1 11
Изобретение относится к устройствам для управления электроприводом шлифовально-полировального станка, применяемого в оптико-механической промьпаленности.
Цель изобретения - повышение надежности, упрощение наладки устройства и повышение быстродействия.
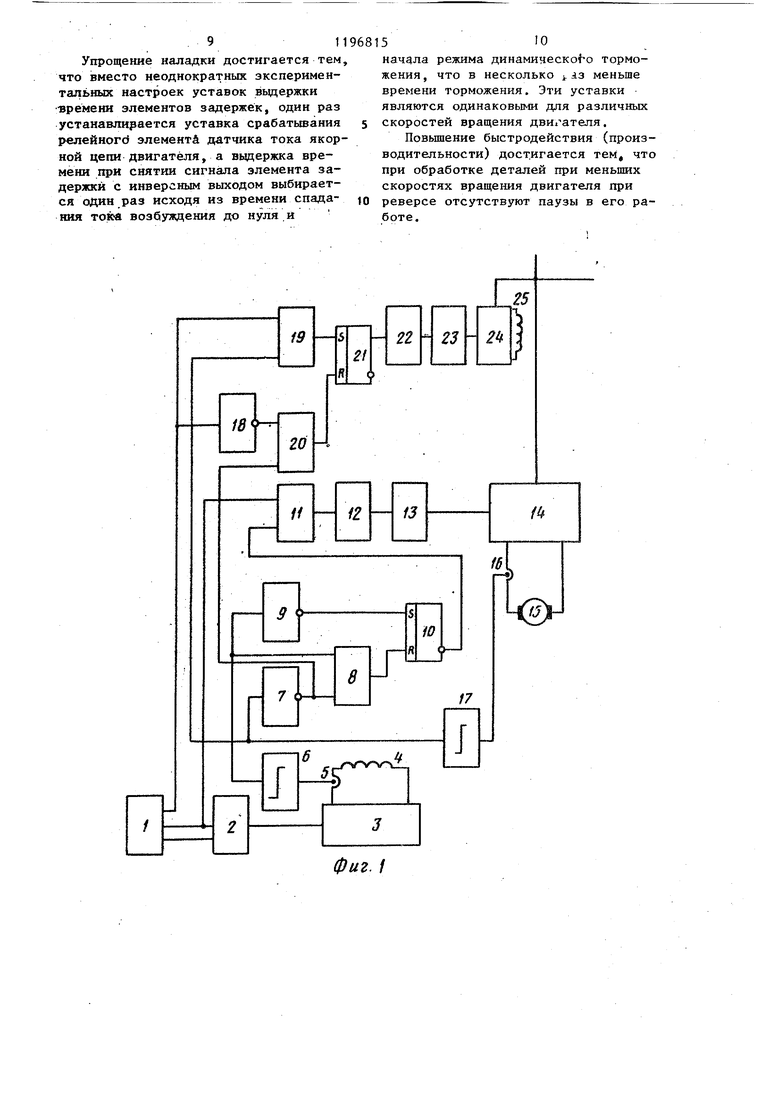
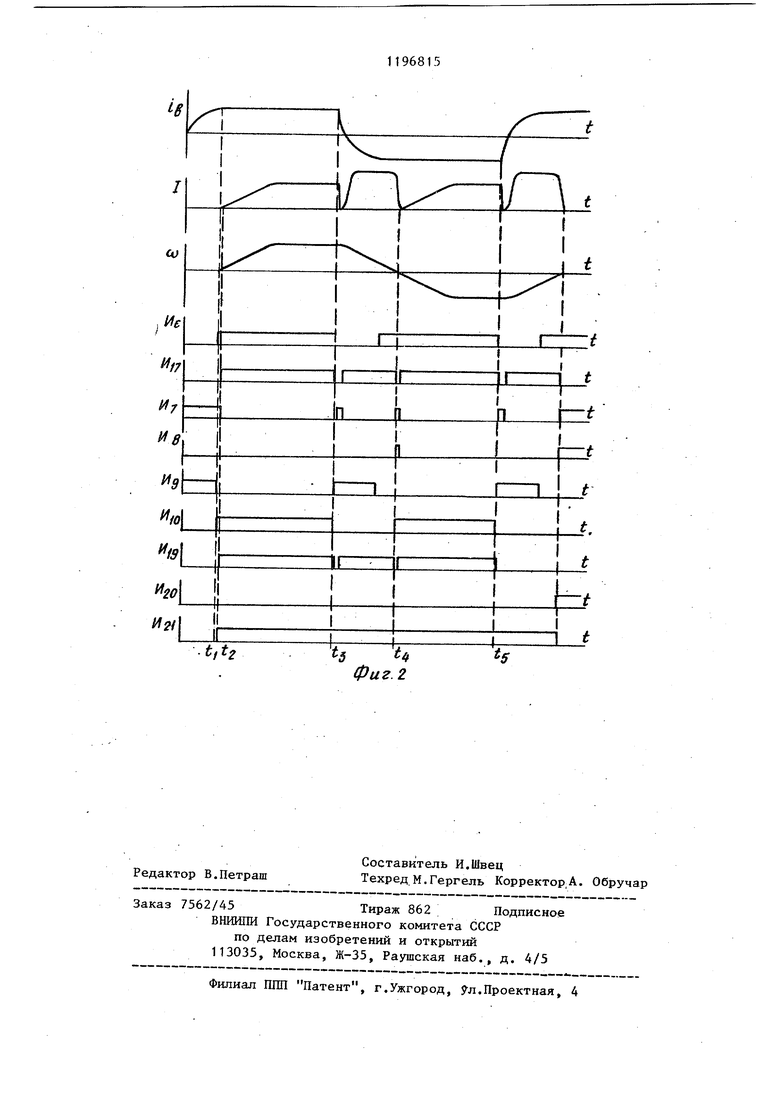
На фиг. 1 представлена функциональная схема устройства , на фиг.2 временная диаграмма его работы.
Устройство содержит пульт 1 управления, блок 2 реверсирования, блок 3 управления обмоткой возбуждения двигателя шпинделя, обмотку 4 возбуждения датчик 5 тока возбуящения, релейный элемент 6, первьш элемент НЕ 7, четвертьш элемент И 8, второй элемент НЕ 9, первый RS-триггер 10, первьш элемент И -11, первый узел 12 блокировки, блок 13 управления якорем двигателя шпинделя, выпрямитель 14, якорь двигателя 15 шпинделя, датчик 16 тока якорной цепи, второй релейньм элемент 17, элемент 18 задержки с инверсным выходом, второй элемент И 19, третий элемент И 20, второй R5-триггер 21, второй узел 22 блокировки, генератор 23 импульсов, блок 24 управления механизмом давления, обмотка 25 электромагнита пневмоэлектрозолот-.
ника.
I,
На фиг, 2 обозначено: ig- ток воз.буждения 3 - ток в .обмотке якоря двигателя СО - скорость вращения}
(JP и (J - сигналы на выходе соответственно, реле.йных элементов. 17 и 6; 0 иОд- сигналы на выходе первого 7 ивторого 9 элементов НЕ соответственно; U g , U . и сигнаы на выходе четвертого 8, второго 19 и третьего 20 элементов И соответственно; U щ- сигнал на инверсном выходе первого R5-триггера 10;
и, сигнал на прямом выходе второ- го RS-триггера 21; tf - момент, когда ок возбуждения достиг номинальной еличины, 12 момент включения пневозлектрозолотникаJ з момент перелючения блока управления обмоткой озбуждения двигателя шпинделя; т, - момент окончания режимадинамиеского торможения; 4с - момент поачи команды tg - момент откючения пневмоэлекрозолотника.
Устройство работает следующим бразом.
