Изобретение относится к электротехнике, а именно к регулируемому электроприводу, построенному на основе асинхронного двигателя с короткозамкнутым ротором, и может быть использовано для управления моментом, скоростью и положением рабочих органов машин и механизмов, например в приводах станков, промышленных роботов и следящих систем различного назначения.
Цель изобретения заключается в повышении точности контроля действительного значения моментообразующей составляющей тока статора.
Это достигается тем, что по предлагаемому способу восстанавливают значение действительной амплитуды фазного тока по величине тока, потребляемого инвертором, формируют код фазы синхронной частоты, осуществляют функциональное преобразование этого кода в код гармонического сигнала, формируют компенсирующий ток, величину которого определяют как произведение амплитуды действительного фазного тока на текущую выборку гармонической функции, сравнивают мгновенные значения фазного и компенсирующего токов между собой и уравновешивают рассогласование, вращая по фазе компенсирующий ток и определяя код сдвига фазы компенсирующего тока, преобразуют код сдвига фазы в код синуса, формируют действительное значение моментообразующей составляющей тока статора как произведение действительной амплитуды фазного тока на текущую выборку кода синуса сдвига фазы и используют этот сигнал в качестве сигнала обратной связи при контроле моментообразующей составляющей тока статора.
В предлагаемое устройство для управления электроприводом введены масштабный элемент (МЭ), двухтактный генератор (ДГ) с двумя выходами, блок синхронизации (БС) с двумя информационными входами, входом управления и двумя выходами и следящий аналого-цифровой преобразователь фазы (АЦПФ) с входами для опорного и измеряемого сигналов, двумя входами для синхронной частоты, входом для тактовой частоты и двумя выходами сигналов рассогласования фазы. Формирователь моментообразующей составляющей тока статора выполнен в виде преобразователя "частота-код" (ПЧК) с двумя информационными входами и входом управления и тригонометрического цифроаналогового преобразователя (ТЦАП) с входом для кода фазы и входом для опорного напряжения.
Блок управления (БУ) снабжен дополнительными выходами синхронной частоты. Выход первого датчика тока подключен к входу для измеряемого сигнала АЦПФ. Выход второго ДТ, включенного в силовую цепь питания БУ, соединен через МЭ с объединенными входами для опорного напряжения АЦПФ и ТЦАП.
Выход задатчика скорости подключен к объединенным входу главной обратной связи БУ и входу управления ПЧК, выход которого соединен с входом для кода фазы ТЦАП. Дополнительные выходы синхронной частоты БУ подключены к информационным входам БС, вход управления которого соединен с первым выходом ДГ. Выходы БС подключены к входам для синхронной частоты АЦПФ, вход для тактовой частоты которого соединен с вторым выходом ДГ. Выходы сигналов рассогласования фазы АЦПФ соединены с информационными входами ПЧК. Информационные входы и вход управления ПЧК являются одноименными входами формирователя моментообразующей составляющей тока статора, выход которого образован выходом ТЦАП.
Известный способ получения информации о действительном значении моментообразующей составляющей тока статора и ее использовании в качестве сигнала обратной связи основан на решении уравнения
Uisx = K [Is sin (ϕst + ε ϕ)˙isy cosϕst -
-Is cos (ϕst +ε ϕ)˙ isy ˙sin ϕst] =
= K Is ˙isy sin ε ϕ= K ˙isy ˙isx, (1) где Is - модуль вектора тока статора;
isx, isy - проекции вектора тока статора на оси декартовой системы координат, ориентированной по вектору потокосцепления ротора Ψr;
ϕs - синхронная фаза тока статора;
ε ϕ- угол сдвига фаз между векторами потокосцепления ротора  и тока статора
и тока статора  ;
;
К - коэффициент пропорциональности.
Этот способ формирования действительного значения моментообразующей составляющей тока статора имеет невысокую точность. Наличие высших гармоник тока статора, а также амплитудные и фазовые погрешности преобразования тока статора в соответствии с соотношением (1) приводят к смещению нуля, нарушению пропорциональности и к появлению в выходном сигнале формирователя составляющих переменного тока с частотами, кратными синхронной частоте, фильтрация которых при большом диапазоне изменения скорости двигателя затруднительна. Кроме того, коэффициент передачи формирователя зависит от величины потокообразующей составляющей тока статора isy* и изменяется при ее регулировании.
При осуществлении предложенного способ управления электроприводом с асинхронным двигателем формируют мгновенные симметричные напряжения на обмотках статора асинхронного двигателя с амплитудой, частотой и фазой, зависящими от измеренной скорости вращения и двух входных воздействий, одно из которых постоянно и соответствует амплитуде потокосцепления ротора, а другое соответствует требуемому моменту и контролируется по действительному значению моментообразующей составляющей тока статора. Формирование сигнала обратной связи осуществляют по действительным значениям мгновенного фазного тока и тока, потребляемого инвертором, с использованием информации о синхронной частоте мгновенных симметричных напряжений на обмотках статора асинхронного двигателя в следующей последовательности.
