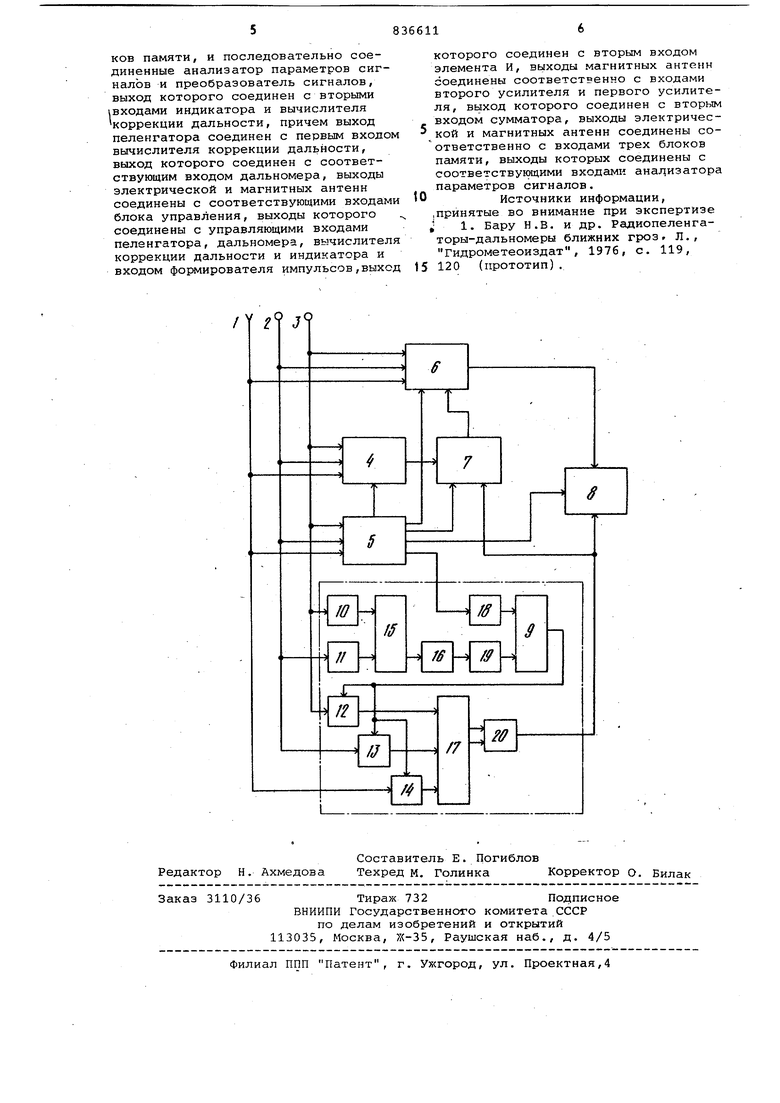
(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ГРОЗ В БЛИЖНЕЙ ЗОНЕ ственно с входами второго усилителя и первого усилителя, выход которого соединен с вторым входом сумматора, выходы электрической и магнитных антенн .соединены соответственно с входами трех блоков памяти, выходы 1которых соединены с соответствующим входами анализатора параметров сигна ла. На чертеже представлена структурная электрическая схема предложенного устройства. Устройство содержит электрическую 1 и магнитные 2 и 3 антенны, пеленгатор 4, блок 5 управления, дальномер 6, вычислитель 7 коррекции дальности , индикатор 8, элемент И 9 усилители 10 и 11, три блока 12, 13 и 14 памяти, сумматор 15, блок 16 дифференцирования, анализатор 17 параметров сигналов, формирователь 18 импульсов, формирователь 19 импульсов нуль-переходов и преобразова тель 20 сигналов. Устройство работает следующим образом. Сигнал атмосферного разряда прини мается электрической 1 и магнитными 2 и 3 антеннами и поступает на пелен гатор 4, 6 и блок 5 управления. Если эти .сигналы превышают заданный пороговый уровень, то блок 5 управления вырабатывает, сигналы, разрешающие работу пеленгатора 4,дал номера 6, вычислителя 7 коррекции дальности и индикатора 8 в соответствующие моменты времени. Разрешающие сигналы подаются на управляющие входы этих устройств. Цифровые значения грубого и точного пеленга с выхода пеленгатора 4 поступают на вычислитель 7, где определяется параметр произвольной ориентации l) tg(9-&) и параметр коррекции измеренной дальности 1 + Я-
где 0 - пеленг, 5L - длина волны
Сигнал параметра коррекции подается на дальномер 6, содержащий решающее устройство, которое производит определение дальности и корректирует измеренную дальность.Значения точного пеленга и дальности подаются на индикатор 8.