132
Пульт 1 обеспечивает работу станка с включением или без включения пневматического нагрузочного устройства. В обоих случаях привод может
работать с реверсрм или без него. Включение пульта 1 на соответствующий режим производит оператор переключением переключателя режима работы. КромеТОГО, он устанавливает
длительность цикла обработки детали и подает команду Пуск. Команда Стоп подается пультом 1 автоматически посредством реле времени или оператором вручную в случае
необходимости. До подачи команды Пуск на всех выходах пульта 1 имеются сигналы Логический нуль. Сигнал .О с выхода пульта подается на вход элемента 18 задержки и первый вход элемента И 19. Сигнал О с другого выхода пульта 1 подается на первьй вход элемента М 11 и через блок 2 реверсирования на блок 3, что исключает появление тока возбуждения в обмотке 4. Так как отсутствует ток 6 обмотке 4 во буждения, то на выходе второго релейного элемента 6, вход кото- рого соединен -с датчиком 5 тока возбуждения, имеется сигнал О, который подается на вход элемента НЕ 9 и первый вход второго элемента И 8.
На выходе второго элемента НЕ 9
существует сигнал 1, который подается на 5-вход RS-триггера 10, .на инверсном выходе которого появляется сигнал О, подаваемьй на второй вход элемента И 11. На выходе
элемента И 11 имеется сигнал О и узел 12 блокировки не разрешает работу блока 13 управления и выпрямителя 14. Якорь двигателя 13 шпинделя не получает питания, и на выходе
релейного элемента 17, вход которого соединен с датчиком 16 тока якорной цепи существует сигнал О, которьй подается на второй вход элемента И 19 и вход элемента .НЕ 7. На выходе элемента НЕ 7 появляется сигнал 1, которьш подается на вторые входы элементов И 8 и 20 соответственно. На первом входе элемента И 20 присутствует сигнал 1 с инверсного выхода элемента 18 задержки. В результате этого на выходе элемента И 20 появляется сигнал 1, который подается на R -вход R5 -триггеpa 21, на 5 -входе которого присут ствует сигнал О с выхода элемента И 19. На прямом выходе R5-триггера 21 появляется сигнал О и узел 22 блокировки не разрешает работу генератора 23 импульсов блока 24 для ..управления обмоткой 25 электромагнита. Пневматическое нагрузочное устройство не включено. На выходе элемента И 8 существу ет сигнал О, подаваемый на R -вх R5-тpиггepa 10, и на его выходе продолжает оставаться сигнал О, подаваемый на второй вход элемента И 1 1 . При работе с включением пневматического нагрузочного.устройства и реверсом после команды Пуск на всех выходах пульта 1 одновременно появляются сигналы логической 1. Сигнал .1 с выхода пульта 1 подается через блок 2 реверсирования на блок 3, что обеспечивает появле тока возбуждения в обмотке 4 (фиг. Пока ток возбуждения не достигнет номинальной величины, на выходе релейного элемента 6 остается сигнал подаваемый на вход второго эл мента НЕ 9 и первьй вход элемента И 8, В результате этого вкодные команды на R5 -триггере 10 не меняю ся и на инверсном его выходе сохра« ется команда О, подаваемая на вто рой вход элемента И 11, на первый вход которого поступает сигнал 1 с .