Восстанавливают значение действительной амплитуды фазного тока Is, измеряя величину постоянного тока, потребляемого инвертором Iинв, по соотношению
Is = 2/3 Iинв (2)
Формируют код фазы синхронной частоты ϕs, которую получают путем развертки во времени требуемой частоты ωs
ϕs =  (t)dt (3)
(t)dt (3)
Осуществляют функциональное преобразование кода синхронной частоты ϕs в код гармонического (синусного) сигнала.
Цифроаналоговым преобразованием формируют компенсирующий ток, величину которого определяют как произведение амплитуды действительного фазного тока на текущую выборку гармонической функции
iко = Is ˙sin ϕs = 2/3 Iинв˙sin ϕs (4)
Сравнивают мгновенные значения фазного и компенсирующего токов между собой и уравновешивают рассогласование, вращая по фазе компенсирующий ток и определяя код сдвига фазы ε ϕ.
Преобразуют код сдвига фазы ε ϕв код синуса и формируют действительное значение моментообразующей составляющей тока статора isxкак произведение действительной амплитуды тока статора Is на текущую выборку кода синуса сдвига фазы εϕ по отношению
isx = Is ˙sinε ϕ (5)
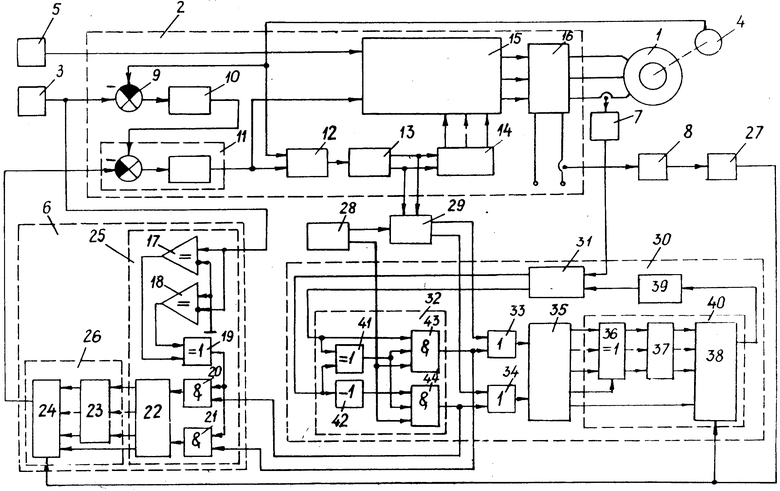
На чертеже представлена функциональная схема устройства для управления электроприводом, реализующего предложенный способ управления.
Устройство для управления электроприводом содержит асинхронный двигатель 1 с короткозамкнутым ротором, статорные обмотки которого подключены к фазным выходам блока 2 управления, выполненного с двумя задающими входами, входом главной обратной связи и входом обратной связи по моменту, задатчик 3 скорости, подключенный к первому задающему входу блока 2 управления, датчик 4 скорости, связанный с ротором асинхронного двигателя 1 и подключенный к входу главной обратной связи блока 2 управления, задатчик 5 потокообразующей составляющей тока статора, подключенный к второму задающему входу блока 2 управления, формирователь 6 текущего значения моментообразующей составляющей тока статора с двумя информационными входами, входом для опорного сигнала и входом управления, подключенный выходом к входу обратной связи по моменту блока 2 управления, и два датчика 7, 8 тока, первый из которых включен в один из фазных выходов блока 2 управления.
Блок 2 управления содержит элемент 9 сравнения, пропорционально-интегральный регулятор 10 скорости, подключенный входом к выходу элемента 9 сравнения, определитель 11 рассогласования (ПИ-регулятор) с задающим входом, подключенным к выходу пропорционально-интегрального регулятора 10 скорости, и входом обратной связи, подключенным к выходу формирователя 6 моментообразующей составляющей тока статора, сумматор 12 с двумя входами, подключенный выходом к входу преобразователя 13 "аналог - частота", адресный счетчик 14 с счетными входами, подключенными к выходам преобразователя 13 "аналог - частота", преобразователь 15 координат с управляющими входами для ортогональных составляющих тока статора и цифровым входом, подключенным к выходу адресного счетчика 14, и автономный инвертор 16, подключенный управляющими входами к выходам преобразователя 15 координат.
Выход определителя 11 рассогласования подключен к объединенным между собой входу для моментообразующей составляющей тока статора преобразователя 15 координат и первому входу сумматора 12.
