Изобретение относится к области радиотехники, может быть использовано в системах сбора и обработки метеорологической информации, в системах управления воздушным движением, при пожарной охране лесных массивов, для обеспечения безопасности хранения и перевозок взрывоопасных грузов и т.д.
Известны несколько типов систем пассивного местоопределения гроз, основанных на мониторинге электромагнитного поля Земли в сверхдлинноволновом, длинноволновом и ультракоротковолновом (далее СДВ, ДВ и УКВ, соответственно) диапазонах. Все они используют либо пеленгационный, либо разностно-дальномерный методы, либо их комбинацию и предполагают наличие 3-х и более пунктов наблюдения [1].
Сущность пеленгационного способа исходит из предположения, что возможно измерение азимута источника электромагнитного излучения из каждого пункта наблюдения. Местоположение молниевого разряда определяется как пересечение этих азимутов. Такой способ, основанный на УКВ-интерферометрах, реализован в системе SAFIR [2] фирмы Vaisala Dimensions. К ее недостаткам можно отнести возможность работы системы только в пределах прямой видимости, уменьшение точности при увеличении базовых размеров системы, наличие зон с возрастающей ошибкой местоопределения и отсутствие оценок погрешности определения местоположения молниевого разряда. В случае использования для определения азимутов рамочных СДВ пеленгаторов снимается условие прямой видимости разряда, но сильно возрастают погрешности определения пеленга, возникающие из-за поляризационных ошибок.
В разностно-дальномерном способе предполагается, что в каждом пункте наблюдения измеряется время регистрации сигнала от источника электромагнитного излучения. Разность между временами прихода сигнала на два пункта определяет гиперболу, и несколько пунктов определяют несколько гипербол, пересечение которых указывает на источник излучения. На разностно-дальномерном способе местоопределения основана работа широко распространенной системы NLDN фирмы Global Atmospherics (США) [3], работающей также в УКВ-диапазоне. К недостаткам данной системы следует отнести: необходимость высокоточной синхронизации системных часов на пунктах регистрации, работоспособность системы только в пределах прямой видимости, фиксацию только части разрядов, происходящих в зоне наблюдения, и возможное наличие зон с неоднозначным местоопределением разряда. В случае использования для работы СДВ-диапазона снимается условие прямой видимости разряда, но возникают сложности при идентификации принадлежности принятых в разных пунктах сигналов одному и тому же разряду. Возможные интервалы времени между моментами поступления сигналов на разные приемные пункты тем больше, чем длиннее база системы [1]. В пределах такого интервала времени может произойти несколько молниевых разрядов, что приведет к возникновению неопределенности в идентификации соответствия зарегистрированных сигналов конкретному молниевому разряду и, в конечном счете, к снижению вероятности правильного определения местоположения разряда. Вероятность отсутствия такой ошибки уменьшается экспоненциально с укорочением базы системы, но сближение приемных пунктов системы приводит к возрастанию погрешности местоопределения по дальности.
Повысить вероятность и точность местоопределения позволяет разработанная в начале 1990-х годов компанией Global Atmospherics (США) система IMPACT [3], основанная на комбинации разностно-дальномерного и пеленгационного способов. В этом комбинированном способе с каждой пункта наблюдения на сервер передаются пеленг на молниевый разряд и время прихода сигнала. Сервер по этим данным вычисляет координаты молниевого разряда и предоставляет пользователям системы доступ к результатам вычислений. Однако в новой системе осталась необходимость высокоточной синхронизации и возможность работы только в пределах прямой видимости, к тому же увеличилась плотность расположения пунктов наблюдения и стоимость оборудования.
В последние годы компания Global Atmospherics разрабатывает системы разностно-дальномерного высокочастотного трехмерного картирования в УКВ-диапазоне - LDAR и LDAR-2 [4], обладающие возможностью трехмерного местоопределения более тысячи импульсов в каждой молниевой вспышке. Такая система работает только в зоне прямой видимости, требует наличия высокоточной синхронизации и очень большого (более 7-9) числа дорогостоящих сенсоров. В настоящее время эти системы находятся в опытной эксплуатации в США и Японии.