выхода пульта 1 (фиг. 2). На выходе элемента И 11 сохраняется сигнал О и узел 12 блокировки не раз решает работу блока 13 управления и вьшрямителя 14, пока ток возбужде ния не достигнет номинальной велиСигнал 1 с выхода пульта 1 подается на первьш вход элемента И 19 и вход элемента НЕ 18. На выходе элемента И 19 сохраняется сигнал О, подаваемый на 5 -вход Кб-триггера 21, а на инверсном выхо де элемента 18 задержки появляется сигнал О, подаваемый на первый вход элемента И 20, в результате че го на его выходе появляется сигнал О, подаваемый нaR-вxoдR5триггера 21.RS -Триггер 21 остается в прежнем состоянии и на его прямом выходе сохраняется сигнал О, не разрешающий включение пневматическо го нагрузочного устройства, пока 15 якорь двигателя 15 неподвижен (фиг. 2). Когда ток возбуждения достигнет номинальной величины (фиг. 2), на выходе релейного элемента 6 появится сигнал 1 , подаваемый на вход элемента НЕ 9 и первый вход элемен- . та И 8, на втором входе которого присутствует сигнал 1 с выхода элемента НЕ 7, так как по якорю двигателя 15 ток не протекает. В результате этого на выходе элемента НЕ 9, соединенного с S -входом RS-триггера 10, появляется сигнал О, а на выходе элементд И 8, соединенного с R-входом R5 -триггера 10, - сигнал 1, которьлй перебрасывает RS-триггер 10 во второе устойчивое состояние, и на его инверсном выходе появляется сигнал 1 (фиг. 2), подаваемый на вход элемента И 11, на первый вход которого поступает сигнал 1 от выхода пульта 1. В результате этого узел 12 блокировки разрешает работу блока 13 и вьшрямителя 14 и осуществляется питание якоря двигателя 15. Электродвигатель привода начиг ает работать (фиг. 2). При определенном уровне тока в якоре двигателя 15 на выходе релеййого элемента 17, соединенного с датчиком 16 тока якорной цепи,появляется сигнал 1 (фиг. 2), подаваемый на второй вход элемента И 19 и вход элемента НЕ 7. Так как на первом входе элемента И 19 уже присутствует сигнал 1 с выхода пульта 1, то на его выходе появляется сигнал 1, подаваемый на S -вход R5 -триггера 21 и перебрасывакнций его во второе устойчивое состояние. На прямомвыходе,RS-триггера 21 появляетсясигнал 1 (фиг. 2). В результате этого узел 22 блокировки разрешает работу генератора 23 импульсов блока 24 для управления обмоткой 25 электромагнита. Включается пневматическое нагрузочное устройство (не показано) с вьщержкой времени после включения электродвигателя шпинделя. Блок 2 реверсирования предназначен ля автоматического управления блоком 3 как при работе с реверсом, так и без реверса. При работе с ревером с выхода пульта 1 на блок 2 посупает команда 1.. При наличии коанды 1 с выхода пульта 1 блок 2
начинает отсчет выдержки времени Вперед, и по истечении времени работы электродвигателя привода Вперед на выходе блока 2 происходит переключение команд, вызывающих переключение блока 3 управления и начинается отсчет времени Назад блоком 2, По истечении времени работы электродвигателя привода Назад опять происходит переключение команд на выходе блока 2 и осуществляется переключение блока 3 - происходит изменение направления тока возбуждения.
При переключении блока 3 ток возбуждения в обмотке 4 электродвигателя начинает уменьшаться и на выходе второго релейного элемента 6 появляется сигнал О, который подается на вход элемента НЕ 9 и первьй вход элемента И 8 (фиг, 2). В результате этого на выходе элемента НЕ 9 появляется сигнал 1, подаваемый на 5-вхо Н5-триггера 10, а на выходе элемента И 8 -. сигнал О, подаваемьй на R-вход триггера 10, R5 -триггер 10 перебрасывается Ё первое устойчивое состояние, на его инверсном вькоде появляется сигнал О (фиг, 2), подаваемый на второй вход элемента И 115 что приводит к выключению первого узла 12 блокировки. Происходит запирание выпрямителя 14 и осуществляется режим динамического торможения якоря электродвигателя привода. Исчезновение тока в якорной цепи двигателя 15с момента запирания выпрямителя 14 и до момента начала режима динамического торможения