Вход для потокообразующей составляющей тока статора преобразователя 15 координат и первый вход элемента 9 сравнения образуют соответственно первый и второй задающие входы блока 2 управления, вход главной обратной связи которого образован объединенными вторыми входами элемента 9 сравнения и сумматора 12. Фазные выходы автономного инвертора 16 образуют одноименные выходы блока 2 управления.
Блок 2 управления снабжен дополнительными выходами синхронной частоты, образованными выходами преобразователя 13 "аналог - частота".
Формирователь 6 моментообразующей составляющей тока статора снабжен двумя компараторами 17, 18 с прямыми и инверсными входами, логическим элементом ИСКЛЮЧАЮЩЕЕ ИЛИ 19, подключенным входами к выходам компараторов 17, 18, двумя логическими элементами 2И 20, 21, первые входы которых объединены и подключены к выходу логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, реверсивным счетчиком 22 с счетными входами, подключенными к выходам логических элементов 2И 20, 21, постоянным запоминающим блоком 23 с адресным входом, подключенным к выходу младших разрядов реверсивного счетчика 22, и перемножающим цифроаналоговым преобразователем 24 (ПЦАП) цифровым входом, младшие разряды которого подключены к выходу постоянного запоминающего блока 23, а старший разряд соединен со старшим разрядом реверсивного счетчика 22, и входом для опорного сигнала. Постоянный запоминающий блок 23 запрограммирован по закону синуса, изменяющегося от 0 до 90о. Прямой вход компаратора 18 и инверсный вход компаратора 17 соединены и подключены к общей шине.
Компараторы 17, 18, логический элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 19, логические элементы 2И 20, 21 и реверсивный счетчик 22 образуют, по существу, преобразователь 25 "частота-код", а постоянный запоминающий блок 23 и ПЦАП 24 - тригонометрический цифроаналоговый преобразователь 26 (ТЦАП).
Вторые входы логических элементов 2И 20, 21 образуют информационные входы формирователя 6 моментообразующей составляющей тока статора, вход управления которого образован объединенными инверсным и прямым входами компараторов 17, 18.
Вход для опорного сигнала ПЦАП 24 образует одноименный вход формирователя 6 моментообразующей составляющей тока статора, выход которого образован выходом ПЦАП 24.
В устройство для управления электроприводом введены масштабный элемент 27, двухтактный генератор 28 с двумя выходами, блок 29 синхронизации с двумя информационными входами, входом управления и двумя выходами и следящий аналого-цифровой преобразователь 30 фазы (АЦПФ) с входами для измеряемого и опорного сигналов, двумя входами для синхронной частоты и двумя выходами сигналов рассогласования фазы.
АЦПФ 30 снабжен блоком 31 сравнения с входами для измеряемого и компенсирующего сигналов, схемой 32 управления уравновешиванием с управляющими входами, подключенными к выходам блока 31 сравнения, и входом для тактовых импульсов, двумя логическими элементами 2ИЛИ 33 и 34, вторые входы которых подключены к выходам схемы 32 управления уравновешиванием, реверсивным счетчиком 35 со счетными входами, подключенными к выходам логических элементов 2ИЛИ 33, 34, блоком 36 инверторов аргумента с цифровым входом, подключенным к младшим разрядам реверсивного счетчика 35, и входом управления, подключенным к второму старшему разряду реверсивного счетчика 35, постоянным запоминающим блоком 37 с адресным входом, подключенным к выходу блока 36 инверторов аргумента, перемножающим цифроаналоговым преобразователем 38 с цифровым входом, младшие разряды которого подключены к выходу постоянного запоминающего блока 37, а старший разряд соединен со старшим разрядом реверсивного счетчика 35 и входом для опорного сигнала и апериодическим звеном 39 с входом, подключенным к выходу ПЦАП 38 и выходом, соединенным с входом для компенсирующего сигнала блока 31 сравнения.
Блок 36 инверторов аргумента, постоянный запоминающий блок 37 и ПЦАП 38 образуют четырехквадрантный тригонометрический цифроаналоговый преобразователь 40 (ТЦАП). Для сокращения емкости памяти постоянного запоминающего блока 37, запрограммированного по закону синуса, в ТЦАП 40 применено преобразование кодов реверсивного счетчика 35 только в пределах первого квадранта изменения синусоидальной функции, а саму функцию в остальных квадрантах получают из первого, инвертируя аргумент функции. Для реализации инверсии кода аргумента на адресном входе постоянного запоминающего блока 37 в ТЦАП 40 введен блок 36 инверторов аргумента. Управляемый инвертор одного разряда аргумента представляет собой двухвходовой логический элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, один из входов которого - сигнальный, а другой - управляющий.
