Изобретение относится к электротехнике, а именно к частотно-управляемым электро- приводам на базе асинхронных короткозам- кнутых двигателей, и может быть использовано для регулирования скорости и момента на валу двигателя с высокой точностью.
Целью изобретения является повышение точности управления электроприводом.
На фиг. 1 представлена функциональная схема частотно-управляемого асинхронного электропривода; на фиг. 2 - схема блока синхронизации.
Частотно-управляемый асинхронный электропривод содержит асинхронный корот- козамкнутый двигатель 1 к обмоткам статора которого подключены фазные выходы регулируемого источника тока 2, последовательно соединенные формирователь 3 гармонических сигналов частоты статора и блок преобразования координат 4, снабженный четырьмя умножителями 5-8, выполненными в виде цифроаналоговых преобразователей, и сумматорами 9-12, и подключенный выходами к управляющим входам регулируемого источника тока 2,за- датчик 13 реактивной составляющей тока статора, связанный выходом с одноименным управляющим входом блока преобразования координат 4, частотно-импульсный датчик углового положения 14, установленный на валу двигателя 1, формирователь 15 частоты импульсов датчика 14, снабженный выходами для формирования частоты и знака частоты, подключенными к соответствующим входам преобразователя частота-напряжение 16, регулятор скорости 17 с узлом сравнения-18, подключенным входами к выходам задатчика скорости 19 и преобразователя
15
и к второй паре выходов генератора 23. Выход nepijoro блока синхронизации 24 подключен к объединенным первым входам первого и второго логических элементов И 28 и 29. Выход нуль-органа 20 подключен к второму входу первого логического элемента И 28, а через первый логический элемент НЕ 26 - к второму входу второго логического элемента И 29. Выход второго блока синхронизации 25 подключен
10 к объединенным первым входам третьего и четвертого логических элементов И 30 и 31. Выход для формирования знака частоты формирователя 15 подключен к второму входу третьего логического элемента И 30, а через второй логический элемент НЕ 27 - к второму входу четвертого логического элемента И 31.
Выходы первого и третьего логических элементов И 28 и 30 подключены к входам первого логического элемента ИЛИ 32,
20 а выходы второго и -.четвертого логических элементов И 29 и 31 - к входам второго логического элемента ИЛИ 33, выход которого и выход первого логического элемента ИЛИ 32 соединены соответственно с вычитающим и суммирующим входами реверсивного счетчика 34, связанного выходом с объединенными входами постоянных запоминающих блоков 35 и 36, выход первого из которых подк.тючен к объединенным цифровым входам первого и третьего цифроаналоговых преобразователей 5 и 7. Выход второго постоянного запоминающего блока 36 подключен к объединенным цифровым входам второго и четвертого цифро- аналоговых преобразователей 6 и 8. Аналоговые входы первого и второго цифроана25
30
частота-напряжение 16. При этом выход регу- ,, логовых преобразователей 5 и 6 объединены
лятора скорости 17 соединен с объединенными входами нуль-органа 20 и блока выделения модуля 21, а выход нуль-органа 20 подключен к входу преобразователя напряжение-частота 22, связанного выходом с опорными входами блока преобразования координат 4.
Формирователь 3 гармонических сигналов частоты статора снабжен генератором тактовых импульсов 23 с двумя парами выходов, первым 24 и вторым 25 блоками синхронизации, двумя логическими элементами НЕ 26 и 27, четырьмя логическими элементами И 28-31, двумя логическими элементами ИЛИ 32 и 33, реверсивным счетчиком 34 и первым 35 и вторым 36 постоянными запоминающими блоками, запрограммированными соответственно по закону синуса и косинуса.
Входы первого блока синхронизации 24 подключены к выходу преобразователя напряжение-частота 22 и к первой паре выходов генератора тактовых импульсов 23. Входы второго блока синхронизации 25 подключены к выходу для формирования частоты формирователя частоты импульсов 15
45
и подключены к выходу регулятора скорости 17. Аналоговые входы третьего и четвертого цифроаналоговых преобразователей 7 и 8 объединены и подключены к выходу задатчика 13 реактивной составляющей 40 тока статора.
