пульсного датчика угла подключен к объединенным между собой вычитающему входу реверсивного счетчика и входу преобразователя чатоты следования
импульсов, а выходы постоянных запоминающих блоков образуют выходы формирователя гармонических функ- «; ций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Устройство для управления электродвигателем переменного тока в следящем режиме | 1980 |
|
SU944047A1 |
| Электропривод | 1978 |
|
SU797043A1 |
| Устройство для управления электродвигателем | 1987 |
|
SU1633475A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1989 |
|
SU1646035A2 |
| Электропривод переменного тока | 1986 |
|
SU1334342A1 |
Изобретение относится к электротехнике, а именно к регулир,уемым электроприводам на базе асинхронной машины с фазным ротором, и может бьггь использовано в системах и механизмах общепромыпщенного.назначения, где требуется регулирование скорости вращения относительно синхронной.
Целью изобретения является повышение точности управления скоростью вращения.
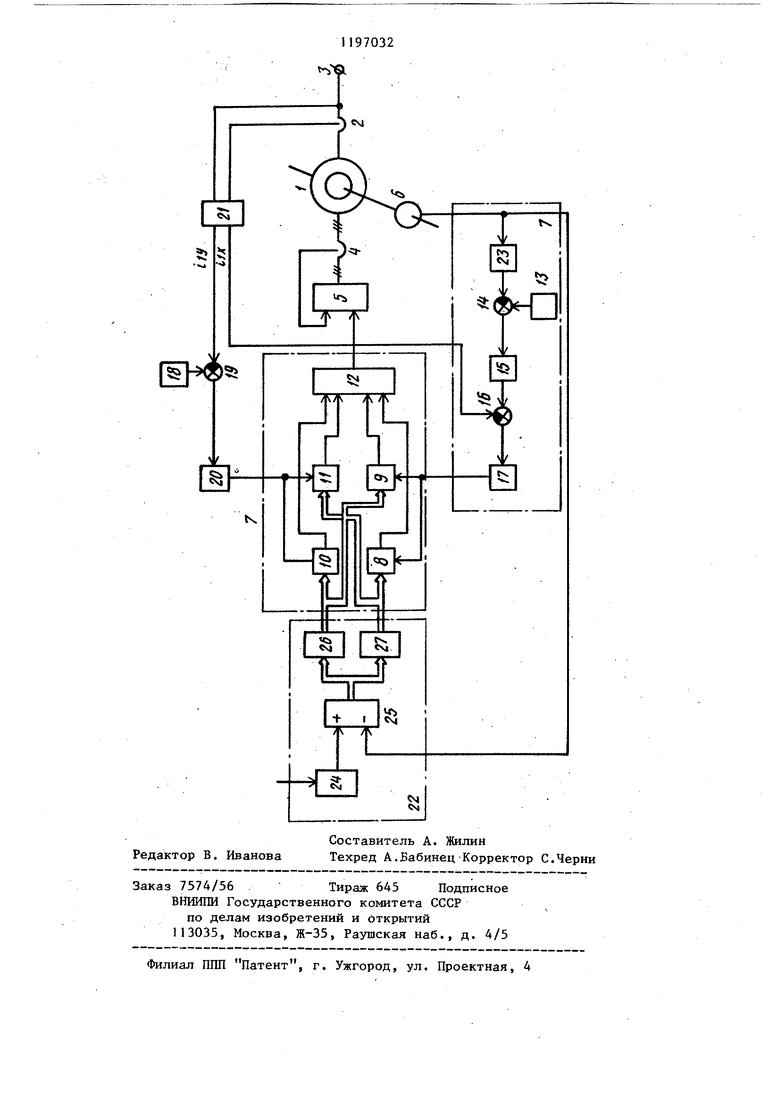
На чертеже представлена функциональная схема электропривода переменного тока.
Электропривод содержит асинхронный двигатель 1 с фазным ротором, статорные обмотки которого через датчики 2 фазных токов статора соединены с клеммами 3 для подключения пи тающей сети, а роторные обмотки через датчики А фазных токов ротора подключены к выходам регулируемого источника 5 тока, датчик 6 углового положения ротора, установленный на валу асинхронного двигателя 1 с фаз ным ротором, координатный преобразователь 7, снабженный четырьмя умножителями 8-11, и блоком 12 сумматоров и подключенный выходами к управлякяцим входам регулируемого источник 5 тока.
