(5) УСТРОЙСТВО для УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА В СЛЕДЯЩЕМ РЕЖИМЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1985 |
|
SU1283929A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
| Электропривод переменного тока | 1984 |
|
SU1197032A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Электропривод переменного тока | 1988 |
|
SU1577060A1 |
| Устройство для управления электродвигателем | 1987 |
|
SU1633475A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
1
Изобретение относится к электротехнике и может быть использовано в управляемом электроприводе на базе короткозамкнутого асинхронного и синхронного двигателей, применяемом в отраслях народного хозяйства, где требуется высокая точность воспроизведения заданных параметров управления, в частности, в станках с числовым программным управлением.JQ
Известно устройство для управления асинхронным двигателем, содержащее координатный преобразователь, связанный через узлы с релейными характеристиками с преобразователем энергии ts на ключевых элементах, который подключен к обмоткам асинхронного двигателя Cl .
Недостаток этого устройства состоит в низкой точности воспроизведения 20 заданного движения, что определяется низкой точностью используемых датчиков и сложностью аналоговых координатных преобоаяпчаний.
Наиболее близким техническим решением к изобретению является устройство для управления электродвигателем переменного тока в следящем режиме, в котором реализуются скользящие режимы. Это устройство содержит два формирователя сигнала линейной комбинации ошибки управления и ее производ ных, датчик фазных составляющих потокосцепления ротора, подключенный к первой группе входов координатного преобразователя, выход которого связан через преобразователь числа фаз и блок (}юрмирователей релейных сигналов с входом преобразователя энергии на ключевых элементах, выход которого связан с обмотками статора асинхронного электродв1 гателя, два узла с нелинейными характеристиками типа гистерезис, вход каждого из которых подключен к выходу одного из ({юрмирователей сигнала комбинации ошибки-управления и ее производных, а выходы подключены к второй группе 39 входов координатного прёобразователя fZJ. Это устройство принципиально може обеспечить высокую точность управления, однако в промышленных условиях эту точность реализовать не удается по следующим причинам: непосредствен ное измерение фазных составляющих потокосцепления ротора ограничивается значительной температурной нестабильностью датчиков и сложностью их встройки в двигатель, широкое применение импульсных датчиков положения приводит к необходимости осущест влять коррекцию формирователя сигнал линейной комбинации ошибки по положа Нию и ее производных при помощи сигнала о моменте двигателя, который в этом устройстве не формируется. Kp того, указанное устройство имеет схему формирования команд управления, содержащую аналоговый координат ный преобразователь и аналоговый пре образователь числа фаз. Все это снижает точность и надежность устройства и ограничивает область его применения. Цель изобретения - повышение точности и надежности управления электродвигателями переменного тока. Указанная цель достигается9тем, что в устроиство для управления элек родвигателем переменного тока в следящем режиме, содержащее преобразователь энергии на ключевых элементах импульсный датчик положения ротора, два формирователя сигнала линейной комбинации ошибки управления и ее производных, выходы которых соеди нены с входами двух узлов с нелинейными характеристиками типа гистерезис, выходы которых подключены к соответствующим входам логического формирователя команд управления, а выход последнего подключена управля ющему входу преобразователя энергии
