Изобретение относится к механичесКИМ передачам, а именно к волновым Фрикционным передачам с механическим генератором волн деформации, и может быть использовано в качестве исполнительного устройства в высококачественных силовых приводах, например промышленных роботов.
Цель изобретения,-, обеспечение регулировки нагрузочной способности и кинематической точности передачи.
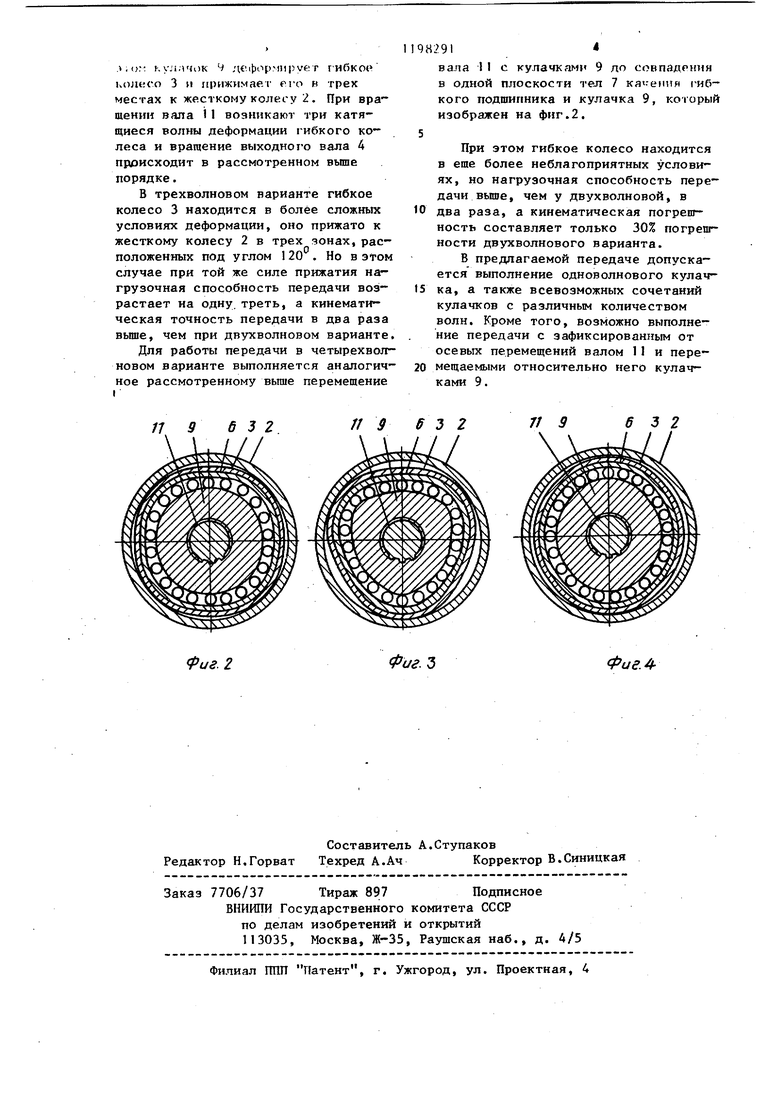
На фиг,1 показана передача, реализующая три варианта чисел волн деформации, и пример ее соединения с устройством продольного перемещения генератора чолн, разрез; на фиг.2 - поперечное сечение передачи по кулачку, имеющему овал с четырьмя вершинами; на фиг.З - то же, с тремя вершинами; на фиг.4 - то же, .с двумя вершинами.
Передача содержит установленные в корпусе 1 жесткое колесо 2, гибкое колесо 3 и установленный внутри него генератор волн. Гибкое колесо З.со- единено с выходным валом 4, установленным на подшипниках 5. Генератор волн имеет гибкий подшипник, включающий внешнее кольцо 6. и тела 7 качения в сепараторе и закрепленный от осевых перемещений по гибкому KO4iecy 3 посредством фиксатора 8, и кулачки 9 в виде овалов с различным числом вершин. Кулачки 9 с устаиовленными между ними и плавно сопрягающими их овалы дисками 10 закреплены на входном валу 11 посредством гайки 12 и упора 13. Входной вал 11 через направляющую втулку 14 и подшипники 15 опирается на корпус 1 и имеет устройство 16 осевого перемещения кулачков 9 для последовательного их контакта с телами 7 качения, для чего диски 10 имеют переходные профили, т.е..в каждом осевом сечении кромки кулачков 9 соединены плавной кривой, по которой тела 7 качения гибкого подшипника могут свободно перекатываться при осевом перемещении генератора волн с одного кулачка на другой. Устройство 16 может быть выполнено как рычажного типа с ручным переклю чателем, так и с применением электромагнитного, пневмо- и гидропривода. В описываемом варианте вал И для соединеи1тя с двигячелем снабжен
982912
шлицбвым хвостовиком, позволяющим осуществить осевые перемеп1ения вала.
Устройство работает следующим образом.
5 Дпя работы передачи в варианте двухволновой деформации гибкого колеса 3 устройство 16 перемещения воздействует на вал 1 с закрепленньши на нем кулачками 9, перемещая их в положение, при котором кулачок с двумя вершинами овала (фиг.4) находится в одной плоскости с телами 7 качения гибкого подшипника. Такое взаимное положение вала 11 и гибкого подшипника допускается и в качестве исходного, не требующего срабатьгоания устройства 16 перемещения. При этом двухволновой кулачок 9 через тела 7 качения и внешнее кольцо 6 подшипника деформирует гибкое колесо 3, прижимая его в местах наибольшего диаметра кулачка 9 к жесткому колесу 2 с силой, которая определяется конструкцией элементов передачи. Двигатель приводит вал 11 вместе с кулачками 9 во вращение, вследствие чего возникают катяш еся две волны деформации гибкого колеса 3. Так как сопрягаемые между собой поверхности жесткого 2 и гибкого 3 колес имеют разные дпины, то происходит смещение этих колес друг относительно друга и связанный жестко с гибким колесом 3 выходной вал 4 начинает вращаться.