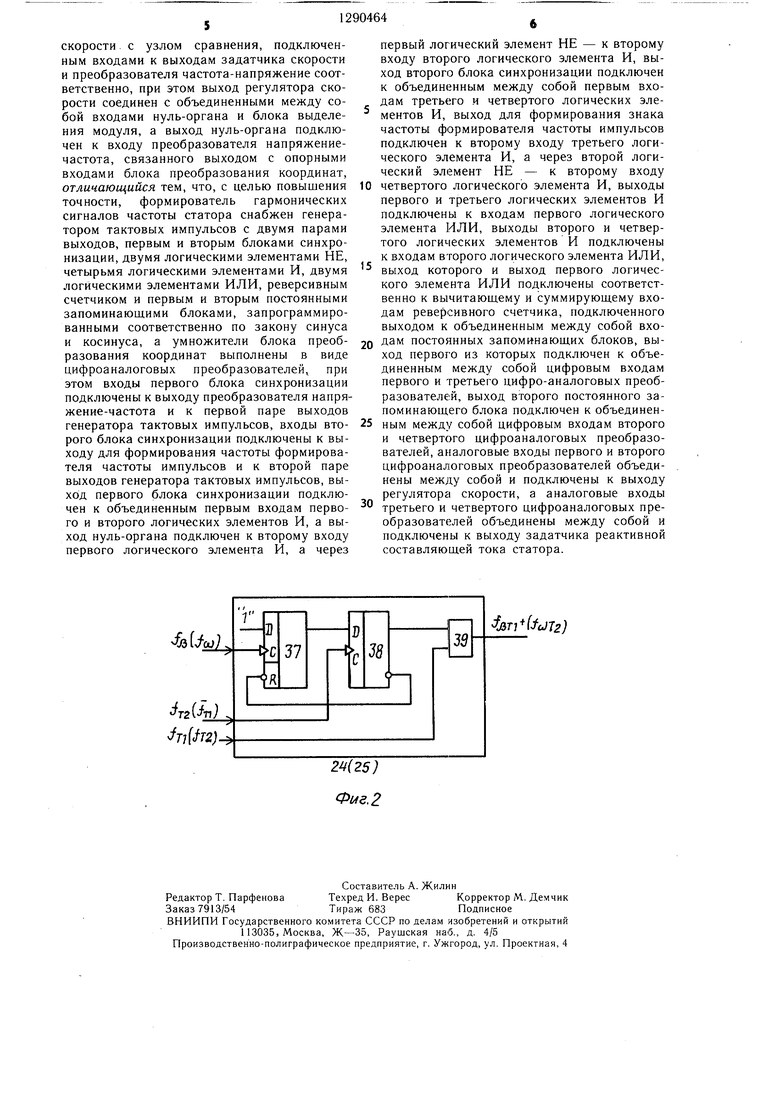
Каждый из блоков синхронизации 24 и 25 содержит триггеры 37 и 38 и логический элемент И 39 (фиг. 2).
Частотно-управляемый асинхронный электропривод работает следующим образом.
Заданное значение скорости вращения асинхронного короткозамкнутого двигателя 1, поступающее с выхода задатчика скорости 19, сравнивается с действительным значением скорости с помощью узла сравнения 5Q 18. Полученный сигнал рассогласования поступает на вход регулятора скорости 17, выходной сигнал которого определяет активную составляющую тока статора во вращающейся ортогональной системе координат X, у, ориентированной осью х по вектору 55 потока ротора Ч 2 Ч 2Х.
С помощью блока выделения модуля 21 определяется модуль выходного сигнала регулятора скорости 17, который через преоб
и к второй паре выходов генератора 23. Выход nepijoro блока синхронизации 24 подключен к объединенным первым входам первого и второго логических элементов И 28 и 29. Выход нуль-органа 20 подключен к второму входу первого логического элемента И 28, а через первый логический элемент НЕ 26 - к второму входу второго логического элемента И 29. Выход второго блока синхронизации 25 подключен
к объединенным первым входам третьего и четвертого логических элементов И 30 и 31. Выход для формирования знака частоты формирователя 15 подключен к второму входу третьего логического элемента И 30, а через второй логический элемент НЕ 27 - к второму входу четвертого логического элемента И 31.