на ключевых элементах, преобразователь координат, введены датчик фазных токов статора, преобразователь аналог-частота, два реверсивных счетчика, .постоянный запоминающий блок значений синуса и косинуса угла, причем входы преобразователя координат соединены с выходами датчика токов и выходами постоянного запоминающего блока значений синуса и косинуса угла, а выходы его соединены с входом преобразователя аналог-частота, с входом первого формирователя сигнала
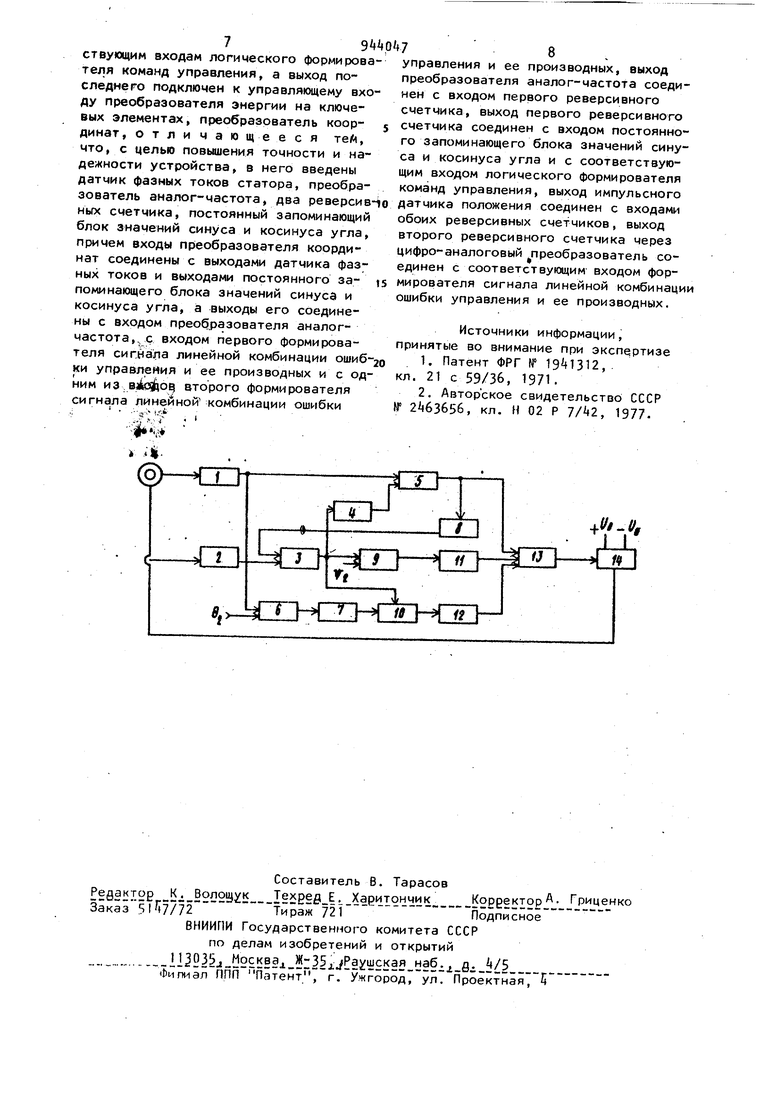
анало -частота, с входом первого формирователя 9 сигнала линейной комбинации ошибки управления и ее производных и с одним из входов второго формирователя 10 сигнала линейной комбинации ошибки управления и ее произ- водных, выход преобразователя k аналог-частота соединен с входом первого реверсивного счетчика 5, выход которого соединен с входом блока Вис соответствующим входом логического формирователя 13 команд управления; выход импульсного датчика 1 положе74инейной комбинации ошибки управления и ее производных и с одним из входов второго формирователя сигнала линейной комбинации ошибки управления и ее производных, выход преобразователя аналог-частота соединен с входом первого реверсивного счетчика, выход первого реверсивного счетмика соединен с входом постоянного запо/«1на1С«цего блока значенийсинуса и косинуса угла и с соответствующим входом логического формирователя команд управления, выход импульсного датчика положения соединен с входами обоих реверсивныхсчетчиков, выход второго реверсивного счетчика через цифро-аналоговый Преобразователь соединен с соответствующим входом второго- формирователя сигнала линейной комбинации ошибки управления и ее производных. На чертеже представлена блок-схема устройства для управления электродвигателем переменного тока в следя1цем режиме. Устройство содержит импульсный датчик 1 положения ротора, датчик 2 фазных токов статора, преобразователь 3 координат, преобразователь аналог-частота, реверсивные счетчики 5 и 6, цифро-аналоговый преобразователь 7, постоянный запоминающий блок 8 значений синуса и косинуса угла, формирователи 9 и 10 сигнала линейной комбинации ошибки управления и ее производных, два узла 11 и 12 с нелинейными характеристиками типа гистерезис, логический формирователь 13 команд управления, преобразователь энергии Н на ключевых элементах, при этом входы преобразователя 3 координат соединены с выходами датчика 2 фазных токов и выходами постоянного запоминающего блока 8 значений синуса и косинуса угла, а выходы его соединены с входом преобразователя «
ния ротора соединен с входами обоих реверсивных счетчиков 5 и 6, выход второго реверсивного счетчика 6 через цифро-аналоговый преобразователь 7 соединен с соответствующим вхр дом формирователя 10 сигнала линейной комбинации ошибки управления и ее производных, выходы формирователей 9 и 10 через узды 11 и 12 соединены с логическим формирователем 13 команд управления.
