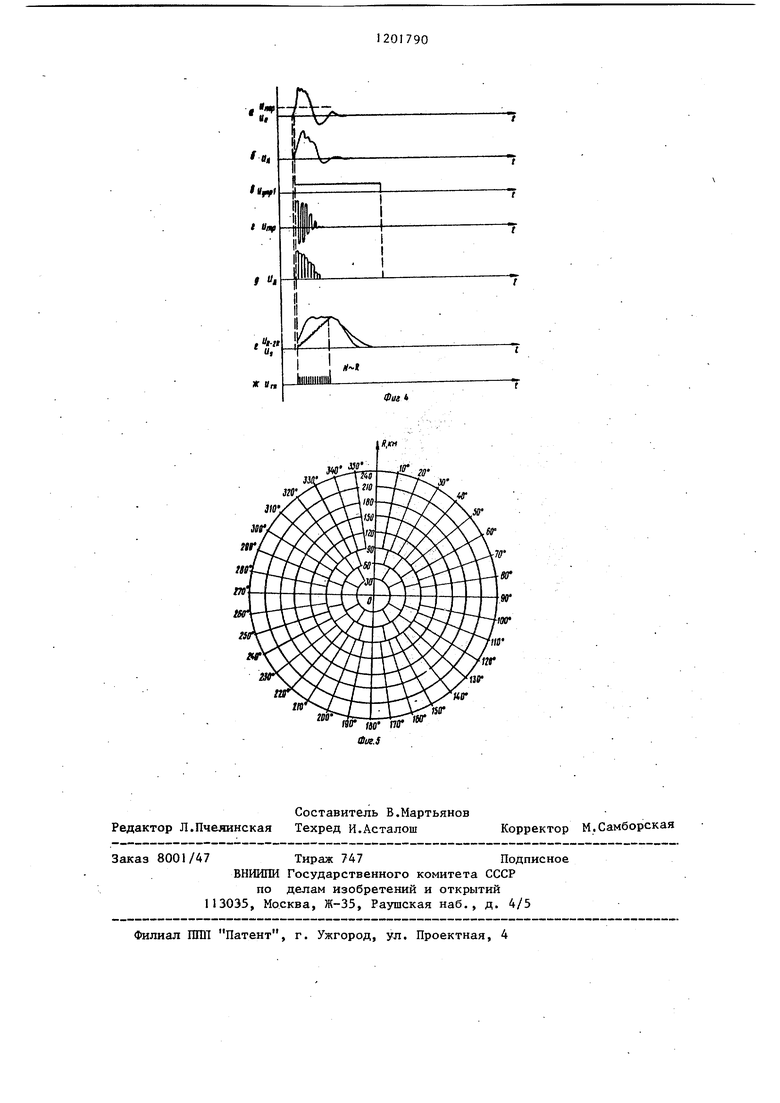
2.Грозопеленгатор-дальномер по п. 1, отличающийся гем, что блок управления содерясит пороговый блок, генератор импульсов и счетчик импульсов, причем вход порогового блока является входой блока управления, выход порогового блока подключен к первому входу генератора импульсов, выходами подклю{ченного к -эходу счетчика -импульсов,
первый, второй и третий выходы которого являются выходами блока управления, а четвертый выход соеД1шен с вторым входом генератора имдульсов.
3.Грозопеленгатор-дальномер по п. 1,отличающийся тем, что пеленгатор содержит фазовращатель УГ /2, три усилителя-ограничителя, сумматор, вычитающий блок, генератор импульсов, три триггера, два элемента И, элемент ИЛИ-и счетчик импульсов, причем первые входы сумматора и вычитающего блока объединены и являются первым входом пеленгатора, вход фазовращателя F/2 является вторым входом пеленгатора, вход третьего усилителя-ограничителя является третьим входом пеленгатора, выход фазовращателя ч/2 соединен с вторыми входами сумматора и вычитающего блока, выход сумматора через последовательно соединенные первый усилитель-ограничитель и первый триггер соединены с первым входом первого элемента И, выход вычитающего блока через последовательно соединенные второй усилитель-ограничитель и второй триггер соединен с вторым входом второго элемента И, первый выход генератора импульсов подключен к второму входу первого элемента И, второй выход генератора импульсов подключен к первому входу второго элемента И, выход третьего усилителя-ограничителя соединен с входом третьего триггера, первый выход которого соединен с третьим входом первого элемента И, а второй вькод третьего триггера - с четвертым входом второго элемента И, управляющий вход пеленгатора соединен с четвертым входом первого, третьим входом второго элементов И
и управляющими входами первого, второго и третьего триггеров, выходы первого и второго элементов И соединены с первым и вторым входами
201790
элемента ИЛИ, выходом подключенного к первому входу счетчика импульсов, второй вход которого соединен с управляющим входом пеленгатора, выход счетчика импульсов является выходом пеленгатора.