.вызывает появление.сигнала О .на. выходе релейного элемента 17, который подается на второй вход элемента И 19, На его выходе появляется
сигнал О, подаваемый на 5-вход второго RS-триггера 21, оставляя его в прежнем состоянии (фиг, 2), Пневматическое нагрузочное устройство
не отключается. t
Торможение электродвигателя начинается с момента изменения направления тока возбуждения (фиг, 2), при этом величины тока возбуждения и тока динамического торможения контролируются соответственно датчиками 5 и 16 тока. Когда ток возбуждения достигнет значения, близкого к номинальному, на выходе второго релейного элемента 6 появится сигнал 1, который подается на первый вход элемента И 8 и входэлемента НЕ 9, На выходе элемента НЕ 9 появляется сигнап О, подаваемый на 5-вход RS -триггера 10, который оставляет его в прежнем состоянии. Пока в обмотке якоря протекает ток динамического торможения на выходе релейного элемента существует сигнал 1, подаваемый на вход элемента НЕ 7 и элемента И 19, На выходе элемента НЕ 7 существует сигнал О, подаваемый на вход элемента И 8 и вход элемента И 20, в результате чего на выходе элемента И 8 остается сигнал О RS -триггер 10 остается в первом устойчивом состоянии. На его инверсном выходе сохраняется команда О (фиг, 2), и выпрямитель 14 остается блокированным, пока протекает ток динамического торможения в якоре двигателя 15. R6-Триггер 21 также остается в прежнем состоянии, и отключения превматического нагрузочного устройства не происходит (фиг, 2),
Когда ток динамического торможения спадает до величины, близкой к нулю, на выходе релейного элемента 17 появляе.тся сигнал О, а на выходе элемента НЕ 7 - сигнал 1., которьй подается на вход элемента И 8, на первом входе которого присутствует сигнал 1 с выхода релейного элемента 6 (фиг, 2), В результате этого на выходе элемента И 8 появляется сигнал 1, подаваемый на R-вход RS -триггера 10 и перебрасывающий его во второе устойчивое состояние. На инверсном выходе КЭ-триггера 10 появляется сигнал 1 подаваемый на второй вход элемента И 1 1 (фиг, 2), Узел 12 блокировки разрешает работу блока 13 и выпрямителя 14, осуществляется пуск якоря электродвигателя в противоположном направлении. Таким образом, исключается возможность появления режима противовключения при реверсе, так как выпрямитель 14 может быть включен только после окончания режима торможения двигателя. Ввиду того, что включение двигателя происходит сразу после остановки, исключаются паузы при реверсе, что способствует повышению быстродействия устройства,
При подаче команды Стоп оператором или (при автоматическом отклю7чении) от реле времени, задающего цикл обработки, на выходах пульта..1 сигналы равны О. Появление сигнала на выходе пульта 1 приводит к переключению команд на выходе бло ка 2. При этом происходит переключение блока 3 и осуществляется режи динамического торможения (фиг. 2). Сигнал с выхода пульта, равный О, одновременно подается на вход элемента И 11, и на выходе последнего появляется, соответственно, также сигнал О. Узел 12 блокировки блокирует блок 13 и якорь отключается от источника питайия - электродвига тель привода останавливается. Сигнал с выхода пульта, равный О, подает ся на первьй вход элемента И 19 и на вход элемента 18 задержки с инверсным выходом. В результате этого на выходе элемента И 19 получаем сигнал О, т.