Известна также однопунктовая система местоопределения гроз в ближней зоне, представляющая собой сверхдлинноволновый автономный грозопеленгатор-дальномер (далее СДВ АГПД) [5], позволяющий по результатам мониторинга электромагнитного поля Земли в СДВ диапазоне определить расстояние до молниевого разряда и интервальную оценку пеленга [6]. К недостаткам СДВ АГПД следует отнести недостаточную точность определения местоположения молниевого разряда из-за наличия неопределенности в оценке пеленга, вызванной не вертикальностью молниевого канала. Способ исключения поляризационных ошибок указан в [6], где приведена методика по совместной обработке сигналов двух и более СДВ АГПД, которая позволяет устранить неопределенность в определении пеленга, совместно обрабатывая обобщенные координаты, полученные с каждого пункта наблюдения. Но при этом появляется необходимость знать действующие высоты магнитных и электрических антенн в каждом пункте наблюдения, которые могут быть получены только статистическим способом с использованием эталонных измерителей.
Прототипом способа является комбинированный способ определения местоположения молниевого разряда [2], в котором в нескольких пунктах наблюдения на земной поверхности осуществляют мониторинг электромагнитного поля, регистрацию моментов времени появления сигналов, измерение пеленга на источник сигнала и передачу результатов измерений на центральный пункт, где вычисляют координаты молниевого разряда, с помощью комбинации пеленгационного и разностно-дальномерного способов.
В качестве прототипа системы выбрана система SAFIR [2], содержащая сеть передачи данных и подключенные к ней центральный блок расчетов, блок управления, компьютеры пользователей (по числу пользователей), и сенсоры, представляющие собой УКВ-интерферометрические пеленгаторы. Однако, как уже отмечалось выше, данная система работает только в зоне прямой видимости, поэтому для наблюдения за большими площадями земной поверхности необходимо размещение значительного числа сенсоров. И при этом, вследствие использования для пеленгования интерферометрических принципов работы, данные сенсоры достаточно громоздки и дороги.
Задачами, на решение которых направлено заявляемое изобретение, являются, во-первых, охват большей площади наблюдения при меньшем числе сенсоров, во-вторых, увеличение вероятности обнаружения молниевого разряда.
Для решения указанной задачи в предлагаемом способе определения местоположения молниевого разряда, включающим мониторинг вертикальной составляющей электрического поля и горизонтальной составляющей магнитного поля в нескольких пунктах наблюдения на земной поверхности, в ходе которого регистрируют моменты времени появления сигналов от разрядов и определяют оценки пеленгов на разряды, согласно изобретению, в каждом пункте наблюдения по мгновенным значениям сигналов определяют расстояние между данным пунктом и молниевым разрядом, индуцирующим данный сигнал, затем результаты измерений направляют на центральный пункт, где идентифицируют их соответствие конкретному грозовому разряду, и по соответствующим этому разряду результатам измерений вычисляют координаты его местоположения.
Для реализации предложенного способа в предлагаемой многопунктовой системе определения местоположения молниевого разряда, содержащей сеть передачи данных и подключенные к ней сенсоры, центральный блок расчетов, блок управления и компьютеры пользователей (по числу пользователей), согласно изобретению, в качестве сенсоров использованы сверхдлинноволновые автономные грозопеленгаторы-дальномеры.
Для обоснования предложенного изобретения рассмотрим многопунктовую систему, состоящую из n (n≥3) пунктов наблюдения. Декартовы координаты (xi, yi) i-гo пункта наблюдения (i=1,2,...n), декартовы координаты молниевого разряда (x, y, z) и дальности ri от пунктов i=1,2,...n до источника удовлетворяют системе уравнений

Если пункты наблюдения не лежат на одной прямой, то полученная система будет иметь полный ранг, ее наилучшее в смысле метода наименьших квадратов решение будет равно:
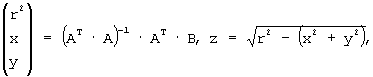

Равенства (1) дают алгоритм определения трех координат источника излучения по величинам расстояний от него до n (n≥3) пунктов наблюдения. Проблему идентифицикации соответствия наблюдаемых сигналов конкретному грозовому разряду можно разрешить с помощью электронно-вычислительной машины (далее ЭВМ) и разработанного авторами программного обеспечения [7], сопоставляя их по времени регистрации, оценкам пеленгов и координатам пунктов наблюдения.