4. Грозопеленгатор-дальномер по . п. 1, отличающийся тем, что амплитудный дальномер содержит детектор, интегратор, компаратор, генератор импульсов, элемент И, счетчик импульсов, блок аналоговых ключей, резисторную матрицу, функциональный преобразователь, . источник опорного напряжения, причем вход детектора является входом амплитудного дальномера, выход детектора через интегратор соединен с первым входом компаратора, выходом подключенного к первому входу элемента И, выход генератора импульсов соединен с вторым входом элемента И, а третий вход элемента И является управляющим входом амплитудного дальномера, выход элемента И подключен к входу счетчика импульсов, первый выход счетчика импульсов соединен с первым входом функционального преобразователя, второй вход которого является вторым управляющим входом амплитудного дальномера, а вьпсод - выходом амплитудного дальномера, второй вход счетчика -импульсов соединен с первым входом блока аналоговых ключей, выход которого соединен с входом- резисторной матрицы, выход резисторной матрицы подключен к второму входу компаратора, выход источника опорного напряжения соединен с вторым входом блока аналоговых ключей.
5. Грозопеленгатор-дальномер по п. 1, отличающийся тем, что арифметический блок содержит два элемента И, два оперативных запоминающих блока, преобразователь кода, D-триггер, причем первые входы первого элемента И и преобразователя кода объединены и являются первым входом арифметического блока, а второй вход преобразователя кода является первым управляющим входом арифметического блока, выход преобразователя кода соединен с первыми входами первого и второго оперативных запоминающих блоков, второй управляющий вход
арифметического блока соединен с третьим и вторым входами первого и второго оперативных запоминающих блоков, второй вход арифметического блока соединен с вторым и третьим входами первого и второго оперативных запоминающих блоков и первым входом второго элемента И, выход первого оперативного запоминающего блока соединен с четвертым