е. снимается команда с 5-входа RS -триггера 21 (фиг. 2). Элемент 18 задержки обеспечивает выдержку времени при снятии сигнала 1 с его входа до появления на инверсном выходе сигнал 1. Вы держка времени элемента 18 определя ется периодом времени с момента бло кировки выпрямителя 14, когда ток в якорной цепи спадает до нуля, и до момента начала режима динамического торможения, когда на выходе релейного элемента 17 появится сигнал 1. Наличие такой задержки вре мени исключает аварийное отключение пневмоэлектрозолотника и снятие дав ления, на максимальной скорости, так как на выходе элемента И 20 на все время торможения сохраняется сигнал О, который подается на R -вход RS-триггера 21, оставляя его в преж нем состоянии. По истечении вьщержки времени элемента 18 задержки на его инверсном выходе появляется сигнал 1, которьй подается на вход элемента И 20. Так как уже начался процес дина1 1ического торможения, то на выходе первого релейного элемента 17 существует сигнал 1, а на выходе элемента НЕ 7 - сигнал О, который подается на второй вход элемента И 20. На его выходе сохраняется сигнал О, иЯ5-триггер 21 остается В прежнем устойчивом состоянии (фиг. 2). Когда торможение якоря дви гателя 15 заканчивается, и ток дина15 . мического торможения спадает до нуля, на выходе первого релейного элемента 17 появляется сигнал О, а на выходе элемента НЕ 7 - сигнал 1, который подается на вход элемента И 20, На входе элемента И 20 присутствует сигнал 1 с инверсного выхода элемента 18 задержки, поэтому на выходе элемента И 20 появляется сигнал 1, которьй подается наR-вход RS-триггера 21, перебрасывая его во второе устойчивое состояние. На прямом выходе триггера 21 появляется сигнал О (фиг. 2). Узел 22 блокировки блокирует работу генератора 23 импульсов блока 24 для управления обмоткой 25 электромагнита. Пневматическое нагрузочное устройство отключается при скорости двигателя, близкой к нулю, что исключает повреждение детали инструментом, так как не происходит склеивания инструмента и детали после остановки, если давление снимать позже. При работе без реверса на первых выходах пульта 1 сигналы равны 1, а на втором выходе, сигнал равен О. В результате этого не происходит изменения направления тока возбуждения и электродвигатель все время вращается в одном направлении. При необходимости работы на станке без включения пневматического нагрузочного устройства, например при ручной притирке, на пульте 1 отключают переключателем режима работ блок 24 управления механизмом давления. Поэтому при команде Пуск сигнал на выходе пульта 1 равен О, в то время как сигналы на других входах рав1. Пневматическое нагрузочное устройство не включается, в остальном система работает, как описано выТаким образом, повышение надежности достигается тем, что исключается возможность появления режима противовключения при реверсе, а еле-, довательно, и динамических ударов при увеличении скорости обработки (по сравнению с наладочной), а также исключается возможность повреждения детали при остановке, так как отключение пневматического нагрузочного устройства происходит всегда при токе якоря двигателя, близком к нулю-.
911968
Упрощение наладки достигается тем, что вместо неоднократных экспериментальных настроек уставок вьщержки времени элементов задержек, один раз устанавлирается уставка срабатьшания s релейногд элемента датчика тока якорной цепи двигателя, а вьщержка времени при снятии сигнала элемента задержки с инверсньм выходом выбирается один раз исходя из времени спада- ю НИН ТОК& возбуждения до нуля и