Возможный вариант выполнения схемы 32 управления уравновешиванием содержит логический элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 41, логический элемент НЕ 42 и два логических элемента 3И 43, 44. Выход логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 41 подключен к объединенным вторым входам логических элементов 3И 43, 44. Выход логического элемента НЕ 42 подключен к первому входу логического элемента 3И 44. Объединенные первые входы логических элементов 41 и 43, а также вход логического элемента НЕ 42 образуют управляющие входы схемы 32 управления уравновешиванием. Объединенные третьи входы логических элементов 3И 43, 44 образуют вход для тактовых импульсов схемы 32 управления уравновешиванием, выходы которой образованы выходами логических элементов 3И 43, 44.
Вход для измеряемого сигнала АЦПФ 40 образован одноименным входом блока 31 сравнения и подключен к выходу первого датчика 7 тока. Входы для синхронной частоты АЦПФ 40 образованы первыми входами логических элементов 2ИЛИ 33, 34 и подключены к выходам блока 29 синхронизации. Вход для тактовой частоты АЦПФ 40 образован одноименным входом схемы 32 управления уравновешиванием и подключен к второму выходу двухтактного генератора 28. Выходы рассогласования фазы АЦПФ 40 образованы выходами схемы 32 управления уравновешиванием и подключены к информационным входам формирователя 6 моментообразующей составляющей тока статора, вход управления которого подключен к выходу задатчика 3 скорости.
Объединенные входы для опорного сигнала формирователя 6 моментообразующей составляющей тока статора и АЦПФ 40 подключены к выходу масштабного элемента 7, вход которого подключен к датчику 8 тока, включенному в силовую цепь питания автономного инвертора 16.
Дополнительные выходы синхронной частоты блока 2 управления подключены к информационным входам блока 29 синхронизации, вход управления которого подключен к первому выходу двухтактного генератора 28. Датчик 7 тока и введенные в электропривод второй датчик 8 тока, масштабный элемент 27 и аналого-цифровой преобразователь 30 фазы (АЦПФ) определяют действительные информационные параметры (амплитуду I3 и сдвиг фазы ε ϕмгновенного фазного тока статора. Используя эти параметры, формирователь 6 моментообразующий составляющей тока статора преобразует унитарный код сдвига фазы в параллельный код ε ϕ, преобразует этот код в код синусной функции и вычисляет действительное значение моментообразующей тока статора isx, величину которой определяют как произведение действительной амплитуды фазного тока статора на текущую выборку синусной функции, т.е. формируют сигнал isx = Is˙sinε ϕ, который используют в качестве сигнала локальной обратной связи при контроле моментообразующей составляющей тока статора. При этом действительную амплитуду фазного тока статора определяют за счет масштабирования величины сигнала датчика 8 тока, используя известное соотношение (2), связывающего величину амплитуды фазного тока симметричной трехфазной системы с током, потребляемым автономным инвертором 16. Сдвиг фазы ε ϕопределяют в процессе следящего уравновешивания мгновенного фазного тока статора is, контролируемого датчиком 7, компенсирующим сигналом, формируемым в АЦПФ 30. При нулевом (компенсационном) методе измерения гармонического сигнала обеспечивают равенство амплитуд, частот и фаз измеряемого и компенсирующего сигналов. Равенство амплитуд обеспечивают автоматически за счет восстановления действительной амплитуды фазного тока по соотношению (2), т.е. при формировании компенсирующего сигнала в АЦПФ используют амплитуду измеряемого сигнала.
Равенство частот измеряемого и компенсирующего сигналов обеспечивают за счет деления частоты преобразователя 13 "аналог-код" на адресном и реверсивном счетчиках 14, 35, выполненных с одинаковым числом разрядов.
При выполнении условий баланса амплитуд и частот измеряемого и компенсирующего сигналов определяют действительный сдвиг фазы ε ϕфазного тока статора, следующим образом.
Используя импульсы развертки синхронной частоты ωs* преобразователя 13 "аналог-код", формируют код фазы ϕs* синхронной частоты в реверсивном счетчике 35. При помощи тригонометрического цифроаналогового преобразователя 40 (ТЦАП) код фазы ϕs* синхронной частоты преобразуют в код гармонического (синусного) сигнала и формируют компенсирующий ток, величину которого определяют как произведение действительной амплитуды фазного тока статора, определенной по соотношению (2), на текущую выборку гармонической функции, т. е. получают компенсирующий сигнал по соотношению (4), который совпадает по фазе с требуемой моментообразующей составляющей тока статора. Сформированный сигнал сравнивают на блоке 31 сравнения с мгновенным значением фазного тока статора и, вращая компенсирующий сигнал по фазе, уравновешивают рассогласование. Количество импульсов, приведших к устранению разбаланса на входе блока 31 сравнения, характеризует изменение текущего сдвига фазы ε ϕмежду потокосцеплением ротора и током статора.
