1
Устройство может быть использовано как в комплексе с радиолокационной аппаратурой, так и автономно - в качестве оперативного средства определения местоположения грозовых очагов, находящихся не дальше 400 км от места нахождения устройства. Наиболее эффективен прибор как оперативное средство изучения грозовой обстановки в районе аэродромов.
Для определения местоположения грозовых очагов в настоящее время применяют радиолокаторы, радиогониометры, радиотехнические приборы, измеряющие фазовые скорости радиоволн на разных частотах, грозорегистраторы, а также метод измерения отнощения амплитуд в полосе поглощения полости волновода «земля-ионосфера и вне ее.
В последнее время сделана попытка приближенного определения местоположения гроз приборами, являющимися комбинацией радиогониометров с амплитудным анализатором.
Широко применяемый радиолокационный метод определения местоположения гроз при всех его положительных качествах не позволяет уверенно отличать ливни от гроз, практически не применим для наблюдения за грозовыми облаками во время обложных дождей и непригоден в местах, окруженных горами.
Определение местоположения грозовых очагов при помощи радиогониометров требует со2
здания сети трех-четырех пунктов пеленгации, отстоящих друг от друга на несколько сот километров. Поэтому моменты наблюдения и передачи информации разделены значительными временными интервалами, что исключает возможность оперативного использования радиогониометров.
Определение расстояний до грозовых очагов по разности фаз на кратных частотах дает ошибки измерений порядка 400 км, что не позволяет воспользоваться этим методом для регистрации близких гроз.
При помощи грозорегистраторов можно приближенно определить расстояние до грозового очага, но направление, по которому он движется, остается неизвестным.
Сравнение амплитуд в полосе поглощения волновода «земля-ионосфера (частота около 2 кГц) и вне ее дает положительные результаты только на расстояниях более нескольких сот километров.
В настоящее время известны устройства для пеленгации гроз, в которых используются отдельно азимутальная и дально.мерная части. Обе части функционируют отдельно, имеют различные входы и работают на различных принципах.
Когда дальномерное устройство построено на методе амплитудной анализации, применяются вертикальные открытые антенны или диполи, регистрирующие электрическую составляющую электромагнитного излучения грозового разряда.
Величина приходящего от грозы сигнала зависит от высоты и места установки антенны; для сопоставления данных при измерениях в разных местах необходимо экспериментально определять пересчетные коэффициенты.
Цель изобретения - повышение точности показаний устройства.
Известно, что существуют два типа грозовых разрядов: наземные и внутриоблачные. Максимум электромагнитного излучения наземных разрядов приходится на частоту 7- 10 кГц, а внутриоОлачных -на Haciory около 100 кГц. На частоте bU к1ц амплитуды наземных и внутриоблачных разрядов одинаковы. Таким образом, для того, чтобы дальномерное устройство одинаково хорошо регистрировало разряды обоих типов, его селективные элементы должны быть настроены на частоту около 60 Ki ц, что и применено в настоящем устройстве.
Азимутальную часть прибора энергетически выгодно настраивать на частоту Ь-10 кГц. для обеспечения достаточного послесвечения на экране электронно-лучевой труоки в данном устройстве выбрана частота 3 кГц.
В настоящем устройстве впервые применен новый метод компоновки блоков азимутов и дальности: приемной частью как азимутальной, так и дальномернои схем являются одни и те же две неподвижные рамочные антенны, установленные во взаимно перпендикулярных плоскостях. Для помехоустойчивости антенны экранированы. Величина сигнала, принимаемая рамочными антеннами, не зависит от высоты и места установки антенн. По этой причине данные дальномерных устройств, полученные в различных местах, не нуждаются в дополнительном сравнении и корректировке.
Предлагаемое устройство для определения местоположения грозовых очагов отличается тем, что входящие в его состав предварительный усилитель и дальномер связаны через дополнительно введенные два фазовращателя и сумматор.
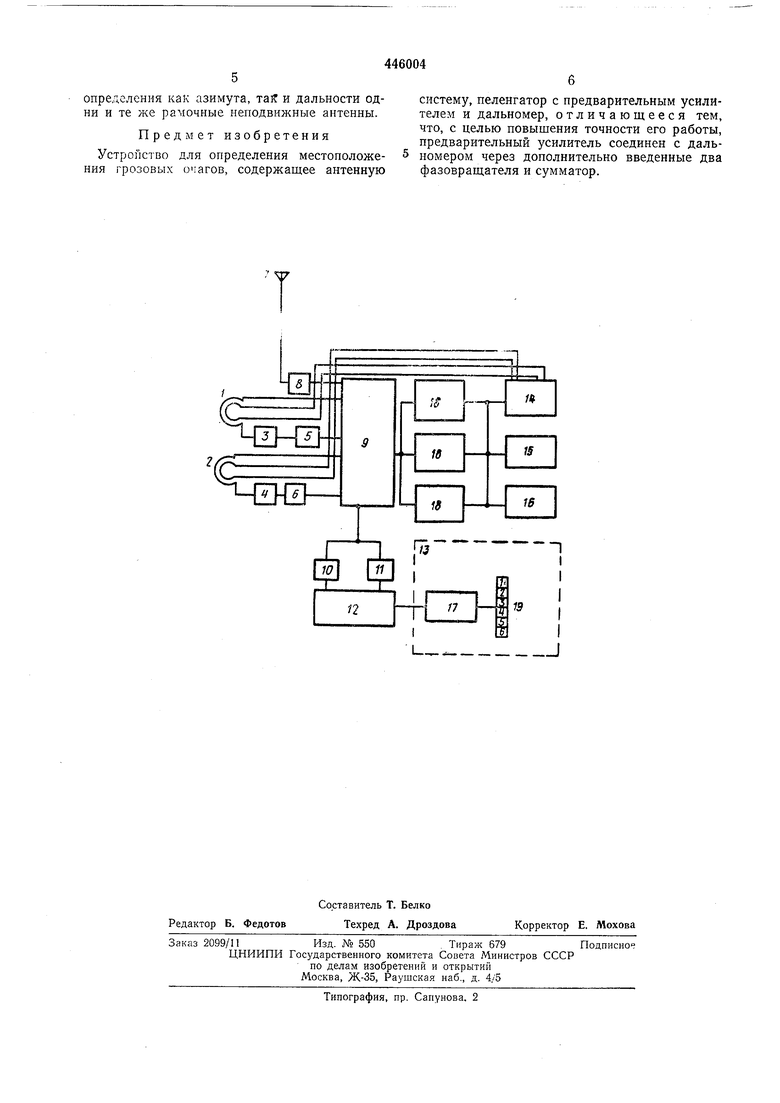
На чертеже изображена блок-схема устройства.