510
начала режима динaмичecкo o торможения, что в несколько АЗ меньше времени торможения. Эти уставки являются одинаковыми для различных скоростей вращения двигателя.
Повьшение быстродействия (производительности) достигается тем, что при обработке деталей при меньших скоростях вращения двигателя при реверсе отсутствуют паузы в его работе.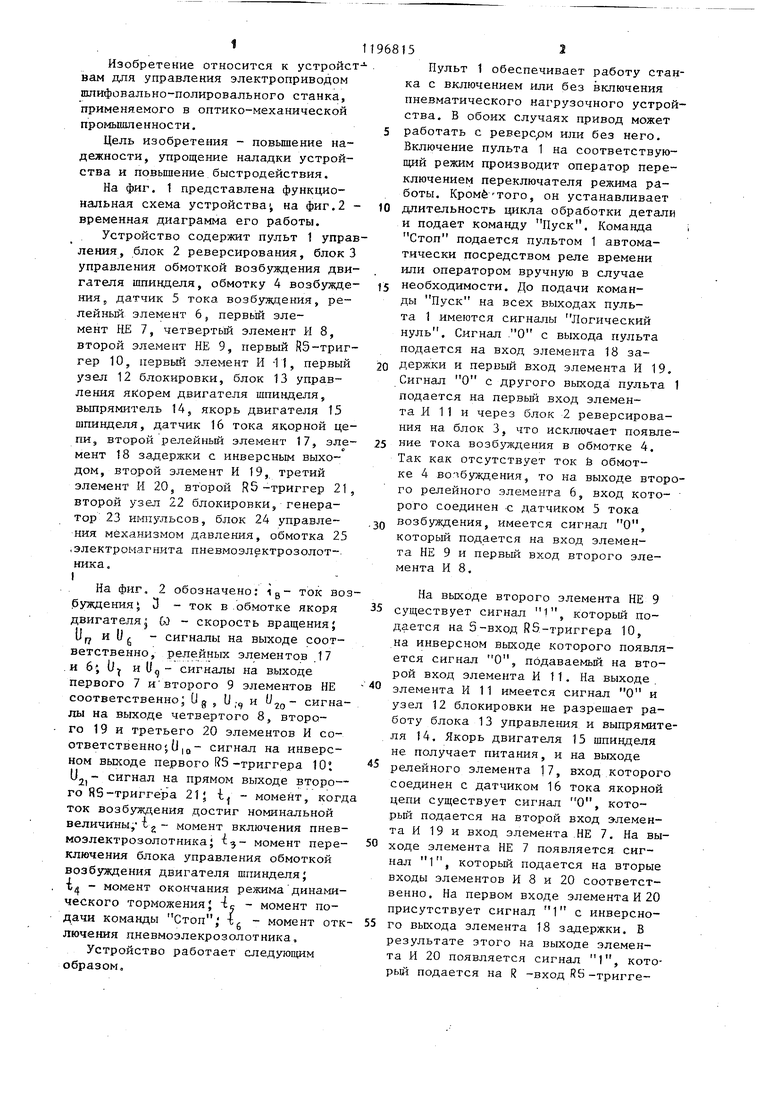
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом шлифовально-полировального станка | 1974 |
|
SU717722A1 |
| Способ управления тиристорным электроприводом постоянного тока транспортного средства | 1987 |
|
SU1415397A1 |
| Устройство для управления тяговым электроприводом постоянного тока транспортного средства | 1984 |
|
SU1270039A1 |
| Система управления вентильным многодвигательным электроприводом | 1981 |
|
SU1109849A1 |
| Электропривод постоянного тока | 1991 |
|
SU1786630A1 |
| Формирователь сигнала обратной связи для устройства управления шаговым двигателем | 1981 |
|
SU970325A1 |
| Двухзоннорегулируемый электропривод с реверсом возбуждения | 1982 |
|
SU1034139A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| Устройство для управления стендом прикатки зубчатых передач | 1986 |
|
SU1413601A1 |
| Преобразователь перемещения в код | 1986 |
|
SU1363463A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ; ЭЛЕКТРОПРИВОДОМ ШПИФОВАЛЬНО-ПОЛИРОВАЛЬНОГО СТАНКА, содержащее пульт управления, подключенньй первыми выходами через блок реверсирования к входу блока управления обмоткой возбуждения двигателя шпинделя, датчик токи, соединенный с обмоткой возбуждения двигателя шпинделя, последовательно соединенные первый элемент И, первый узел блокировки и блок управления якорем двигателя шпинделя, первый элемент задержки, а также последовательно соединенные второй узел блокировки, генератор импульсов и блок управления механизмом давления, отличающееся тем, что, с целью повьш1е- НИН надежности, упрощения наладки и повышения быстродействия устройства, в него введены первый и второй релейные элементы, второй и третий элементы И, датчик тока якорной цепи, первый элемент НЕ, первый Кб-триггер, а также последовательно соединенные второй элемент НЕ, четвертый элемент И и второй КЗ-триггер, инверсный выход которого соединен с первым входом первого элемента И, 5-вход через первый элемент НЕ подключен к второму входу четвертого элемента, И и к выходу первого релейного элемента, вход которого соединен с датчиком (Л возбуждения, вход второго элемента НЕ через второй релейный элемент соединен с датчиком тока якор§ ной цепи и с первым входом второго элемента И, подключенного вторым входом к второму выходу пульта управления и через элемент задержки со к первому входу третьего элемен05 та И, второй вход которого соединен 00 с выходом второго элемента НЕ, а выход - с R -входом первого RS-тригсд гера, прямой выход которого соединен с входом второго узла блокировки, а 5 -вход - с выходом второго элемента И.
| Сулим А.В | |||
| Производство оптических деталей | |||
| - М.: Высшая школа, 1969, с | |||
| Раздвижной паровозный золотник с подвижными по его скалке поршнями между упорными шайбами | 1922 |
|
SU148A1 |
| Устройство для управления электроприводом шлифовально-полировального станка | 1974 |
|
SU717722A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