Электропривод переменного тока содержит , кроме того, последовательно соединенные задатчик I3 скорости, первый элемент 14 сравнения, регулятор 15 скорости, второй элемент 16 сравнения, регулятор 17 активного тока статора и последовательно соединенные задатчик 18 реактивного тока статора, третий элемент 19 сравнения и регулятор 20 реактивного тока статора, блок 21 вычисления активного и реактивного тока статора, соединенный входами с выходами датчиков 2 фазных токов статора и с клеммами 3 для подключения питающий сети, формирователь 22 гармонических функций частоты токов ротора, выходы которого подключены к опорным входам координатного преобразователя 7, при это выходы блока 21 вычисления активного и реактивного тока статора подключены к одноименным входам соответственно второго и третьего элементов 16 и 19 сравнения, а выхода регуляторов 17 и 20 активного и реактивного токов статора подключены к одноименным управляю1цим входам координатного преобразователя 7.
В электропривод переменного тока .введен преобразователь 23 частоты следования импульсов, подключенный выходом к другому входу первого элемента 14 сравнения. Датчик 6 углового положения ротора выполнен в виде фотоэлектрического частотно-импульсного датчика угла, умножители 8-11 координатного преобразовантеля 7 выполнены в виде цифро-аналоговых блоков . Формирователь 22 гармонических функций частоты токов ротора снабжен генератором 24 импульсов с подстройкой частоты, реверсивным счетчиком 25 и двумя постоянными запоминающими блоками 26 и 27, запрограммированными соответственно по закону синуса и косинуса, входы которых подключены к выходу реверсивного счетчика 25, соединенного суммирую1Ш1м входом с выходом генератора 24 импулсов с подстройкой частоты. Выход фотоэлектрического частотно-импульсного датчика 6 угла подключен к объединенным между собой вычитающему входу реверсивного счетчика 25 и входу преобразователя 23 частоты следования импульсов, а выходы постбянных запоминающих блоков 26 и 27 образуют выходы формирователя 22 гармонических функций.
Электропривод перменного тока работает следующим образом.
На суммирующий вход реверсивного счетчика 25 поступают импульсы с час тотой .следования с выхода генератора 24 импульсов. Частота f под страивается таким образом, чтобы за период частоты питающей сети н выхо де генератора 24 импульсов было Z/p импульсов, где р - число пар полюсов Ьшпульсов с выхода датчика 6 угла за один оборот вала, т.е.
где We частота питающей сети,
равная « 50 Гц.
На вычитающий вход реверсивного, счетчика 25 поступают импульсы с выхода фотозлектрического частотноимпульсного датчика 6 угла с частотой .
д-г;-);
(.2)
где (Ор- частота вращения ротора.
На выходе реверсивного счетчика 25 формируется информация в виде кода ISi С постоянных запомииапцих блоков 26 и 27, запрограммированных по закону синуса и косинуса, формируются коды sin И и cos N, поступающие на цифровые входы сбответствую1ф1х умножителей 8-11.
Если емкость реверсивного счетчика 25 выбрать равной /р , то частота повторения кода N на его выходе с учетом (1) и (2) будет равна
ic-i
i
СОе-р г в
N г/р
(3) Us частота скольжения.
1970324
Следовательно коды sin Ни cos N соответствуют кодам гармонических функций частоты токов ротора. ,
На аналоговые входы умножителей 5 10 и 11 с выхода регулятора 20 реактивного тока статора поступает сиг. нал задания Уц , определяняций амплитуду составляющей тока ротора по оси «j . На аналоговые входы умножи10 тепей В и 9 поступает регулятор 17 активного тока статора сигнал t/x, определяющий амплитуду составляющей тока ротора по оси у( , .
Полученные на.выходах умножителей 8-11 сигналы преобразуются с помощью блока 12 сумматоров в сигналь задания токов ротора по Ьсям d, , а зат«м в сигналы задания фазных токов, поступающие на управляющие 20 входы управляемого источника 5 тока, при этом обеспечивается управление acHHxpoHHbD4 двигателем 1 с фазным ротором с любым числом пар полюсов р.
25 Таким образом, введение в электропривод преобразователя частоты сле.дования импульсов, выполеш е датчика угла в ющё фотозлектрического частотно-импульсного датчика угла, JQ выполнение умножителей координатного преобразователя в виде цифро-ана.логовых блоков и введение в состав формирователя гармонических функций генератора импульсов, реверсивного . счетчика и двух постоянных запоминакщак блоков, запрограммированных по закону синуса и косинуса, позволяет формировать управляющие сигна,лы электропривода уВ цифровом виде, что обеспечивает более высокую точность Управления скорости вращения в сравнении с известным рещением, основанным на преобразовании аналоговых сигналов.
| 0 |
|
SU675368A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Онищенко Г.В., Локтева И.Л., Асинхронные вентильные каскады и двигатели двойного питания | |||
| М.: Энергия, 1979, с | |||
| Способ подпочвенного орошения с применением труб | 1921 |
|
SU139A1 |
