1
Изобретение относится к горной промьшшенности.и может быть использовано в устройствах ударного действия для образования скважин в грунте.
Цель изобретения - повьшение скорости извлечения устройства из скважины .
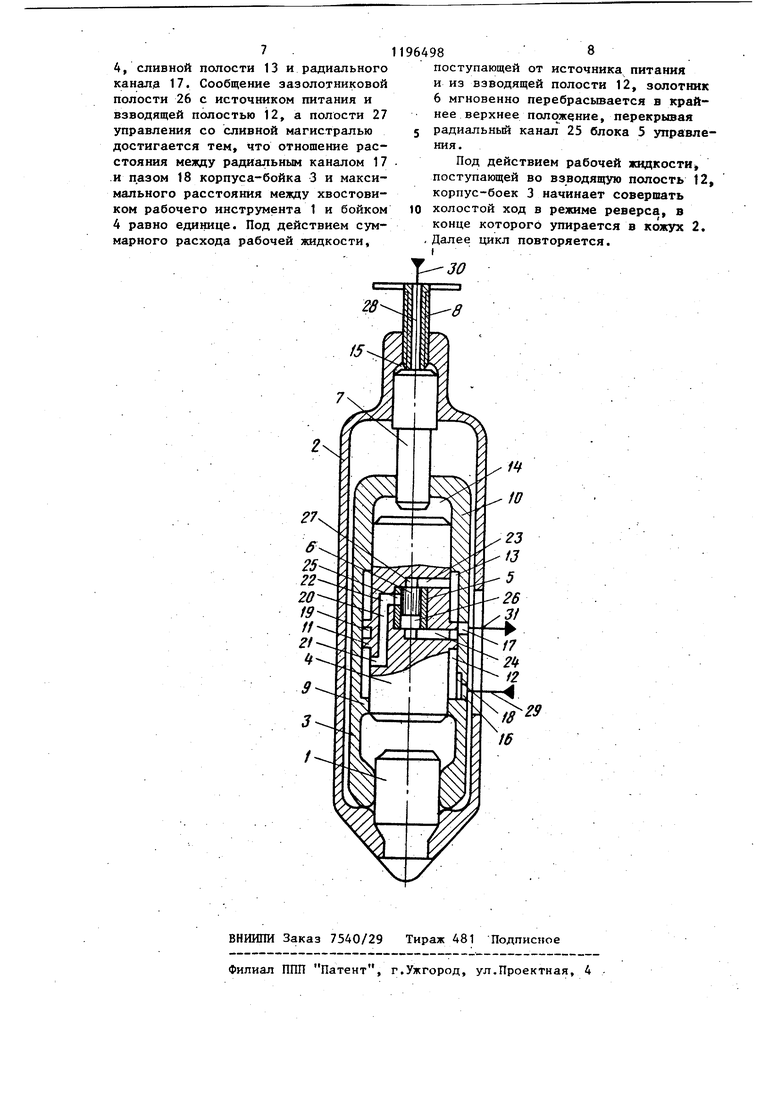
На чертеже представлено предлагаемое устройство.
Реверсивное гидропневматическое ударное устройство состоит из рабочего инструмента 1, жестко связанного с кожухом 2. В кожух 2 установлен коаксиально бойку корпус-боек 3.
Корпус-боек 3 установлен в кожухе 2 коаксиально бойку 4. В бойке 4 размещен блок 5 управления с золотником 6.
В кожухе 2 соосно бойку установлен шток 7 с буртиком и фиксатором его положения, выполненным как вариант в виде винта 8, установленного в кожухе с возможностью взаимодействия со штоком 7.
Корпус-боек 3, выполненный со ступенями 9 и 10, и боек с пояском 11 образуют взводящую 12 и сливную 13 полости. Подвижный корпус 3, боек 4 и шток 7 образуют пневмоаккумуляторную полость 14. Кожух 2, шток 7 и винт 8 образуют реверсивную полость .15. В корпусе-бойке 3 вьшолнены радиальные каналы 16 и 17 и паз 18. В бойке 4 выполнены кольцевая проточка 19, аксиальный канал 20 и радиальные каналы 21, 22, 23 и 24. В блоке 5 управления .выполнен радиальный канал 25. Боек 4, блок 5 управления и золотник 6 образуют зазолотниковую полость 26 и полость 27 управления. В винте 8 вьшолнен аксиальный канал 28. Рабочая жидкость от гидропривода к реверсивному гидропневматическому ударному устройству подается по гидропроводам 29 и 30, а .отводится по гидропроводу 31.
Как вариант, фиксацию положения штока осуществляет полость 15, связанная с источником питания (не показан) .