Функциональная схема показана на чертеже. Система содержит: сеть передачи данных 1 и подключенные к ней СДВ АГПД 2k, где k=1,2...n (n - число пунктов наблюдения), центральный блок расчетов 3, блок управления 4, компьютеры пользователей 51, где 1=1,2...m (m - число клиентов системы).
Сеть передачи данных 1 осуществляет передачу данных между блоками системы и представляет собой стандартную компьютерную сеть передачи данных.
Используемые в качестве сенсоров, СДВ АГПД 2k, где k=1,2...n осуществляют: мониторинг электромагнитного поля Земли в СДВ-диапазоне, регистрацию времени tk появления сигнала от молниевого разряда и определение дальности rk до него, передачу через сеть передачи данных 1 значений tk и rk на центральный блок обработки 3 и самотестирование. По запросам центрального блока обработки 3, полученных через сеть передачи данных 1, СДВ АГПД 2k осуществляют синхронизацию собственных системных часов и выполнение тестовых заданий.
Использование СДВ АГПД в качестве сенсоров изменяет функциональные признаки других элементов системы.
Центральный блок расчетов 3 выполняет следующие функции:
1) принимает значения tk и rk, где k=1,2...n, с СДВ АГПД 2k осуществляет идентификацию соответствия наблюдаемых сигналов конкретному грозовому разряду, отбор СДВ АГПД, данные которых будут участвовать в расчетах, нахождение по этим данным декартовых координат разряда в соответствии с (1), расчет его географических координат и сохранение всех полученных и рассчитанных результатов в базе данных;
2) вырабатывает сигналы синхронизации системных часов для всех СДВ АГПД;
3) формирует запросы к СДВ АГПД 2k, где k=1,2...n, на выполнение тестовых заданий в фоновом режиме и по запросу блока управления 4, а результаты тестирования системы и ее элементов передает на блок управления 4;
4) регистрирует компьютеры пользователей 5k, где k=1,2...m, и обеспечивает их доступ к информации в соответствии с установленными правами и правилами, предоставляет по требованию пользователей либо оперативную информацию о грозовой обстановке, либо обеспечивает работу с архивом наблюдений.
Блок управления 4 позволяет администратору системы задавать конфигурацию центрального блока расчетов 3 и управлять его работой, устанавливать права доступа пользователей к данным, формулировать запросы к центральному блоку расчетов 3 для синхронизации системных часов всех СДВ АГПД и тестирования работоспособности системы в целом и ее отдельных элементов, а также отображать информации об их состоянии.
Программное обеспечение компьютеров пользователей обеспечивает регистрацию на центральном блоке обработки 3, оперативное получение информации о текущей грозовой обстановке и работу с архивом наблюдений.
СДВ АГПД 2k где k=1...n, могут быть реализованы в соответствии с [5] с использованием программного обеспечения [8], разработанного в рамках проекта МНТЦ 1822. Центральный блок обработки 3 и блок управления 4 могут быть реализованы на одном или нескольких компьютерах стандартной архитектуры с использованием программного обеспечения [7], разработанного в рамках проектов РФФИ 01-07-90161 и 02-07-06090. На компьютерах пользователей системы 5 также может быть установлено упомянутое выше программное обеспечение. Сеть передачи данных 1 может быть реализована на основе модемных соединений, спутниковых каналов связи или сети Интернет. Таким образом, поставленная техническая задача решается тем, что в многопунктовой системе местоопределения гроз использованы СДВ АГПД по числу пунктов наблюдения, а время регистрации сигналов от молниевого разряда и вычисленная по мгновенным значениям сигналов дальность до разряда от каждого СДВ АГПД используются для идентификации соответствия наблюдаемых сигналов конкретному грозовому разряду и вычисления координат его местоположения.
Введение СДВ АГПД на каждом пункте наблюдения улучшает ряд характеристик многопунктовой системы местоопределения:
1) позволяет увеличить базовые расстояния между сенсорами до 60 км за счет снятия ограничения прямой видимости разряда;
2) прямое измерение дальности до молниевого разряда на каждом пункте наблюдения снимет требование о высокоточной внешней синхронизации их системных часов и устраняет коллизии в идентификации соответствия зарегистрированных сигналов конкретным молниевым разрядам;
3) в расчетных формулах (1) не используется значение пеленга, что позволяет исключить влияние поляризационных ошибок;
4) не требуется знание действующих высот антенн;
5) возможно определение трех координат местоположения источника излучения.