Устройство состоит из двух одинаковых взаимно перпендикулярных рамочных антенн 1 и 2 с фидерами 3, 4 и согласующими трансформаторами 5 и 6, ненаправленной штыревой антенны 7 с фидером 8, предварительного усилителя 9 с резонансными контурами, настроенными на 3 и 60 кГц, соединенного через фазовращатели 10, 11 и сумматор 12 с блоком дальности 13, контрольного генератора 14, индикаторного блока 15, блока питания 16.
Блок дальности имеет анализатор амплитуд 17. Предварительный усилитель 9 соединен с индикаторным блоком 14 через усилитель 18.
Устройство работает следующим образом.
Импульсы от грозовых разрядов наводят в рамочных антеннах электродвижущую силу,пропорциональную углу прихода сигнала. Рамочные антенны ориентированы на направлелия «север-юг и «запад-восток. Сигналы от антенн подаются через фидеры
па вход предварительного усилителя 9. Со вторичных обмоток согласующих трансформаторов импульсы грозовых разрядов поступают раздельно в каналы азимута и дальности. После приема информации и ее усиления на
экране 3Jl1 индикаторного блока получается двунаправленный пеленг.
iia6opoM фазы сигнала от штыревой антенны 7 достигается однонаправленность пеленга на грозу. Дальность до грозового очага регистрируется следующим образом. Электромагнитное излучение грозового разряда, принятое рамочными антеннами, усиливается предварительным усилителем 9. Затем из спектра грозового разряда выделяется составляющая с
частотой 60 кГц. Выбор частоты 60 кГц обусловлен тем, что именно на этой частоте амплитуды внутриоблачных и наземных разрядов одинаковы. Таким образом, блок дальности одинаково регистрирует разряды обоихтииов.
Для получения 1фуговой диаграммы направленности сигналы о г каждой из рамочных антенн (каждый по отдельному каналу) поступают на фазовращатели 10 и 11. В одном из них фаза поворачивается на - 45°, в другом -
на -|- 45. С фазовращателей оба сигнала поступаю1 на сумматор 12.
С выхода сумматора сигнал спектра 60 кГц, не зависящий от направления прихода электромагнитных волн, поступает через анализатор амплитуд Г/ на ждущие мультивибраюры 19, чувствительность каждого из которых
соответствует определенному расстоянию до
грозового очага.
Наименее чувствительный мультивибратор
выдает сигнал «Запрет па более чувствительные, обеспечивая этим самым однозначность индикации дальности по определенным порогам. Необходимые чувствительности ждуЩих
мультивибраторов выбраны в результате статистической обработки многочисленных экспериментальных данных, полученных средствами непосредственных метеорологических наблюдений за местоположением грозовых очагов.
Такая обработка показала, что распределение амплитуд спектра электромагнитного излучения грозового разряда во всех климатических зонах подчиняется одному и тому же
нормально-логарифмическому закону и не зависит от времени года, что и допускает привязку по статистическим соотношениям. Расстояние до грозового очага определяется по принципу оценки амплитуд по определенным
порогам.
Таким образом, применение фазовращателя и сумматора со сдвигом фаз на + 45 с последующим сложением сигналов позволяет получить в дальномерном устройстве круговую
диаграмму направленности и использовать для
определения как азимута, тай и дальности одни и те же рамочные неподвижные антенны.
Предмет изобретения
Устройство для определения местоположения грозовых очагов, содержащее антенную
систему, пеленгатор с предварительным усилителем и дальномер, отличающееся тем, что, с целью повыщения точности его работы, предварительный усилитель соединен с дальномером через дополнительно введенные два фазовращателя и сумматор.

| название | год | авторы | номер документа |
|---|---|---|---|
| Панорамный грозорегистратор | 1979 |
|
SU800939A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОЛНИЕВОГО РАЗРЯДА И МНОГОПУНКТОВАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2253133C2 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1201790A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕН'ИЯ ГРОЗОВОГО РАЗРЯДА | 1971 |
|
SU305434A1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ГРОЗОВЫХ РАЗРЯДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2184983C2 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1187120A1 |
| Фазовый анализатор местоположения гроз | 1984 |
|
SU1223175A1 |
| СПОСОБ ОДНОПУНКТОВОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ГРОЗ | 2001 |
|
RU2212685C2 |
| КРУГОВОЙ ПЕЛЕНГАТОР (ВАРИАНТЫ) | 2006 |
|
RU2319162C9 |
| СПОСОБ ОДНОПУНКТОВОГО МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА АТМОСФЕРИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2090903C1 |