Отношение минимального расстояния между корпусом-бойком 3 и буртиком штока 7 к сумме минимального расстояния между штоком 7 и бойком 4 и максимального расстояния между хвостовиком рабочего инструмента 1 .и бойком
964981
4 для работы устройства в режиме , бурения вьшолнено равным единице.
Реверсивное гидропневматическое ударное устройство в нормальном режиме работает следующим образом.
Пиевмоаккумуляторная полость 14 заполняется газом. Под действием давления газа боек 4 находится в крайнем нижнем (по чертежу) положе10 НИИ и упирается в хвостовик рабочего инструмента 1. Корпус-боек 3 находится в крайнем верхнем (по чертежу) положении и упирается в боек 4, шток 7 находится в крайнем верхнем
15 положении н упирается в винт 8. Золотник 6 находится в крайнем нижнем положении.
Рабочая жидкость, поступающая одновременно от источника питания по
20 гидррпроводу 29, радиальному каналу 16 и пазу 18 подвижного корпуса 3, кольцевой проточке 19 и радиальному каналу 24 бойка 4, в зазолотниковую полость.26, воздействует На золотник 25 перемещая его в крайнее верхнее положение и во взводящую полость 12 по гидропроводу 29, радиальному каналу 16 и пазу 18 подвижного корпуса 3, воздействует на площадь кольцевой ступени 9 корпуса-бойка 3 и на площадь пояска 11 бойка 4, перемещая корпус-боек 3 в крайнее нижнее положение до упора с кожухом 2 (рабочий ход подвижного корпуса), а затем боек 4 в верхнее положение (холостой
ход бойка). Такое последовательное движение масс обусловлено разными по величине силами, действующими со стороны пневмраккумулятора 14 на корпус-боек 3 и боек 3, при равенстве усилий, действующих на них со стороны взводящей 12 и сливной 13 полостей.
При совершении поршнем-бойком 3 рабочего хода а бойком 4 холостого хода газ в пневмоаккумуляторе 14 снижается. В конце холостого хода бойка 4 поясок 11 бойка 4 перекрывает радиальный канал 17 корпуса-бой:ка 5, а зазолотниковая полость 26
соединяется со сливной магистралью радиальным каналом 24, кольцевой проточкой 19 бойка 4 и радиальным каналом 17 корпуса-бойка 3. Далее рабочая жидкость из сливной полости
55 13 вытесняется бойком 4 в полость .27 управления через радиальный канал 23 бойка 4, воздействует на золотник 6, перемещая его вниз. При этом рабочая 3 жидкость из зазолотниковой полости 26 выталкивается в сливную магистраль через радиальный канал 24, кол цевую проточку 19 бойка 4 и радиаль ньй канал 17. При перемещении золот ника 6 приоткрывается радиальный канал 25 блока 5 управления и рабочая жидкость от источника питания через радиальный, канал 16, паз 18 корпуса-бойка 3, взводящую полость 12, радиальный канал 21, аксиальный канал 20, радиальньй канал 22 бойка 4 и радиальньй канал 25 блока 5 управления поступает в полость 27 управления и с большой скоростью перемещает золотник 6 в крайнее нижне положение, сообщая тем самым взводя щую 12 и сливную 13 полости по ради альному каналу 21, аксиальному,кана 20, радиальному каналу 2.2 бойка 4, радиальному каналу 25 блока 5 управ ления, полости 27 управления и ради альному каналу 23 бойка 4. Давление жидкости в взводящей 12 и сливной 13 полостях выравнивается Под действием сжатого газа пневмоаккумулятора 14 боек 4 и корпус-бое 3начинают ускоренно перемещаться в противоположные стороны. В конце рабочего хода боек 4 наносит удар п хвостовику рабочего инструмента 1, при этом радиальньй канал 21 бойка 4перекрывается ступенью 9 корпусабойка 3, разобщая полость 12 взвода и источник питания со сливной полос тью 13, а зазолотниковая полость 2-6 соединяется с источником питания и взводящей полостью 12 через радиаль ньй канал 24, кольцевую проточку 19 бойка 4 и паз 18, радиальньй канал 16 корцуса-бойка 3. Полость 27 управления при этом сообщена со сливной магистралью посредством радиаль ного канала 23 бойка 4, сливной полости 13 и радиального канала 17 подвижного корпуса 3. Сообщение зазолотниковой полости 26 с источ НИКОМ питания и взводящей полостью 12, а полости 27 управления со слив ной магистралью достигается тем,что отношение расстояния между радиальным каналом 17 и пазом 18 корпусабойка 3 и максимального расстояния между хвостовиком рабочего инструмента 1 и бойком 4 равно единице. Под