1790
входом второго оперативного запоминающего блока, выход которого через Т)-триггер соединен с четвертым входом первого оперативного запоминающего блока и вторыми входами первого и второго элементов И, выход первого элемента И является первым выходом арифметического блока, выход второго элемента И - вторым выходом арифметического блока.


| название | год | авторы | номер документа |
|---|---|---|---|
| Грозопеленгатор-дальномер | 1984 |
|
SU1187120A1 |
| БОРТОВОЙ ГРОЗОПЕЛЕНГАТОР-ДАЛЬНОМЕР | 2000 |
|
RU2200963C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОЛНИЕВОГО РАЗРЯДА И МНОГОПУНКТОВАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2253133C2 |
| Однопунктная система местоопреде-лЕНия гРОз B ближНЕй зОНЕ | 1979 |
|
SU800922A1 |
| Устройство для определения местопо-лОжЕНия гРОз B ближНЕй зОНЕ | 1979 |
|
SU836611A1 |
| Устройство для калибровки измерителей дальности до молниевых разрядов | 1979 |
|
SU775704A1 |
| КРУГОВОЙ ПЕЛЕНГАТОР (ВАРИАНТЫ) | 2006 |
|
RU2319162C9 |
| УСТРОЙСТВО ПОИСКА МОЛНИЕВЫХ РАЗРЯДОВ | 2015 |
|
RU2595253C1 |
| ОДНОПУНКТОВЫЙ СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 1993 |
|
RU2054690C1 |
| Устройство для калибровки измерителей дальности до молниевых разрядов | 1980 |
|
SU938235A2 |


1. ГРОЗОПЕЛЕИГАТОР-ДАЛЬНОМЕР, содержащий магнитные антенны с косинусной и син5сной диаграммами направленности и электрическую антенну с круговой диаграммой направленности, соединенные через первый, второй и третий полосовые фильтры соответственно с первым, BTopbiM и третьим входами пеленгатора, магнитные антенны соединены через четвертый и пятый полосовые фильтры соответственно с первым и вторым фазовращателями F/4, выходы которых подключены к входам сумматора, выход которого соединен с входом амплитудного дальномера, отличающийся тем, что, с целью повьшения точности и