В АЦПФ 30 формируют компенсирующий гармонический ток, изменяемый синфазно с требуемой моментообразующей составляющей тока статора, вращают этот ток по фазе до его совпадения с фазой действительного фазного тока статора и одновременно определяют в унитарном коде рассогласования по фазе между этими сигналами. Компенсирующий сигнал на выходе ТЦАП 40
ik = 2/3Iинв ˙sin( ϕst + ε ϕ) (6)
АЦПФ 30 работает следующим образом.
Импульсы развертки синхронной частоты ωs* с выхода преобразователя 13 "аналог-код" поступают на информационные входы блока 29 синхронизации, который осуществляет привязку этих импульсов к высокочастотным импульсам двухтактного генератора 28. Сформированные блоком 29 синхронизации выходные импульсы через логические элементы 2ИЛИ 33, 34 поступают на суммирующий или вычитающий счетный вход реверсивного счетчика 35. Прохождение этих импульсов через логические элементы 33, 34 определяется направлением вращения двигателя.
Реверсивный счетчик 35 формирует код фазы ϕs синхронной частоты.
Преобразование кода фазы ϕs синхронной частоты в синусоидальную функцию осуществляется постоянным запоминающим блоком 37 и перемножающим цифроаналоговым преобразователем 38. Четырехквадрантное умножение сигналов производится путем инвертирования кода, записанного в реверсивном счетчике 35, и переключения знака выходного сигнала ПЦАП 38 по сигналам с выходов второго и первого старших разрядов реверсивного счетчика 35. При наличии на управляющем входе блока 36 инверторов аргумента сигнала логической единицы код на его выходе - прямой, логического нуля - инверсный по отношению к входному сигналу.
Таким образом, одновременно с формированием управляющего напряжения задания мгновенных фазных токов, с помощью импульсов развертки синхронной частоты в ТЦАП 40 формируется компенсирующий сигнал, изменяющийся синфазно с требуемой моментообразующей составляющей тока статора.
Сформированный компенсирующий сигнал с выхода ТЦАП 40 поступает на вход блока 31 сравнения через апериодическое звено 39, имеющее единичный коэффициент передачи. Апериодическое звено 39 выравнивает быстродействие АЦПФ 30 и блока 2 управления по каналу передачи задающих воздействий синхронной частоты.
Блок 31 сравнения контролируют равенство (или неравенство) измеряемого сигнала isx установленному значению сигнала на выходе апериодического звена 39, сформированному ТЦАП 40 на уровне значения соответствующей выборки синусоидальной функции, определяемой постоянным запоминающим блоком 37 по коду фазы, формируемому реверсивным счетчиком 35.
Если текущее значение компенсирующего сигнала равняется измеряемому сигналу, то на первом выходе блока 31 сравнения будет установлен нулевой сигнал, а на втором - единичный сигнал.
Выходные сигналы блока 31 сравнения анализируются в схеме 32 управления уравновешиванием. При указанных выше уровнях выходных сигналов импульсы тактовой частоты на выходах схемы 23 управления уравновешиванием будут отсутствовать, так как на вторых входах логических элементов 3ИЛИ 43, 44 будет присутствовать нулевой сигнал с выхода логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 41 (сигнал отсутствия рассогласования).
Если текущее значение измеряемого сигнала превысило компенсирующий сигнал, то на втором выходе блока 31 сравнения единичный сигнал изменится на нулевой. На выходе логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 41 появится единичный сигнал наличия рассогласования. По этому сигналу и единичному сигналу с выхода элемента НЕ 42 тактовые импульсы, постоянно присутствующие на входе логического элемента 3И 44, начинают проходить через логический элемент 2ИЛИ 34 на суммирующий счетный вход реверсивного счетчика 35, изменяя тем самым компенсирующий сигнал, формируемый ТЦАП 40. При компенсации рассогласования уровень сигнала на втором выходе блока 31 сравнения изменится на единичный, запрещая прохождение импульсов тактовой частоты с выхода элемента 3И 44 на вход реверсивного счетчика 35.
Если текущее значение измеряемого сигнала оказалось меньше компенсирующего сигнала, формируемого ТЦАП 40, то выходные сигналы блока 31 сравнения станут единичными. Логический элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 41 также сформирует единичный сигнал наличия рассогласования, но в этом случае в реверсивный счетчик 35 по вычитающему входу начнут проходить счетные импульсы тактовой частоты с выхода логического элемента 2ИЛИ 33.
При уравновешивании измеряемого сигнала компенсирующим сигналом на первом выходе блока 31 сравнения появится нулевой сигнал, который запретит прохождение импульсов тактовой частоты на вход реверсивного счетчика 35.
Таким образом, уравновешивание мгновенного значения фазного тока статора осуществляется вращением компенсирующего сигнала по фазе тактовыми импульсами генератора 28, при этом количество тактовых импульсов, уравновешивающих рассогласование между измеряемым и компенсирующим сигналами, определяет изменение текущего фазового сдвига ε ϕ.