Выходы первого и третьего логических элементов И 28 и 30 подключены к входам первого логического элемента ИЛИ 32,
а выходы второго и -.четвертого логических элементов И 29 и 31 - к входам второго логического элемента ИЛИ 33, выход которого и выход первого логического элемента ИЛИ 32 соединены соответственно с вычитающим и суммирующим входами реверсивного счетчика 34, связанного выходом с объединенными входами постоянных запоминающих блоков 35 и 36, выход первого из которых подк.тючен к объединенным цифровым входам первого и третьего цифроаналоговых преобразователей 5 и 7. Выход второго постоянного запоминающего блока 36 подключен к объединенным цифровым входам второго и четвертого цифро- аналоговых преобразователей 6 и 8. Аналоговые входы первого и второго цифроана
логовых преобразователей 5 и 6 объединены
5
и подключены к выходу регулятора скорости 17. Аналоговые входы третьего и четвертого цифроаналоговых преобразователей 7 и 8 объединены и подключены к выходу задатчика 13 реактивной составляющей 0 тока статора.
Каждый из блоков синхронизации 24 и 25 содержит триггеры 37 и 38 и логический элемент И 39 (фиг. 2).
Частотно-управляемый асинхронный электропривод работает следующим образом.
Заданное значение скорости вращения асинхронного короткозамкнутого двигателя 1, поступающее с выхода задатчика скорости 19, сравнивается с действительным значением скорости с помощью узла сравнения Q 18. Полученный сигнал рассогласования поступает на вход регулятора скорости 17, выходной сигнал которого определяет активную составляющую тока статора во вращающейся ортогональной системе координат X, у, ориентированной осью х по вектору 5 потока ротора Ч 2 Ч 2Х.
С помощью блока выделения модуля 21 определяется модуль выходного сигнала регулятора скорости 17, который через преобразователь напряжение-частота 22 определяет скорость вращения системы координат X, у относительно ротора. Знак этой скорости определяется с помощью нуль-органа 20.
Частота следования импульсов f на выходе преобразователя напряжение-частота 22 равна
fB Z
f,
2F
где Z - количество импульсов на один оборот вала двигателя 1; ю,н 314 рад/с - номинальная круговая
частота питающей сети. Импульсы от- датчика 14 с помощью формирователя 15 частоты импульсов умножаются на число, равое количеству пар полюсов р двигателя I. Частота следования импульсов fco на выходе формирователя 15 равна
f
Р
где W - частота вращения ратора.
Импульсы частот f ц, и f привязываются к несовпадающим высокочастотным тактовым импульсам ft, т2 и (т|, т2, поступающим с выходов генератора тактовых импульсов 23, с помощью блоков синхронизации 24 и 25. Указанные импульсы через логические элементы И 28-31 поступают на входы логических элементов ИЛИ 32 и 33.
Прохождение сигналов через логические элементы И 28 и 29 определяется-сигналом нуль-органа 20, задающим знак частоты импульсов fp, а через логические элементы И 30 и 31 - сигналом знака частоты поступающим от формирователя 15 частоты импульсов. Знак Гщ определяется направлением вращения двигателя 1. Выходы логических элементов ИЛИ 32 и 33 подключены соответственно к суммирующему и вычитающему входам реверсивного счетчика 34. Суммарная частота f импульсфв, поступающих на входы счетчка 34, равна
Если, объем реверсивного счетчика 34 выбрать равным z, то частота повторения кода Ng на выходе счетчика будет равна
f,- 2-Г2зг ifT
и характеризует скорость рращения «г; 2я1 | системы координат х, у относительно статора двигателя 1.