вероятности правильного определения координат грозовых очагов, в него введены блок управления и арифметический блок, причем вход блока управления соединен с выходом электрической антенны, первый выход блока управления соединен с управляющим входом пеленгатора и первым управляюищм входом амплитудного дальномера, второй выход блока управления подключен, к первому управляющему входу арифметического блока и второму управляющему входу амплитудного дальномера, третий выход блока уп(Л равления соединен с рторым управС ляющим входом арифметического блока, выход пеленгатора подключен к первому входу арифметического блока, выход амплитудного дальномера, под- ; ключей к второму входу арифметического блока, два выхода арифметичес-. кого блока являются выходами грозопеленгатора-дальномера. 1 g 
1
Изобретение относится к радиотехнике и может быть использовано для определения координат (дальности и пеленга) грозовых очагов.
Цель изобретения - повышение точности и вероятности правильного определения координат грозовых очагов.
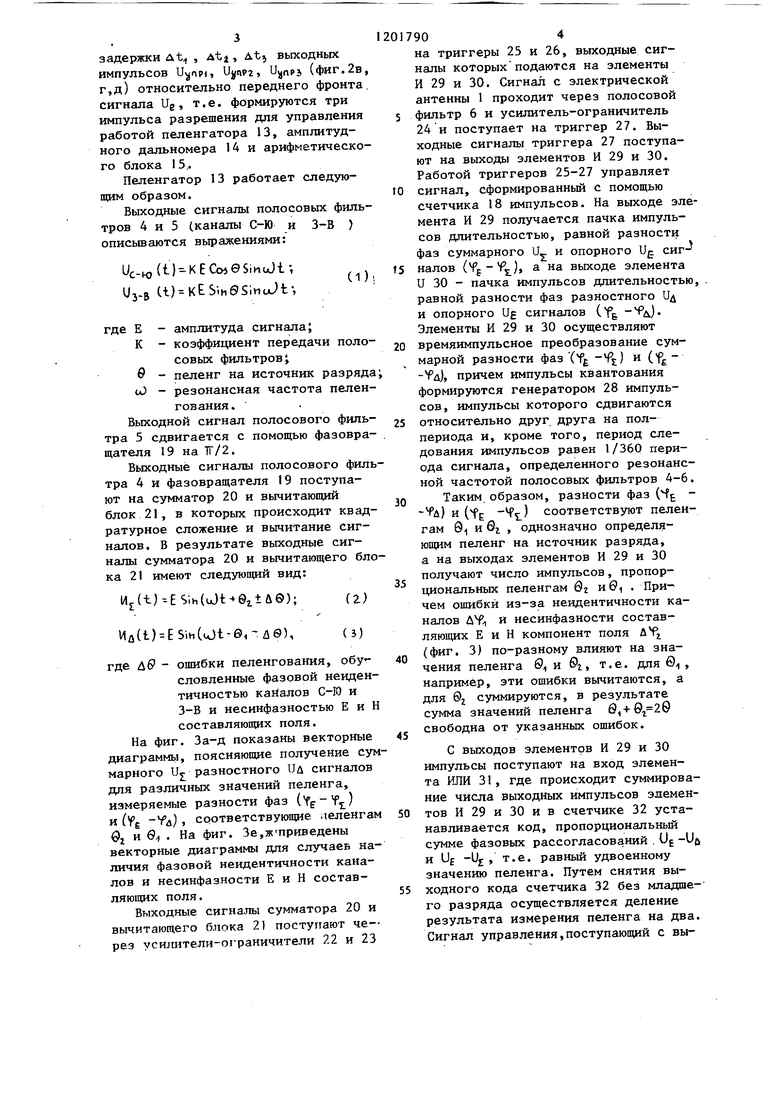
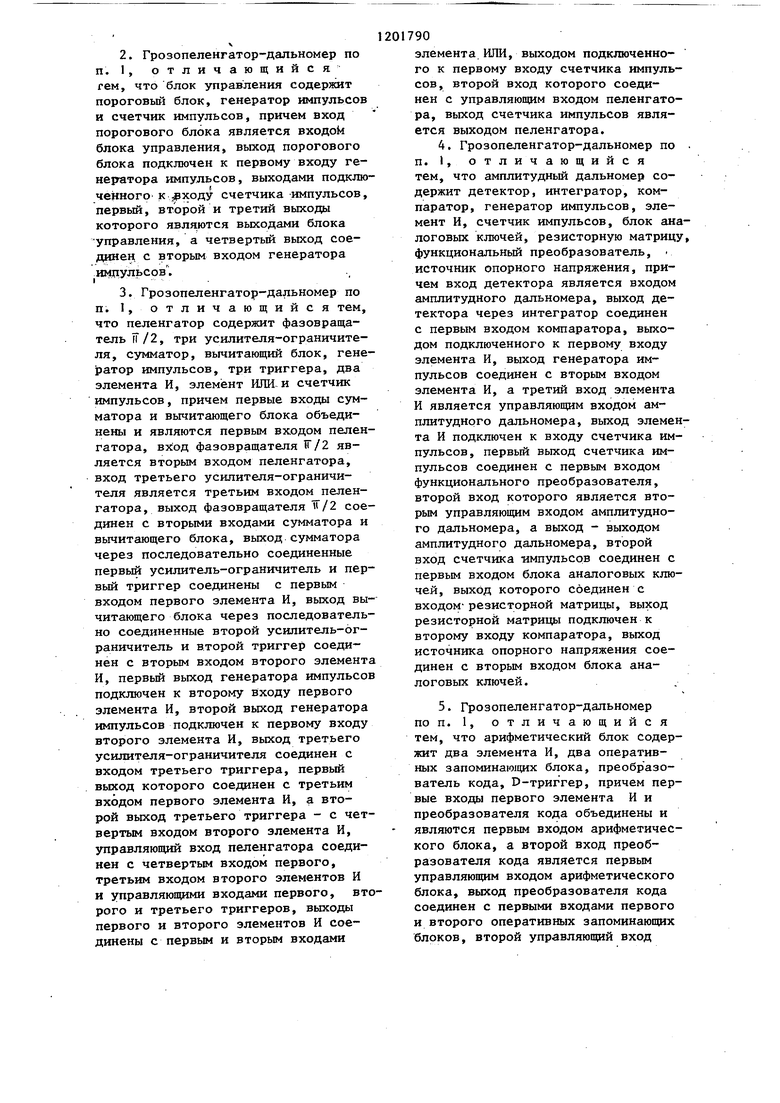
На фиг. I представлена структурная электрическая схема грозопеленгатора-дальномера; на фиг. 2 - временные диаграммь: работы грозопеленгатора-дальномера; на фиг. 3 - векторные диаграммы, поясняющие получение суммарного Uj и разностного ид сигналов; на фиг. 4 - временные диаграммы работы амплитудного дальномера; на фиг. 5 - индикатор грузопеленгатора-дальномера с разбивкой его площади на координатные ячейки,
Грозопеленгатор-дальномер содержит электрическую.антенну 1 с круговой диаграммой направленности, магнитные антенны 2 и 3 с косинусной и синусной диаграммами направленности, полосовые фильтры 4-8, фавращатели 9 и 10 на , сумматор 11, блок 12 управления, пеленгатор 13,-амплитудный дальномер 14 и арифметический блок 15.
Блок 12 управления образуют пороговый блок 16, генератор 17 импульсов и счетчик 18 импульсов.
