производимого ускорения О,05°/с, а верхняя - -60 /с. Стенд используется для оценки величин{11 порогов аксе.лерационной, чувствительности человека при вращений в горизонтальн ой плоскости как в земных условиях,так и в полетных. Испытуемый может располагаться сидя, лежа и под углом. При этом возбуждаются полукружные каналы вестибулярного анализатора
59774
человека. Такая оценка порогов чувствительности вестибулярного анализатора необходима для разработки обоснованного технического задания , на систему подвижности тренажеров.
Знание действительных величин порогов акселерационной чувствительности позволяет достоверно воспроизводить на тренажерах динамические движения самолетов. Это дает возможность сократить летную подготовку экипажей, увеличить тренажерную и одновременно повысить безопасность
J5 полетов. . .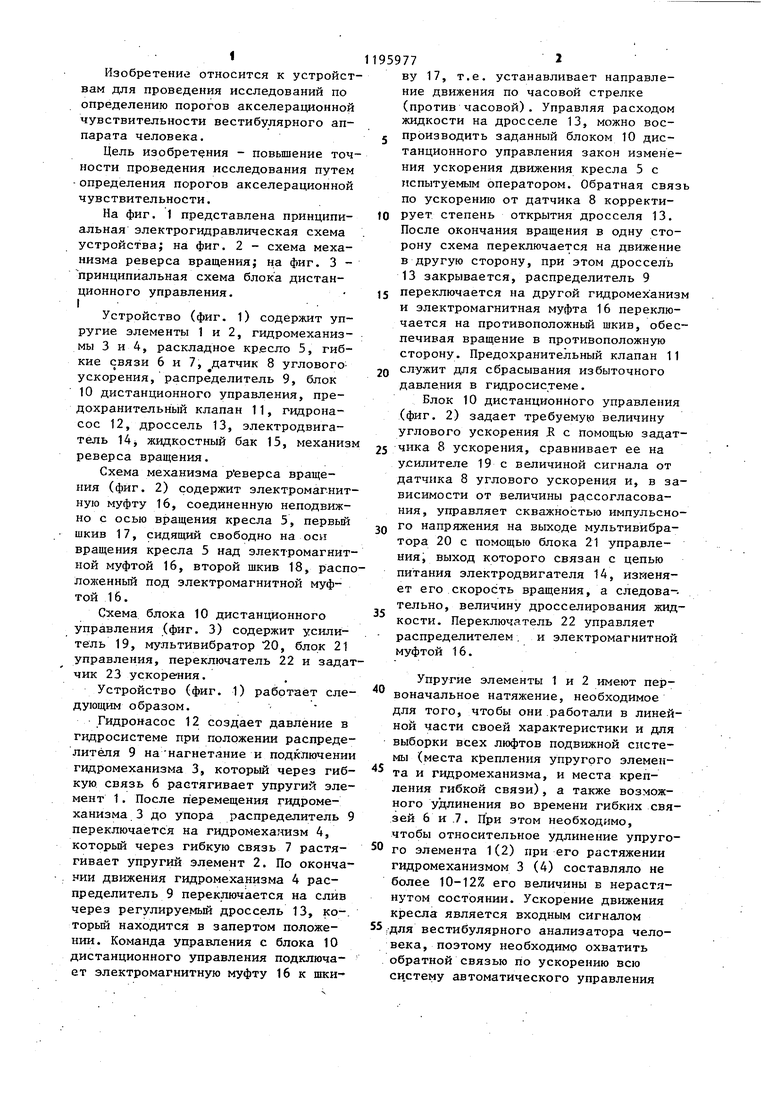
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для определения порогов акселерационной чувствительности | 1983 |
|
SU1195976A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ПОРОГОВ АКСЕЛЕРАЦИОННОЙ | 1972 |
|
SU328913A1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ РАЗВИТИЯ КООРДИНАЦИИ ДВИЖЕНИЙ И ВЕСТИБУЛЯРНОЙ УСТОЙЧИВОСТИ В СЛОЖНО-КООРДИНАЦИОННЫХ ВИДАХ СПОРТА И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2015 |
|
RU2595595C1 |
| Гидроприводной возвратно-поступательный насос | 1982 |
|
SU1084484A1 |
| ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНЫХ НАВЫКОВ СПОРТСМЕНА | 2017 |
|
RU2657994C1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
| Трансмиссия механическая с гидравлическими дифференциальными связями ведущих колес и многорежимной системой электронного управления их блокировкой для автотранспортного средства повышенной проходимости | 2018 |
|
RU2692737C1 |
| Система управления колесами транспортного средства | 1990 |
|
SU1787858A1 |
| ТЯГОВОЕ ОБОРУДОВАНИЕ БРОНИРОВАННОЙ РЕМОНТНО-ЭВАКУАЦИОННОЙ МАШИНЫ И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ЛЕБЕДКИ ТЯГОВОГО ОБОРУДОВАНИЯ | 2009 |
|
RU2408525C1 |
| Система приводов трактора | 1983 |
|
SU1131686A1 |
УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ . ИССЛЕДОВАНИЙ ВЕСТИБУЛЯРНОГО АППАРАТА, содержащее раскладное кресло с .головодержателем, силовой привод с блоком дистанционного управлениги, о т личйющееся .тем, что, с целью повьщения точности- проведения исследований путем определения порогов акселерационной чувствительности, силовой привод выполнен в виде первого упругого элемента, соединенного с одной стороны первой гибкой связью через механизм реверса вращения с первым г,идромеханизмом, с другой стороны первый упругий элемент крепится неподвижно, второго упругого элемента, соединенного с одной стороны второй гибкой связью в обратном направлении через тот 5ке механизм реверса вращения с вторым гидромеханизмом, с другой стороны второй упругий элемент крепится неподвижно, причем механизм реверса вращения состоит из электромагнитной муфты, соединенной неподвижно с осью вращения кресла, первого шкива, сидящего свободно на оси вращения кресла над электромагнитной муфтой и соединенного с первой гибкой связью, второго шкива, сидящего свободно на оси вращения кресла под электромагнитной муфтой и соединенного с второй гибкой связью, при этом управляющий вход электромагнитной ,муфты соединен с первым выходом блока дистанционного управления, вход S которого связан с установленным на . (Л кресле датчикомуглового ускорения, а второй выход блока дистанц1|онного управления подключен к первому каналу распределителя, связанному с одной стороны с вторым, гидромеханизмом, а с другой стороны через дроссель подсоединенному к первому ;о входу жидкостного бака, второй канал СП распределителя связан с одной стороi;p ны с гидромеханизмом, а с другой стороны через предохранительньй клапан и параллельно через гидронасос подключен к второму и третьему входам жидкостного бака соответственно.
/6 - AлMMг
18Фиг.1
8
П
Фиг. 2 - УШЛА1