На выходе реверсивного счетчика 34 образуется информация в виде кода Ng, которая характеризует угол . поворота системы координат х, у относительно статора. Код Ng преобразуется с помощью запрограммированных по гармоническому закону постоянных запоминающих блоков
0
5
0
5
35 и 36 в коды sinNe и cosNg, которые подаются соответственно на цифровые входы умножающих цифроаналоговых преобразователей 5, 7 и 6, 8. На опорные аналоговые входы цифроаналоговых преобразователей 5 и 6 с выхода регулятора скорости 17 поступает сигнал задания iiy активной составляющей тока статора, а на опорные аналоговые входы цифроаналоговых преобразователей 7 и 8 - сигнал с выхода за- датчика 13 реактивной составляющей тока iix статора. Сигнал MX определяет поток ротора Ч 2, а сигнал in - момент на валу двигателя 1.
С помощью цифроаналоговых преобразователей 5-8 сигналы i|x, in- преобразуются в сигналы задания токов i|a, ii в неподвижной системе координат а, р (на выходах сумматоров 9 и 10), а затем в гармонические сигналы задания токов в фазах статора IA.B.C (на выходах сумматоров 9, 11 и 12), которые поступают на управляющие входы регулируемого источника тока 2.
Формирование гармонических сигналов задания токов с помощью цифровых элементов позволяет обеспечить их высокую точность и стабильность, а следовательно и высокую точность управления электроприводом.
Таким образом, предлагаемый электропривод, позволяет получить стабильные гармонические сигналы задания токов в фазах статора, регулировать в широких пределах и с высокой точностью амплитуду и частоту этих сигналов, благодаря чему повышается точность регулирования тока статора и момента асинхронного короткозамкнутого двигателя по сравнению с известным решением.
35
Формула изобретения
Частотно-управляемый асинхронный электропривод, содержащий асинхронный ко- роткозамкнутый двигатель, к обмоткам статора которого подключены фазные выходы регулируемого источника тока, последовательно соединенные формирователь гармонических сигналов частоты статора и блок преобразования координат, снабженный четырьмя умножителями, сумматорами и подключенный выходами к управляющим входам регулируемого источника тока, задатчик реактивной составляющей тока статора, связанный выходом с одноименным управляющим входом блока преобразования координат, частотно-импульсный датчик углового положения, установленный на валу асинхронного короткозамкнутого двигателя, формирователь частоты импульсов частотно-импульсного датчика углового положения, снабженный выходами для формирования частоты и знака частоты, подключенными к соответствующим входам преобразователя частота-напряжение, регулятор
скорости с узлом сравнения, подключенным входами к выходам задатчика скорости и преобразователя частота-напряжение соответственно, при этом выход регулятора скорости соединен с объединенными между собой входами нуль-органа и блока выделения модуля, а выход нуль-органа подключен к входу преобразователя напряжение- частота, связанного выходом с опорными входами блока преобразования координат,
первый логический элемент НЕ - к второму входу второго логического элемента И, выход второго блока синхронизации подключен к объединенным между собой первым входам третьего и четвертого логических элементов И, выход для формирования знака частоты формирователя частоты импульсов подключен к второму входу третьего логического элемента И, а через второй логический элемент НЕ - к второму входу
отличающийся тем, что, с целью повышения 10 четвертого логического элемента И, выходы точности, формирователь гармонических сигналов частоты статора снабжен генератором тактовых импульсов с двумя парами выходов, первым и вторым блоками синхронизации, двумя логическими элементами НЕ, четырьмя логическими элементами И, двумя логическими элементами ИЛИ, реверсивным счетчиком и первым и вторым постоянными запоминающими блоками, запрограммированными соответственно по закону синуса
)5
первого и третьего логических элементов И подключены к входам первого логического элемента ИЛИ, выходы второго и четвертого логических элементов И подключены к входам второго логического элемента ИЛИ, выход которого и выход первого логического элемента ИЛИ подключены соответственно к вычитающему и суммирующему входам реверсивного счетчика, подключенного выходом к объединенным между собой вхои косинуса, а умножители блока преоб- 2о постоянных запоминающих блоков, выход первого из которых подключен к объединенным между собой цифровым входам первого и третьего цифро-аналоговых преобразователей, выход второго постоянного запоминающего блока подключен к объединенным между собой цифровым входам второго и четвертого цифроаналоговых преобразователей, аналоговые входы первого и второго цифроаналоговых преобразователей объединены между собой и подключены к выходу регулятора скорости, а аналоговые входы третьего и четвертого цифроаналоговых преобразователей объединены между собой и подключены к выходу задатчика реактивной составляющей тока статора.