Пеленгатор 13 содержит фазовращатель 19 на , сумматор 20, вычитающий блок 21, усилители-ограничители 22-24, триггеры 25-27, генератор. 28 импульсов,- элементы И 29 и 30, элемент ИЛИ 31 и счетчик 32 импульсов .
Амплитудный дальномер 14 состоит из детектора 33, интегратора 34, генератора 35 импульсов, компаратора 36, элемента И 37, счетчика
38 импульсов, блока 39 аналоговых ключей, резисторной матрицы 40, функционального преобразователя 41 и источника 42 опорного напряжения. Арифметический блок 15 содержит
элемент И 43, преобразователь 44 кода, оперативные запоминающие блоки 45 и 46,D -триггер 47 и элемент И 48.
Грозопеленгатор-дальномер работает следующим образом.
Под воздействием электромагнитного излучения молниевого разряда в электрической антенне 1 с круговой и в магнитных 2 и 3 антеннах
с синусной и косинусной диаграм- . мами направленности наводятся импульсные сигналы, которые поступают на входы полосовых фильтров 4-6 с резонансной частотой 7+0,5 кГц.
Сигналы с магнитных антенн 2 и 3 поступают также на прлосовые фильтры 7 и 8, настроенные ка резонансную частоту 60+7 кГц . Сигнал t электрической антенны 1 поступает на вход блока 12 управления.
Блок управления работает следующим образом.
При превьшении входным -сигналом Ue (фиг.2а) порогового уровня Unop
(фиг-.2а) электрической антенны 1 срабс-тывает пороговый ёлок 16 и запускается генератор 17 импульсов, вырабатывающий прямоугольные импульсы IJ (фиг.2б),поступающие HS, зход
счетчика 18. Три выхода сче;чкка 18 определяют различные времег/гные 3 задержки At , At j , At выходных импульсов , Uj(np2, (фиг.2в г,д) относительно переднего фронта сигнала Ug, т.е. формируются три импульса разрешения для управления работой пеленгатора 13, амплитудного дальномера 14 и арифметического блока 15.. Пеленгатор 13 работает следующим образом. Выходные сигналы полосовых фильтров 4 и 5 (каналы С-Ю и 3-В ) описьшаются выражениями: Uc-H(t)KEa«eSiKiu)t-, УЗ-В Ct)-KES-.h0SiM(Jt-, где Е - амплитуда сигнала; К - коэффициент передачи поло совых фильтров; б - пеленг на источник разряд и) - резонансная частота пелен гования. Выходной сигнал полосового фильтра 5 сдвигается с помощью фазовращателя 19 на 7Г/2. Выходные сигналы полосового филь тра 4 и фазовращателя 19 поступают на сумматор 20 и вычитающий блок 21, в которых происходит квадратурное сложение и вычитание сигналов. В результате выходные сигналы сумматора 20 и вычитающего бло ка 21 имеют следующий вид: nj(t)--ES-,h(u)t 0itu©); (г) Hfl{t) ESin(43t-0,-zs0), (j) где Дб - ошибки пеленгования, обусловленные фазовой неидентичностью каналов С-Ю и 3-В и несинфазностью Е и Н составляющих поля. На фиг. За-д показаны векторные диаграммь, поясняющие получение сум марного Ur разностного Пд сигналов для различных значений пеленга, измеряемые разности фаз () и (Vg f&) соответствующие пеленгам Oi и в . На фиг. Зе,жприведены векторные диаграммы для случаев наличия фазовой неидентичкости каналов и несинфазности Е и Н составляющих поля. Выходные сигналы сумматора 20 и вычитающего блока 21 поступают че- рез усшштели-ограничители 22 и 23 904 на триггеры 25 и 26, выходные сигналы которых подаются на элементы И 29 и 30. Сигнал с электрической антенны 1 проходит через полосовой фильтр 6 и усилитель-ограничитель 24 и поступает на триггер 27. Выходные сигналы триггера 27 поступают на выходы элементов И 29 и 30. Работой триггеров 25-27 управляет сигнал, сформированный с помощью счетчика 18 импульсов. На выходе элемента И 29 получается пачка импульсов длительностью, равной разности фаз суммарного U и опорного Ug сигналов (), а на выходе элемента и 30 - пачка импульсов длительностью, равной разности фаз разностного Цд и опорного UE сигналов (f . Элементы И 29 и 30 осуществляют времяимпульсное