Устройство для управления электроприводом работает следующим образом.
На выходах задатчика 3 скорости и задатчика 5 потокообразующей составляющей тока статора формируются соответственно напряжение задания скорости U ωи напряжение задания потокообразующей составляющей тока статора Uisy. При U ω= 0 и отсутствии сигнала на выходе датчика 4 скорости напряжение на выходе элемента 9 сравнения и на выходе пи-регулятора 10 скорости равны нулю
(U ω= 0, Uisx* = 0).
В начальном состоянии устройства для управления электроприводом напряжение на выходе формирователя 6 текущего значения моментообразующей составляющей тока статора отсутствует (Uisx = 0), напряжение на выходе определителя 11 рассогласования также равно нулю. Ввиду отсутствия сигналов на всех входах сумматора 12 сигнал на его выходе равен нулю (U ωs = 0).
На управляющих входах для ортогональных составляющих тока статора преобразователя 15 координат отличное от нуля напряжение присутствует только на управляющем входе для потокообразующей составляющей тока статора Uisy.
Преобразователь 15 координат формирует начальные постоянные напряжения задания фазных токов статора Uisao, Uisbo, Uisco, отрабатываемых автономным инвертором 16. В результате этого автономный инвертор 16 формирует постоянные выходные токи в фазных выходах isao, isbo, isco, создающие начальный магнитный поток в воздушном зазоре Ψrасинхронного двигателя 1.
Постоянный фазный ток образуется вследствие того, что произвольная начальная фаза тока статора ϕso, установленная в адресном счетчике 14, не переключается ввиду отсутствия напряжения U ωs на входе преобразователя 13 "аналог-частота". В фазных обмотках статора асинхронного двигателя 1 устанавливаются постоянные фазные токи isao, isbo, isco, соответствующие неподвижному состоянию вектора тока статора Ψro, при этом модуль вектора тока статора равен начальной потокообразующей составляющей тока статора  = isyo, а автономный инвертор 16 потребляет от источника питания ток, определяемый отношением (2).
= isyo, а автономный инвертор 16 потребляет от источника питания ток, определяемый отношением (2).
Так как векторы тока статора Iso и потокосцепления ротора  неподвижны и совпадают по направлению, сдвиг фазы между ними равен нулю ( εs = 0), начальный момент равен нулю (М = 0), скорость вращения ротора равна нулю ( ω= 0), напряжение на выходе датчика 4 скорости отсутствует.
неподвижны и совпадают по направлению, сдвиг фазы между ними равен нулю ( εs = 0), начальный момент равен нулю (М = 0), скорость вращения ротора равна нулю ( ω= 0), напряжение на выходе датчика 4 скорости отсутствует.
Сигнал, пропорциональный одному из начальных фазных токов (например, фазы А), с выхода датчика 7 (Uisao) поступает на вход для измеряемого сигнала блока 31 сравнения АЦПФ 30, на вход для опорного сигнала которого с выхода датчика 8 тока через масштабный элемент 27 поступает сигнал, пропорциональный току, потребляемому автономным инвертором 16 (Uiso). Этот сигнал уравновешивается компенсирующим сигналом, формируемым ТЦАП 40.
В результате обработки рассогласования, вызванного начальным фазным током isao в реверсивном счетчике 35 устанавливается начальная фаза тока статора ϕso.
В начальном состоянии устройства для управления электроприводом сигнал на входе компараторов 17, 18 отсутствует, поэтому на выходах компараторов, сравнивающих входной сигнал с нулевым уровнем устанавливается выходное напряжение, соответствующее уровню логического нуля (на выходе компаратора 17) и уровню логической единице (на выходе компаратора 18). В результате этого на выходе логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 19 устанавливается сигнал логического нуля, запрещающий прохождение сигналов отработки начального рассогласования от АЦПФ 30 через логические элементы 2И 20, 21 на вход реверсивного счетчика 22. В результате этого напряжение на выходе формирователя 6 текущего значения моментообра- зующей составляющей тока статора не изменяет своего начального нулевого значения Uisx = 0.
При подключении к входу элемента 9 сравнения напряжения задания скорости вращения U ωна выходе пи-регулятора 10 скорости, а следовательно, и на выходе определителя 11 рассогласования образует скачок напряжения Uisx, пропорциональный требуемому моменту.
При отсутствии измеренной скорости вращения (U ω= 0) напряжение на входе преобразователя 13 "аналог-частота" равно напряжению задания управляемой составляющей синхронной частоты U Δωs=U ωs (абсолютному скольжению ротора). В первый момент времени адресный счетчик 14 определяет начальную фазу синусных и косинусных функций преобразователя 15 координат ϕso, так как фаза дискретно изменяется на одну дискрету лишь после прихода импульса развертки напряжения U ωs через интервал времени Δti, равный
Δti = 2π /Kf ˙ U ωsi, (7) где Kf - коэффициент передачи по частоте преобразователя 13 "аналог-частота";
U ωsi - входное напряжение преобразователя "аналог-частота" на i- - интервале времени.