Рассмотрим пример осуществления предложенного в изобретении способа. Пусть три пункта наблюдения, оборудованные СДВ АГПД, расположены с точках со следующими декартовыми координатами: пункт №1 (-50,-50,0), пункт №2 (0,50,0), пункт №3 (50,-50,0). Здесь и далее значения всех координат приведены в километрах. Предположим, что молниевый разряд происходит в точке с координатами (10,10,3). В этом случае с пунктов наблюдения будут получены следующие значения расстояний до источника излучения:



После подстановки требуемых значений в формулу 1 получим:


Таким образом, в приведенном примере, предложенный способ определения местоположения молниевого разряда обладает достаточной устойчивостью и точностью определения координат.
Вопросы определения местоположения молниевых разрядов радиотехническими методами представляют интерес как для фундаментальной науки, так и для практики. Оперативная и достоверная информация о грозовых явлениях позволит решать проблемы геологии, гидрологии, метеорологии, экологии, физики атмосферы, изучения флуктуации электромагнитного поля Земли.
Обнаружение грозовых очагов и слежение за их перемещением важно для грозозащиты линий электропередачи (ЛЭП), службы противопожарной охраны лесов, предупреждения поражения самолетов молниями.
Подавляющее количество аварий и отключений ЛЭП обусловлено прорывом молний сквозь тросовую защиту и поражением фаз, что наносит большой экономический ущерб. Кроме того, молния является источником помех, которые, распространяясь по линиям электропередачи, доходят до потребителя и могут вызвать сбои или отказы в работе приборов.
Для службы защиты лесов от пожаров важно выделять участки возможного возгорания, требующие особого внимания. При этом важно знать полярность разрядов молнии, так как пожары вызываются в основном положительными молниями, при которых переносимый из облака заряд значительно больше, чем при отрицательных молниях.
Активным коммерческим потребителям информации о грозах являются строительные и страховые компании. Для страховых компаний требуется подтверждение факта удара молнии как состоявшегося события. А наличие многолетнего банка данных по грозовой активности в конкретном географическом районе позволяет проектировать системы грозозащиты зданий и определять страховую сумму для имеющихся и строящихся объектов с учетом их возможной поражаемости молнией.
Приближение воздушных судов к грозовому облаку может создать аварийную ситуацию. При поражении самолета молнией выходят из строя системы управления двигателями и оперением. Возникают наводки, нарушающие работу бортовых вычислительных машин, что приводит к непредсказуемым последствиям. Наиболее ответственными этапами полета являются взлет и посадка, которые должны выполняться в безопасных условиях. Поэтому наземным авиационным службам очень важно достоверно определить начало и окончание грозы в районе аэропорта и выдать пилотам соответствующие указания.
Источники информации
1. Кашпровский В.Е. Определение местоположения гроз радиотехническими методами. - М.: Наука. - 1996. - 220 с.
2. SAFIR Total Lightning Localization and Thunderstorm Forecasting System -http://www.vaisala.com/DynaGen_Attachments/Att2751/2751.pdf (прототип).
3. National Lightning Detection Network of Improved Performance from Combined Technology (IMPACT) Radio Frequency Antenna System http://ghrc.msfc.nasa.gov:5721/sensor_documents/NLDN_antenna.html.
4. Murphy M, Zaharescu R, Holle R. Three-dimensional Lightning Mapping Using LDAR II Systems. // Proceedings 26th International conference on lightning protection. Vol. 2. (Krakow, Poland, September 1-6, 2002). - Krakow mining university. - P. 85-90.
5. Панюков А.В., Крохин Н.И., Семагин Б.В., Файзулин Н.А. Однопунктная система местоопределения гроз в ближней зоне. Авторское свидетельство СССР №720384, СССР. Бюллетень изобретений, 1980, №9.
6. Panyukov A.V. Estimation of the location of an arbitrarily oriented dipole under single-point direction finding // Journal of geophysical research. Vol. 101. No D10. P. 14,977-14,982. June 27, 1996 (USA).
7. Панюков А.В., Малов Д.Н. Комплекс программ для сети автономных грозопеленгаторов-дальномеров. Свидетельство РосАПО об официальной регистрации программы для ЭВМ №2002611854. // Программы для ЭВМ. Базы данных. Топологии интегральных микросхем. Официальный бюллетень Российского агентства по патентам и товарным знакам. 1(42) - 2003. С. 57-58.