действием суммарного расхода рабочей жидкости, поступающей от источника питания и из взводящей полости 12, золотник 6 мгновенно 98 перебрасывается в крайнее верхнее положение, перекрывая радиальный канал 25 блока 5 управления. Под действием рабочей жидкости, поступающей во Взводящую полость 12, корпус-боек 3 останавливается (заканчивается холостой ход) и начинает совершать рабочий ход, в конце которого упирается в кожух 2, Далее цикл повторяется. . Реверсирование гидропневматического ударного устройства осуществляется за счет выдвижения штока 7, которьй прижимает боек 4 к хвостовику рабочего инструмента 1. Вьщвижение штока 7 может происходить двумя способами: 1)за счет подаваемой рабочей жидкости от источника питания по гидропроводу 30 и аксиальному каналу 28 винта 8 в реверсивную полость 15, которая воздействует на шток 7, перемещая его в нижнее положение, при этом шток 7 прижимает боек 4 к хвостовику рабочего инструмента1 и удерживает его в процессе дальнейшей работы, а рабочая жидкость в реверсивной полости 15, .аксиальном канале 28 винта 8 и гидропроводе 30 запирается распределительным устройством гидропривода (при образовании скважин в грунте самим гидропневматическим ударным устройством); 2)за счет завинчивания винта 8, которьй перемещает шток 7 в .нижнее положение, при этом шток 7 прижимает боек 4 к хвостовику рабочего инструмента (при образовании скважин в грунте дополнительным рабочим органом, а гидропневматическое ударное устройство при этом не внедряется в грунт). Реверсивное гидропневматическое ударное устройство в режиме реверса работает следующим образом. Перед включением в работу гидро-. пневматического ударного устройства шток 7 находится в крайнем нижнем положении за счет воздействующей на него подаваемой от гидропривода рабочей жидкости в реверсивную полость 15 по гидропроводу 30 и аксиальноь1у каналу 28 винта 8 или за счет завинчиваемого винта 8, боек 4 прижат к хвостовику рабочего инструмента 1 штоком 7. Корпус-боек 3 под действием давления газа пневмоаккумуляторной полости 14 находится в крайнем верхнем положении и упирается верхним торцом в буртик штока 7. Соприкосновение верхнего торца подвижного корпуса-бойка 3 и буртика штока 7 достигдется тем, что отношение минимального расстояния между корпусомбойком 3 и буртиком штока 7 и суммой минимального расстояния между штоком .7 и бойком 4 и максимального расстЪя ния между хвостовиком рабочего инструмента 1 и бойком 4 (при работе реверсивного гидропневматического ударного устройства в нормальном режиме) равно единице. Золотник 6 нахо дится в крайнем нижнем положении. Рабочая жидкость в реверсивной полос ти 15, аксиальном канале 28 винта 8 и гидропроводе 30 запирается распределительным устройством гидропривода Рабочая жидкость, поступающая одновременно от источника питания в за золот.никовую полость 26 по гидропроводу 29, радиальному каналу 16 и паз 18 корпуса-бойка 3, кольцевой проточ ке 19 и радиальному каналу 24 бойка 4, воздействует на золотник 6, -перемещая его в крайнее верхнее положение и во взводящую полость 12 по гид ропроводу 29, радиальномуканалу 16 и пазу 18 корпуса-бойка 3, воздействует на площадь кольцевой ступени 9 подвижного корпуса 3, перемещая корпус-боек 3 в нижнее положение (холос той ход подвижного корпуса в режиме реверса). Боек 4 возвратно-поступательное движение в режиме реверса не совершает, так как прижат к хвостовику рабочего инструмента 1 штоком 7. .При совершении корпусом-бойком 3 холостого хода в режиме реверса газ в пневмоаккумуляторе 14 сжимается. В конце холостого хода корпуса-бойка 3 его радиальный канал .17 перекрывается пояском 11 бойка 4, а зазолотциковая полость 26 соединяется со сливной магистралью радиальньм каналом 24, кольцевой проточкой 19 бойка 4 и радиальным каналом 17. Далее рабочая жидкость из сливной полости 13 вытесняется корпусом-бойком 3 в полость 27 управления через радиальный канал 23 бойка 4, воздействуя на золотник 6, перемещая его вниз. , При этом рабочая жидкость из зазолотниковой полости 26 выталкивается в сливную магистраль через радиальный канал 24, кольцевую проточку 1.9 бойка 4 и радиальный канал 17 корпуса-бойка 3. При перемещении золотника 6 приоткрывается радиальный канал . 