При управлении асинхронным двигателем устройство работает следующим образом.
j На входы преобразователя 3 координат поступают сигналы о компонентах i , 1л тока статора в неподвижной системе координат от датчика 2 токов и значение синуса и косинуса угла 0ц, вектора потокосцепления ротора с выхода постоянного запоминающего блока 8. На выходах преобразователя 3 .формируются сигналы о компонентах 1,, 1ft тока статора в системе координатj вращающейся синхронно с вектором потокосцепления ротора. Сигнал компоненты ijj- содержащий информацию о ли нейной комбинации потокосцепления ротора и его производной, поступает на вход формирователя 9. На другой вход формирователя 9 поступает сигнал о Заданном потокосцеплении. Сигнал о компоненте in пропорциональной моменту двигателя, поступает на вход преобразователя знало г-частот а и .на корректирующий вход формирователя 10. На выходе преобразователя форми|ауется. последовательность импульсов, частота которых пропорциональна сигналу о компоненте in. Выход датчика 1 положения ротора подключен на соответствующие входы реверсивных счетчиков 5 и 6, на входы которых поступают также сигнал с выхода преобразователя 4 и сигнал о заданном перемещении в соответственно. На выходе реверсивного счетчика 5 формируется код угла положения вектора потокосцепления, который подается на .-вход постоянного запоминающего блока 8 и на соответствующий вход логического формирователя команд управления 13. На выходе реверсивного счетчика 6 формируется сигнал ошибки управления, который через цифро-аналоговый преобразователь 7 поступает на вход формирователя 10. Выходные сигналы формирователей 9 и 10 линейной комбинации ошибки управления и ее производных подаются на входы узлов 11 и 12 с нелинейными характеристиками типа гистерезис, выходы которых подключены к соответствующим входам логического формирователя 13 команд управления. Формирователь вырабатывает релейные сигналы управления клюг, чами преобразователя 14 энергии, который питает двигатель широтно-модулированным напряжением с величиной U(j, таким образом, чтобы в скользящих режимах обеспечивалось равенство нулю сигналов, сформированных в формирователях 9 и 10. В этих режимах изменение во времени регулируемых параметров двигателя не зависит от параметров двигателя и параметров отдельных блоков устройства управления, а определяется изменением во времени заданий на регулируемые параметры, а также коэффициентами, принятыми в линейных комбинациях, ошибок управления и их производных. В случае управления синхронным двигателем преобразователь аналог-частота отключается от входа реверсивного с чет мика 5 что соответствует заданию скольжения, равному нулю. Угол вылета ротора двигателя регулируется изменением сигнала о задании, поступающего на вход формирователя 9. В остальном работа устройства не отличается от ранее рассмотренного случая.
Таким образом, за счет введения в устройство цифро-аналоговой модели асинхронного двигателя удается определить значение ряда параметров двигателя, необходимых для организации скользящего режима, непосредственное изменение которых невозможно производить с высокой точностью. Это позволяет обеспечить высокую точность управления, определяемую в основном, точностью датчиков.
Формула изобретения
Устройство для управления электродвигателем переменного тока в следящем режиме, содержащее преобразователь энергии на ключевых элементах, импульсный датчик положения ротора, двг формирователя сигнала линейной комбинации ошибки управления и ее производных, выходы которых соединены., с входами двух узлов с нелинейными характеристиками типа гистерезис, ;выходы которых подключены к соответствующим входам логического формирова теля команд управления, а выход последнего подключен к управляющему вхо ду преобразователя энергии на ключевых элементах, преобразователь координат, отличающееся reh, что, с мелью повышения точности и надежности устройства, в него введены датчик фазных токов статора, преобразователь анало -частота, два реверсив Hbfx счетчика, постоянный запоминающий блок значений синуса и косинуса угла, причем входы преобразователя координат соединены с выходами датчика фазных токов и выходами постоянного запоминающего блока значений синуса и косинуса угла, а выходы его соединены с входом преобразователя аналогчастота,, с входом первого формирователя сигнала линейной комбинации ошиб ки управления и ее производных и с од ним из второго формирователя сигнала линейной комбинации ошибки управления и ее производных, выход преобразователя аналог-частота соединен с входом первого реверсивного счетчика, выход первого реверсивного счетчика соединен с входом постоянного запоминающего блока значений синуса и косинуса угла и с соответствующим входом логического формирователя команд управления, выход импульсного датчика положения соединен с входами обоих реверсивных счетчиков, выход второго реверсивного счетчика через цифро-аналоговый преобразователь соединен с соответствующим входом формирователя сигнала линейной комбинации ошибки управления и ее производных. Источники информации, принятые во внимание при экспертизе 1.Патент ФРГ № 19tl312, . кл. 21 с 59/36, 1971. 2,Авторское свидетельство СССР № 2А63656, кя. И 02 Р , 1977