В рассмотренном двухволновом варианте при малой ширине зон зацепления гибкое колесо 3 находится в наиболее благоприятных условиях деформации, что увеличивает его долговечность, однако этот вариант устугпает трех- и четырехволновому по кинематической точности, а также по нагрузочной способности, так как силу радиального воздействия кулачка 9 на тела 7 качения куткно выбирать из условия отсутствия при продолжительной работе явлений выкрашивания и раскатывания материала колес 2 и CQ 3 и кольца 6 подшипника.
Для работы передачи в варианте трехволновой деформации гибкого колеса 3 устройство 16 перемещения устанавливает вал 1I с кулачками 9 55 в положение, при котором кулачок с тремя вершинами овала (фиг.З) находится в одной плоскости с телами 7 качения гибкого подшипника. При
л, or- к yji,40K ч дс.формируе т гИбкое KOJUMo 3 и прижимает РГО в трех местах к жесткому колесу 2. При вра щенин вала 11 возникают три катящиеся волны деформации гибкого колеса и вращение выходного вала 4 происходит в рассмотренном выше порядке.
В трехволновом варианте гибкое колесо 3 находится в более сложных условиях деформации, оно прижато к жесткому колесу 2 в трех зонах, расположенных под углом . Но в этом случае при той же силе прижатия нагрузочная способность передачи возрастает на одну, треть, а кинематическая точность передачи в два раза вьше, чем при двухволновом варианте.
Для работы передачи в четырехволновом варианте выполняется аналогичное рассмотренному выше перемещение
I982914
вала 1I с кулачками 9 до совпадения в одной плоскости тел 7 кя-ения |Ибкого подшипника и кулачка 9, который изображен на фиг.2. 5
При этом гибкое колесо находится в еще более неблагоприятных условиях, но нагрузочная способность передачи вьш1е, чем у двухволновой, в
10 два раза, а кинематическая погрешность составляет только 30% погрешности двухволнового варианта.
В предлагаемой передаче допускается выполнение одноволнового кулач15ка, а также всевозможных сочетаний кулачков с различным количеством волн. Кроме того, возможно выполнение передачи с зафиксированным от осевых перемещений валом 11 и перемещаемыми относительно него кулачками 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВАЯ ПЕРЕДАЧА С ДВУМЯ ДЕФОРМИРУЕМЫМИ ЗУБЧАТЫМИ ИЛИ ФРИКЦИОННЫМИ КОЛЕСАМИ АБРАМОВА В.А. | 2015 |
|
RU2597055C1 |
| Волновая зубчатая передача | 1982 |
|
SU1040248A1 |
| Волновая передача | 1981 |
|
SU989203A1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ РЕГУЛИРУЕМЫЙ ГЕНЕРАТОР ДВУХВОЛНОВОЙ ПЕРЕДАЧИ | 1991 |
|
RU2006730C1 |
| ВОЛНОВАЯ ПЕРЕДАЧА | 1978 |
|
SU1839911A1 |
| ВОЛНОВАЯ ГЕРМЕТИЧНАЯ ПЕРЕДАЧА АБРАМОВА В.А. | 2012 |
|
RU2551556C2 |
| ВОЛНОВАЯ ПЕРЕДАЧА | 1997 |
|
RU2132495C1 |
| ВОЛНОВАЯ ПЕРЕДАЧА | 1992 |
|
RU2041552C1 |
| ЗУБЧАТАЯ ШАРНИРНО-РОЛИКОВАЯ ПЕРЕДАЧА | 1999 |
|
RU2177090C2 |
| ГЕНЕРАТОР ВОЛНОВОЙ ПЕРЕДАЧИ | 1993 |
|
RU2091646C1 |
1. ВОЛНОВАЯ ФРИКЦИОННАЯ ПЕРЕДАЧА, содержащая жесткое колесо, гибкое колесо и установленный внутри него генератор волн, имеющий кулачок в виде овала и контактирующий с ним г f 7 гибкий подшипник, отличающаяся тем, что, с целью обеспечения регулировки нагрузочной способности и кинематической точности, гибкий подшипник закреплен от осевых перемеще1шй по гибкому колесу, передача снабжена по меньЩей мере одним дополнительным кулачком, жестко соединенным с основным кулачком и имеющим отличное от него число вершин овала, основной и дополнительный кулачки установлены с возможностью осевого .перемещения для последовательного контакта с гибкнм подшипником, 2. Передача поп.1, отлич ающ а я с я тем, что она снабжена дис(П ком, установленным между кулачками и плавно сопрягающим их овалы.
Риг. 2
Фиг.Ъ
Фиг. 4
| ВОЛНОВАЯ ФРИКЦИОННАЯ ПЕРЕДАЧА | 0 |
|
SU240429A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Цейтлин Н.И., Цукерман Э.М | |||
| Волновые передачи | |||
| Машиностроительные материалы, конструкции и расчет деталей машин | |||
| Гидропривод | |||
| ВИНИТИ, М., 1972, с | |||
| Экономайзер | 0 |
|
SU94A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