преобразование суммарной разности фаз (fg -Vj;) и (), причем импульсы квантования формируются генератором 28 импульсов, импульсы которого сдвигаются относительно друг друга на полпериода и, кроме того, период следования импульсов равен 1/360 периода сигнала, определенного резонансной частотой полосовых фильтров 4-6. Таким образом, разности фаз (Н ) и ( -Ч) соответствуют пеленгам 0 и бг , однозначно определяющим пеленг на источник разряда, а на выходах элементов И 29 и 30 получают число импульсов, пропорциональных пеленгам &г нв . Причем ошибки из-за неидентичности каналов ДУ и несинфазности составляющих Е и Н компонент поля ДУ (фиг. 3) по-разному влияют на значения пеленга 0 и ©г, т.е. для 0, например, эти ошибки вычитаются, а для 0J суммируются, в результате сумма значений пеленга б,+ свободна от указанных ошибок. С выходов элементов И 29 и 30 импульсы поступают на вход элемента ИЛИ 31, где происходит суммирование числа выходных импульсов элементов И 29 и 30 и в счетчике 32 устанавливается код, пропорциональный сумме фазовых рассогласований . Ug -U и UE -Uj , т.е. равный удвоенному значению пеленга. Путем снятия выходного кода счетчика 32 без младшего разряда осуществляется деление результата измерения пеленга на два. Сигнал управления,поступающий с выхода счетчика 18, дает разрешение на счет импульсов счетчиком 32. Амплитудный дальномер 14, временные диаграммы работы которого показаны на фиг. 4, работает следующим образом. Сигнал магнитных антенн 2 и 3 UH (фиг. 4а,б) на выходе полосовых фильтров 7 и 8 имеет вид ипор(.Фиг.4г и описьшается выражением (, ) . Выход яые сигналы полосовых фильтров 7 и . 8 сдвигаются по фазе фазовращателем 9 и 10 на /4 и затем суммируются в сумматоре 11 . На вьгходе сумматора 11 сигнал описывается выражением 12). Выходное сигнал сумматора 11 выпрямляется детектором 33, амплитудное значение которого Ug 1.Фиг.4д запоминается с помощью интегратора 34. Для преобразователя амплитудного значения сигнала н соответствующий цифровой код используется ана лого-цифровое преобразование. Оно заключается в сравнении амплитуды сигнала с зталонным ступенчатым напряжением, дискретные значения которого определяются текущими цифровыми кодами. Аналого-цифровое преобразование происходит следующим образом. , С интегратора 34 сигнал и,(фиг.4 поступает на первый вход компаратора 36, на второй вход KOTopqro подается ступенчатое эталонное напряжение -if. СФиг. 4е) с выхода резисторной матрицы 40 типа -2R. В исходном состоянии, т.е. при отсутствии сигналов на входе компаратора 36, а также в течение временя с момента появления сигналов Uj и UK-2.1;ДО момента их сравнения, на выходе компаратора формируется разрешающий сигнал, который подается на первый вход элемента И 37. С момента поступления управляющего сигнала (фиг. 4в) на первый вход элемента И 37, прямоугольные импульсы. UpJ, (фиг. 4ж) с генератора 35 через второй вход элемента И 37 подаются на его выход и далее на вход счетчика 38 импульсов, на первом выходе которого формируются текущие цифровые коды. На втором выходе счетчика 38- формируются аналогичные цифровые коды, поступающие на первый вход блока 39 аналоговых ключей для управления подключением стабилизирующего источника 42 напряжения через второй вход блока 39 аналоговых ключей к входам резисторной матрицы 40. В результате на выходе резисторной матрицы 40 формируется ступенчатое напряжение U( Сфиг. 4е), дискретные значения которого соответствуют текущим значениям выходных цифровых кодов счетчика 38. В момент равенства сигналов Uj интегратора 34 и ступенчатого напряжения иц-т.((.