8. Панюков А.В., Будуев Д.В. Библиотека методов определения местоположения дипольного источника излучения. Свидетельство РосАПО об официальной регистрации программы для ЭВМ №2002610234. //Программы для ЭВМ. Базы данных. Топологии интегральных микросхем. Официальный бюллетень Российского агентства по патентам и товарным знакам. 1(39) - 2002. - С. 149-150.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ МОЛНИЕВЫХ РАЗРЯДОВ | 1999 |
|
RU2152054C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ ЭЛЕКТРОМАГНИТНЫХ СИГНАЛОВ | 2005 |
|
RU2306578C1 |
| БОРТОВОЙ ГРОЗОПЕЛЕНГАТОР-ДАЛЬНОМЕР | 2000 |
|
RU2200963C2 |
| СПОСОБ ОПТИМАЛЬНОГО ОБХОДА ГРОЗЫ | 2005 |
|
RU2316023C2 |
| ОДНОПУНКТОВАЯ СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ ГРОЗ В БЛИЖНЕЙ ЗОНЕ | 2002 |
|
RU2230336C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ГРОЗОВОЙ ОПАСНОСТИ | 1996 |
|
RU2100824C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ РАЗРЯДОВ МОЛНИИ В ЗЕМЛЮ НА ТЕРРИТОРИИ УМЕРЕННЫХ ШИРОТ СЕВЕРНОГО ПОЛУШАРИЯ ЗЕМЛИ | 2006 |
|
RU2332693C2 |
| ОДНОПУНКТОВАЯ СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ ГРОЗ В БЛИЖНЕЙ ЗОНЕ | 2015 |
|
RU2599775C1 |
| Однопунктная система местоопределения гроз в ближней зоне | 1978 |
|
SU720384A1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1201790A1 |
Предлагаемое изобретение может быть использовано в системах управления воздушным движением, в системах сбора и обработки метеорологической информации и т.п. В многопунктовой системе определения местоположения молниевого разряда, содержащей сеть передачи данных и подключенные к ней сенсоры, центральный блок расчетов, блок управления и компьютеры пользователей (по числу пользователей) в качестве сенсоров использованы сверхдлинноволновые автономные грозопеленгаторы-дальномеры. Достигаемым техническим результатом является увеличение вероятности обнаружения молниевого разряда. 1 ил.

Способ определения местоположения молниевого разряда, включающий мониторинг вертикальной составляющей электрического поля и горизонтальной составляющей магнитного поля в нескольких пунктах наблюдения на земной поверхности, в ходе которого в пунктах наблюдения регистрируют моменты времени появления сигналов от молниевых разрядов и определяют оценки пеленгов на разряды, отличающийся тем, что в каждом пункте наблюдения при базовом расстоянии между ними, снимающем ограничения прямой видимости молниевого разряда, и при синхронизации их системных часов по мгновенным значениям сигналов определяют расстояние между данным пунктом наблюдения и молниевым разрядом, индуцирующим данные сигналы, затем результаты измерений направляют на центральный пункт, где идентифицируют их соответствие конкретному грозовому разряду, сопоставляя по времени регистрации, оценкам пеленгов, расстоянию между данным пунктом наблюдения и молниевым разрядом, а также координатам пунктов наблюдения, и по соответствующим конкретному молниевому разряду результатам идентификации и измерений вычисляют координаты его местоположения.
| Фотохромоскоп | 1925 |
|
SU2751A1 |
| Устройство для определения местопо-лОжЕНия гРОз B ближНЕй зОНЕ | 1979 |
|
SU836611A1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1187120A1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ МОЛНИЕВЫХ РАЗРЯДОВ | 1999 |
|
RU2152054C1 |
| БОРТОВОЙ ГРОЗОПЕЛЕНГАТОР-ДАЛЬНОМЕР | 2000 |
|
RU2200963C2 |
| US 5444451 А, 22.08.1995 | |||
| US 4395906 А, 02.08.1983 | |||
| Колосниковый холодильник | 1976 |
|
SU578544A1 |
| US 6388608 В1, 14.05.2002 | |||
| US 6505508 В1, 14.01.2003. | |||