С помощью преобразователя 15 координат формируются четыре напряжения, величина которых определяется произведением напряжения на управляющих входах для ортогональных составляющих тока статора Uisx, Uisy на начальные выборки синусной и косинусной функции sinϕso, cos ϕso. Путем попарного суммирования этих напряжений производится формирование двухфазного гармонического напряжения U isα,U isβсогласно известному преобразованию декартовых координат из вращающейся системы координат Х, Y (с синхронной скоростью ωs) в неподвижную систему координат α,β(ориентированную относительно неподвижной оси фазы А статора):




 (8) и последующее преобразование этих сигналов U isα,U isβв трехфазное напряжение задания мгновенных фазных токов статора:
(8) и последующее преобразование этих сигналов U isα,U isβв трехфазное напряжение задания мгновенных фазных токов статора:

 (9)
(9)
Управляющее трехфазное напряжение задания мгновенных фазных токов Uisa, Uisb, Uisc с выходов преобразователя 15 координат поступает на управляющие входы автономного инвертора 16 и отрабатывается при помощи внутренних контуров регулирования мгновенного фазного тока статора. Автономный инвертор 16 отрабатывает скачок фазы тока статора εs, образующийся при подаче напряжения задания скорости U ω.
εs= ϕ so+ε ϕ , (10) где вторая составляющая определяет сдвиг фазы вектора тока статора
ε ϕ= arctg isx/isy (11)
В результате скачка фазы тока статора ε ϕпреобразуется импульс момента Мимп = М* асинхронного двигателя 1. Поддержание момента М = М* на уровне первоначального импульса момента обеспечивается тем, что через малый промежуток времени Δt, определяемый согласно (7) разрядностью кода адресного счетчика 14, происходит переключение дискретных выборок синусной и косинусной функций преобразователя 15 координат. Начальная синхронная фаза ϕsо получает приращение в положительном или отрицательном направлении, что определяется положительной или отрицательной полярностью напряжения Uωs
ϕs= ϕ so+K Δ ϕs-j Δ ϕs, (12) где K, j - количество дискрет соответственно положительного или отрицательного направления.
В результате указанного изменения синхронной фазы ϕs образуется частота потокосцепления ротора
ωs=Δ ϕs/Δ t, (13) которая возникает в связи с изменением мгновенных токов с частотой ωs, синхронной с частотой потокосцепления ротора.
Синхронное вращение вектора тока статора и потокосцепления ротора с частотой ωs= Δ ωsпосле скачка фазы тока статора ε ϕ, определяемого условием (11), обеспечивает поддержание угла между векторами тока статора is и потокосцепления ротора  на уровне ε ϕ(М*), определяемом требуемым моментом М*, в результате чего выполняется условие поддержания текущего момента двигателя М, равного требуемому моменту М*, возникает ускорение ротора, скорость асинхронного двигателя 1 возрастает, напряжение с выхода датчика 4 скорости поступает на вход элемента 9 сравнения и на вход сумматора 12. В результате этого образуется положительная обратная связь по скорости вращения для формирования синхронной частоты ωs=ω+Δ ωs и для обеспечения синхронного вращения векторов тока статора и потокосцепления ротора, а также для формирования компенсирующего сигнала в АЦПФ 30
на уровне ε ϕ(М*), определяемом требуемым моментом М*, в результате чего выполняется условие поддержания текущего момента двигателя М, равного требуемому моменту М*, возникает ускорение ротора, скорость асинхронного двигателя 1 возрастает, напряжение с выхода датчика 4 скорости поступает на вход элемента 9 сравнения и на вход сумматора 12. В результате этого образуется положительная обратная связь по скорости вращения для формирования синхронной частоты ωs=ω+Δ ωs и для обеспечения синхронного вращения векторов тока статора и потокосцепления ротора, а также для формирования компенсирующего сигнала в АЦПФ 30
U ωs=U ω+U Δωs (14)
При подключении к входу элемента 9 сравнения напряжения задания скорости вращения U ω * срабатывает один из компараторов 17, 18. В зависимости от знака напряжения U ω * на обоих входах логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 19 образуются сигналы логической единицы или сигналы логического нуля, а не его выходе - сигнал логической единицы, который разрешает прохождение сигналов с выхода АЦПФ 30 на счетные входы реверсивного счетчика 22.