фиг.4е) с выхода резисторной матрицы 40 на выходе компаратора 36 формируется импульс, запрещающий прохождение импульсов Upy (фиг. 4-ж) генератора 35 через элемент И 37 на вход счетчика 38. Таким образом, в момент равенства сигналов DS и U,:, фиксируется на первом выходе счетчика 38 цифровой код, соответствую1ций амплитудному значению сигнала интегратора 34. В результате аналого-цифрового преобразования -производится линейная дискретная оценка амплитуд сигналов молниевых разрядов, т.е. выходные цифровые коды счетчика 38 прямо пропорциональны величине амплитуды сигнала интегратора 34. Формула для измерения дальности амплитудным дальномером имеет вид: . х-Ко(Ио/И,) где R - измеряемая дальность до грозового очага; DO - пороговое эталонное ступенчатое напряжение; RO - пороговое расстояние, соот-. ветствующее текущим кодгш, формирующим, пороговое ступенчатое напряжение. Ux - амплитуда сигнала молниевого разряда, ,1-1,2 - коэффициент затухания.. Оценка дальности производится дискретно, т.е. оцениваются интервалы расстояний 0-30, 30-75, 75-200, 200-400 км. Для повьшения достоверности полу- ченного конечного результата в грозопеленгаторе-дальномере вводится арифметический блок 15, в котором производится статистическая обработка информации о грозовых очагах по кригерию , т.е. значение дальности из одного грозового очага вблизи некоторого значения должно повторит ся не менее трех раз. Формула оценки дальности с учетом (У и статистической обработки информации о пеленге и дальности и ет вид: z: о hi-i Ч и, / где 111 - критерий оценки дальности uGh - угловой сектор ц-ой ячейки в котором происходит накоп ление информации о координатах молниевых разрядов. Таким образом, для повышения вероятности правильной оценки координат грозовых очагов, в частности оценки расстояния, по совокупности измеренных значений далькости до отдельных молниевых разряд производится накопление и сопряжение информации о дальности и пелен и ее статистическая обработка по указанному вьше критерию. На фиг. 5 показана разбивка площади радиусом 310 км с учетом центра в пункте наблюдения на ячейки, в пределах которых производится накопление и оценка координат молниевых разрядов. Размеры ячеек опреде ляются дискретными значениями интер валов дальности и равны 30x30 км. Арифметический блок 15 работает следующим образо1 1. С пеленгатора 13 коды пеленга поступают на вход преобразователя кода 44 арифметического блока 15, где по сигналу разрешения Ицпр г. (фиг. 2г) производится преобразование групп кодов азимута в коды соответствующих ячеек (фиг. 5) . Выходные коды преобразователя 44 кодов азимута и выходные коды функционального преобразователя 41 амплитудного дальномера 14 подаются соответственно на второй и тре1™й входы оперативных запоминаюf блоков 45 и 46.. По сигналу разрешения ицпр с фиг. 2д) с второго (управляющего входа арифметического блока 15 происходит запись информации об азимуте U и дальности и ( фиг. 2ж, 3, и) последовательно по мере прихода сигналов молниевых разрядов сначала в первый оперативный запоминающий блок 45 (Фиг. 2к), затем во второй(фиг.2л . В момент регистрации информации о пеленге в и дальности R в одной и той же ячейке в третий раз за все время существования грозового. процесса (время наблюдения выбирается равным 15-30 мин в зависимости от интенсивности ) на выходе -триггера 47 формируется управляющий импульс (фиг. 2м), который разрешает передачу кодов пеленга (фиг. 2н) и дальности (фиг. 2с) через элементы И на выход индикатора грозового пеленгатора-дальномера.
nOf)
о i/f
r llynpj г Uynp2
д чпр
(СИ)
e и пелена
Hf бальн. 3 fJe и -Uft
К Uo3yl
Л М
н п-д
о n-R
рцг.2
HC-«
Hj-fi
U&
§)
J3-B
Uc-Ю A
в 270
AUc-fo г
6) 90 в 180
и,
д) 270 в 360 .в
Ф1/а.З
| Авторское свидетельство СССР 592250, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения местоположения грозовых очагов | 1972 |
|
SU446004A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