25 блока 5 управления и рабочая жид- ; кость от источника питания через радиальньй канал 16, паз- 18, взводящую полость 12, радиальный канал 21, аксиальный канал 20, радиальный канал 22 бойка 4 и радиальный канал 25 блока 5 управления поступает в полость 27 управления и с большой скоростью перемещае.т золотник 6 в крайнее нижнее положение, сообщая тем самым взводящую 12 и сливную 13 полости по радиальному каналу 21, аксиальному каналу 20, радиальному каналу 22 бойка 4, радиальному каналу 25 блока 5 управления, полости 27 управления и радиальному каналу 23 бойка 4. В конце холостого хода корпус-боек 3 упирается в кожух 2. Давление жидкости в взводящей 12 и сливной t3 полостях выравнивается. Под действием сжатого газа пневмоаккумулятора 14 корпус-боек 3 начинает ускоренно перемещаться в верхнее положение, рабочий ход подвижного корпуса в режиме реверса. В конце рабочего хода корпус-боек 3 верхним торцом наносит удар по буртику штока 7, который передает ударный импульс на кожух 2 через рабочую жидкость, запертую в реверсивной полости 15 или. через винт 8. Нанесение удара корпусом-бойком 3 по буртику штока 7 в конце рабочего хода достигается тем, что отношение минимального расстояния между корпусом-бойком 3 и буртиком штока 7 и суммой минимального расстояния между штоком 7 и бойком 4 и максимального расстояния между х.востовиком рабочего инструмента 1 и бойком 4 (при работе реверсивного гидропневматического ударного устройства в нормальном режиме) равно единице. Во время удара корпусом-бойком 3 по буртику штока 7 радиальный канал 21 бойка 4 перекрывается ступенью 9 корпуса-бойка 3, разобщая полость 12 взвода и источник питания со сливной полостью 13, а зазолотниковая полость 26 соединяется с источником питания и взводящей полостью 12 через радиальный канал 24, кольцевую про-точку 19 бойка 4 и паз 18, радиальный канал 16 корпуса-бойка 3. Полость 27 управления при этом сообщена со сливной магистралью посредством радиального канала 23 бойка
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропневматическое ударное устройство | 1977 |
|
SU1044058A1 |
| Гидропневматическое ударное устройство | 1982 |
|
SU1078051A2 |
| Устройство для скалывания льда | 1984 |
|
SU1221277A2 |
| Гидропневматическое ударное устройство | 1979 |
|
SU846672A1 |
| Гидропневматическое ударное устройство | 1982 |
|
SU1102935A1 |
| Гидропневматическое ударное устройство | 1981 |
|
SU968374A1 |
| Гидропневмоударный грунтоуплотнитель | 1983 |
|
SU1093800A1 |
| Устройство для разрушения мерзлых грунтов | 1981 |
|
SU981523A1 |
| Гидравлический механизм ударного действия | 1983 |
|
SU1133387A1 |
| Гидропневматическое ударное устройство | 1987 |
|
SU1574715A1 |
1.. РЕВЕРСИВНОЕ ГИДРОПНЕВМАТИЧЕСКОЕ УДАРНОЕ УСТРОЙСТВО, включающее кожух с установленным в нем аксиально-подвижным бойком,золотник, полости взвода, слива и пневмоакку.мулятора, рабочий инструмент, о т л и ч а ю щ е е с я тем, что, с целью повышения скорости извлечения устройства из скважины, устройство снабжено установленным в кожухе коаксиально бойку корпусом-бойком для . Ш Г:.-- t образования с бойком полос тей взвода, слива и пневмоаккумулятора, што-. ком с буртиком, установленным в ко-, жухе соосно бойку и с выходом и полость пневмоаккумулятора, и фиксатором положения штока, причем отношение минимального расстояния между корпусом-бойком и буртиком штока к сумме минимального расстоягЙя между штоком и бойком и максимального расстояния между хвостовиком рабочего инструмента и бойком для работы ударного устройства в режиме бурения равно единице. 2.Устройство по П.1, о т л и с ч а юще е ся тем, что фиксатор S положения штока выполнен в виде обел разованной кожухом и штоком полости, связанной с источником питания. 3.Устройство по П.1, отличающееся тем, что фиксатор положения штока выполнен в виде винта, установленного в кожухе с возможностью взаимодействия со штоком. со О5 . со 00
| РЕВЕРСИВНЫЙ ГИДРОПРОБОЙНИК ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН | 0 |
|
SU407013A1 |
| Реверсивный ударный механизм для проходки скважин | 1976 |
|
SU600261A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