разования координат выполнены в виде цифроаналоговых преобразователей при этом входы первого блока синхронизации подключены к выходу преобразователя напряжение-частота и к первой паре выходов генератора тактовых импульсов, входы второго блока синхронизации подключены к выходу для формирования частоты формирователя частоты импульсов и к второй паре выходов генератора тактовых импульсов, выход первого блока синхронизации подключен к объединенным первым входам первого и второго логических элементов И, а выход нуль-органа подключен к второму входу первого логического элемента И, а через
первый логический элемент НЕ - к второму входу второго логического элемента И, выход второго блока синхронизации подключен к объединенным между собой первым входам третьего и четвертого логических элементов И, выход для формирования знака частоты формирователя частоты импульсов подключен к второму входу третьего логического элемента И, а через второй логический элемент НЕ - к второму входу
четвертого логического элемента И, выходы
первого и третьего логических элементов И подключены к входам первого логического элемента ИЛИ, выходы второго и четвертого логических элементов И подключены к входам второго логического элемента ИЛИ, выход которого и выход первого логического элемента ИЛИ подключены соответственно к вычитающему и суммирующему входам реверсивного счетчика, подключенного выходом к объединенным между собой вхо постоянных запоминающих блоков, вы
ход первого из которых подключен к объединенным между собой цифровым входам первого и третьего цифро-аналоговых преобразователей, выход второго постоянного запоминающего блока подключен к объединенным между собой цифровым входам второго и четвертого цифроаналоговых преобразователей, аналоговые входы первого и второго цифроаналоговых преобразователей объединены между собой и подключены к выходу регулятора скорости, а аналоговые входы третьего и четвертого цифроаналоговых преобразователей объединены между собой и подключены к выходу задатчика реактивной составляющей тока статора.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085018C1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1112521A1 |
| Электропривод переменного тока | 1986 |
|
SU1334342A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах на базе асинхронных короткозам- кнутых двигателей. Цель изобретения - повышение точности управления электроприводом. Заданное значение скорости вращения асинхронного короткозамкнутого двигателя (АКД) 1, поступающее с выхода за- датчика скорости 19, сравнивается с действительным значением скорости с помощью узла сравнения 18. Сигнал рассогласования поступает на вход регулятора скорости (PC) 17. Блок выделения модуля 21 определяет модуль выходного сигнала PC 17, который определяет через преобразователь напряжение-частота 22 скорость вращения системы координат относительно ротора. Знак этой скорости определяется с помощью нуль-органа 20. Импульсы частотно-импульсного датчика углового положения 14 и формирователя частоты (ФЧ) 15 умножаются на число, равное количеству пар полюсов АКД 1. Выполнение формирователя 3 гармонических сигналов частоты статора с помощью цифровых элементов: блоков синхронизации 24 и 25, генератора тактовых импульсов 23, реверсивного счетчика 34, логических элементов И, НЕ, ИЛИ 26-33, постоянных запоминающих блоков 35 и 36, запрограммированных по закону синуса и косинуса, а также выполнение умножителей блока преобразования координат в виде цифроаналоговых преобразователей 6 и 8 позволяет получить стабильные гармонические сигналы задания токов в фазах статора, регулировать в щироких пределах и с высокой точностью амплитуду и частоту этих сигналов, благодаря чему повышается точность регулирования тока статора и момента АКД 1. 1 ил. ш (Л 1С ;о о 4: О5 Фиг.1 if
| Эпштейн И | |||
| И | |||
| Автоматизированный электропривод переменного тока | |||
| М., Энергоиздат, 1982, с | |||
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1977 |
|
SU699643A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