Индикатор 8 воспроизводит на зк, ране совмещенную информацию дальности и точного пеленга в виде яркостной точки, угловое положение которой относительно направления на север определяет .пеленг,а отстояние от центра экрана в установленном масштабе воспроизводит дальность до источника разряда.
Пеленгатор точного пеленга принимает сигналы магнитных антенн 2 и 3 на усилители 10 и 11 и на блоки 12 и 13 памяти. Сигнал электрической антенны поступает на блок 14 памяти Выходные сигналы усилителей 10 и 11
Формула изобретения
Устройство для определения местоположения гроз в ближней зоне,содержащее электрическую и две взаимно перпендикулярные магнитные антенны, пеленгатор, дальномер и индикатор, причем выходы электрической и магнитных антенн соединены с соответствующими входами пеленгатора и дальномера, выход которого соединен с первым входом индикатора, о т л ич.ающееся тем, что, с целью повышения точности местоопределения гроз, введены блок управления, вычислитель коррекции дальности,форМ15рователь импульсов, первый усилитель, три блока , последовательно соединенные второй усилитель, сумматор, блок дифференцирования, формирователь импульсов нуль-переходов и элемент И, выход которого соединен с управляющими входами блосуммируются в сумматоре 15,выходной сигнал которого подается на последовательно соединенные блок 16 дифференцирования и формирователь 19, где осуществляется дифференцирование суммарного сигнала и выделение нулевого.перехода. По сигналу,принятому по управляющему в.ходу пеленгатора, в формирователе 18 формируется строб-импульс выборки длительностью 8 МКС. Строб-импульс с формирователя 18 поступает на элемент И 9 и разрешает прохождение сигнала нулевого перехода дифференцированного сумматора сигнала с . формирователя 19 на блоки памяти 12-14. В блоках памяти производится запоминание пиковых значений сигналов антенн 1-3, которые затем поступают на анализатор 17. Исходя из полярности сигнала всенаправленной антенны, анализатор 17 устанавливает полярность выходных аналоговых сигналов, соотношение амплитуд, знак которых определяет пеленг. Функциональный преобразователь 20 осуществляет преобразование аналоговых сигналов пеленга в его цифровое.значение, поступающее на индикатор 8 и в вычислитель 7 коррекции дальности. Таким образом, предлагаемая угломерно-дальномерная система местоопределения гроз в ближней зоне (до 100-150 км) позволяет: повысить точность измерения пеленга более чем в 5 раз, которая составляет теперь повысить точность измерения дальности более чем в 5 раз и довести ее до 10% R измеряемой дальности; .совместить отражение информации о дальности и пеленге на одном индикаторе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Однопунктная система местоопреде-лЕНия гРОз B ближНЕй зОНЕ | 1979 |
|
SU800922A1 |
| Однопунктная система местоопределения гроз в ближней зоне | 1978 |
|
SU720384A1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1187120A1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1201790A1 |
| БОРТОВОЙ ГРОЗОПЕЛЕНГАТОР-ДАЛЬНОМЕР | 2000 |
|
RU2200963C2 |
| ОДНОПУНКТОВЫЙ СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 1993 |
|
RU2054690C1 |
| Фазовый анализатор местоположения гроз | 1984 |
|
SU1223175A1 |
| КРУГОВОЙ ПЕЛЕНГАТОР (ВАРИАНТЫ) | 2006 |
|
RU2319162C9 |
| Устройство для определения местоположения грозовых очагов | 1972 |
|
SU446004A1 |
| Устройство для калибровки измерителей дальности до молниевых разрядов | 1980 |
|
SU938235A2 |