Одновременно в результате скачка амплитуды и фазы мгновенных фазных токов, определяемых соответственно соотношениями 8, 9 и 11, изменяются выходные сигналы датчиков 7, 8 тока. Выходной сигнал датчика 8 тока уравновешивается компенсирующим сигналом ТЦАП 40 в АЦПФ 30, уравновешивание измеряемого сигнала (мгновенного тока фазы А) производится путем переключения кодов счетчика 35 с помощью тактовых импульсов двухтактного генератора 28, блока 31 сравнения и схемы 32 управления уравновешиванием, при этом импульсы с выхода схемы 32 управления уравновешиванием поступают также на суммирующий или вычитающий счетный вход реверсивно- го счетчика 22 формирователя 6 текущего значения моментообразующей составляющей тока статора.
С помощью постоянного запоминающего блока 23 и ПЦАП 24 код реверсивного счетчика 22 преобразуется в текущее значение моментообразующей составляющей тока статора, величина которого определяется произведением аналогового сигнала с выхода масштабного элемента 27 (сигнал текущего значения амплитуды фазного тока) на выборку синусной функции, определяемой постоянным запоминающим блоком 23 по текущему коду фазового сдвига тока статора ε ϕ. После завершения процесса уравновешивания мгновенного фазного тока, вызванного скачкообразным изменением управляющего напряжения задания фазных токов, в реверсивном счетчике 22 будет записан код фазового сдвига ε ϕ, определяемый соотношением 11, а на выходе формирователя 6 мгновенного значения моментообразующей составляющей тока статора будет сформирован сигнал is, определяемый соотношением 5.
Сформированный сигнал текущего значения моментообразующей составляющей тока статора сравнивается с требуемым значением, определяемым пи-регулятором 10 скорости, на определителе 11 рассогласования. При расчетных параметрах замкнутого контура регулирования фазного тока, текущее значение моментообразующей составляющей тока статора равняется требуемому значению, определяемому пи-регулятором 10 скорости, и сигнал рассогласования на выходе определителя 11 рассогласования будет равен требуемому напряжению U Δωs*.
Управляющее напряжение U ωs, равное сумме сигналов абсолютного скольжения ротора и измеренной скорости, преобразуется преобразователем 13 "аналог-частота" в импульсы развертки синхронной частоты, обеспечивающие поддержание угла сдвига фаз ε ϕмежду векторами тока статора is и потокосцепления ротора  , на уровне, определяемом требуемым моментом М*.
, на уровне, определяемом требуемым моментом М*.
Таким образом, при подключении к входу элемента 9 сравнения напряжения задания скорости вращения U ω* образуется момент двигателя, скорость ротора возрастает, возрастает выходное напряжение датчика 4 скорости, которое уменьшает напряжение пи-регулятора 10 скорости до установления требуемого момента М*, соответствующему моменту нагрузки Мнагр на валу асинхронного двигателя 1 при заданной скорости вращения.
Изменение параметров замкнутого контура регулирования фазного тока автономного инвертора 16, например изменение электромагнитной постоянной времени ротора, приводит к появлению рассогласования между входными сигналами блока 31 сравнения. Фазовое рассогласование этих сигналов изменяет величину моментообразующей составляющей тока статора. В результате этого напряжение на выходе определителя 11 рассогласования изменяется. Изменение напряжения синхронной частоты U ωs приведет к появлению дополнительного скольжения ротора асинхронного двигателя при неизменном сигнале на выходе пи-регулятора 10 скорости.
Таким образом, сформированный сигнал дополнительного скольжения ротора изменяет синхронную частоту тока статора, благодаря чему компенсируются параметрические возмущения в контуре регулирования тока статора (температурные изменения приведенного сопротивления ротора, изменения индуктивности при изменении намагничивания магнитной цепи двигателя и т.д.) путем изменения абсолютного скольжения. Это позволяет обеспечить инвариантное и оптимальное управление моментом асинхронного двигателя во всем требуемом диапазоне изменения момента и скорости вращения.
Выполнение АЦПФ 30 и формирователя 6 текущего значения моментообразующей составляющей тока статора на средствах цифровой техники позволяет получить стабильный сигнал управления синхронной частотой тока статора, а следовательно, и высокую точность управления электроприводом.
Изобретение позволяет существенно повысить динамические и энергетические характеристики электропривода и может быть использовано в электроприводе с регулированием потокообразующей составляющей тока статора.
Использование: в приводах станков, промышленных роботов и следящих систем различного назначения. По предлагаемому способу управления электроприводом по величине тока инвертора восстанавливают действительное значение амплитуды фазного тока, на основе которого формируют компенсирующий ток с учетом фазы синхронной теплоты, вращая фазу которого компенсируют рассогласование между указанными токами. Обратную связь при контроле моментообразующей осуществляют по составляющей тока, значение которого определяется величинами действительной амплитуды фазного тока, свдигая фазы тока. 2 с.п. ф-лы, 1 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1987 |
|
SU1436263A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
