правлягащего угла, выходы первого и второго нормально открытых ключей соответственно через первый и второй частотные детекторы подключены к первому и второму входам первого блока вычитания, выходы третьего и четвертого нормально открытых ключей соответственно через третий и четвертый частотные детекторы соединены с первым и вторым входами второго блока вычитания, выход первого блока вычитания подключен к первому входу блока определения квадранта, а через первый распределительный блок - к первому и второму входам синхрогеИзобретение относится к приборостроению и может быть использовано для измерения скорости движения изображения подстилающей поверхности напримерэ при аэрофотографировании в компенсаторах скоростного смаза изображения.
Цель изобретения - определение направления движения вектора скорости изображения поверхности,.
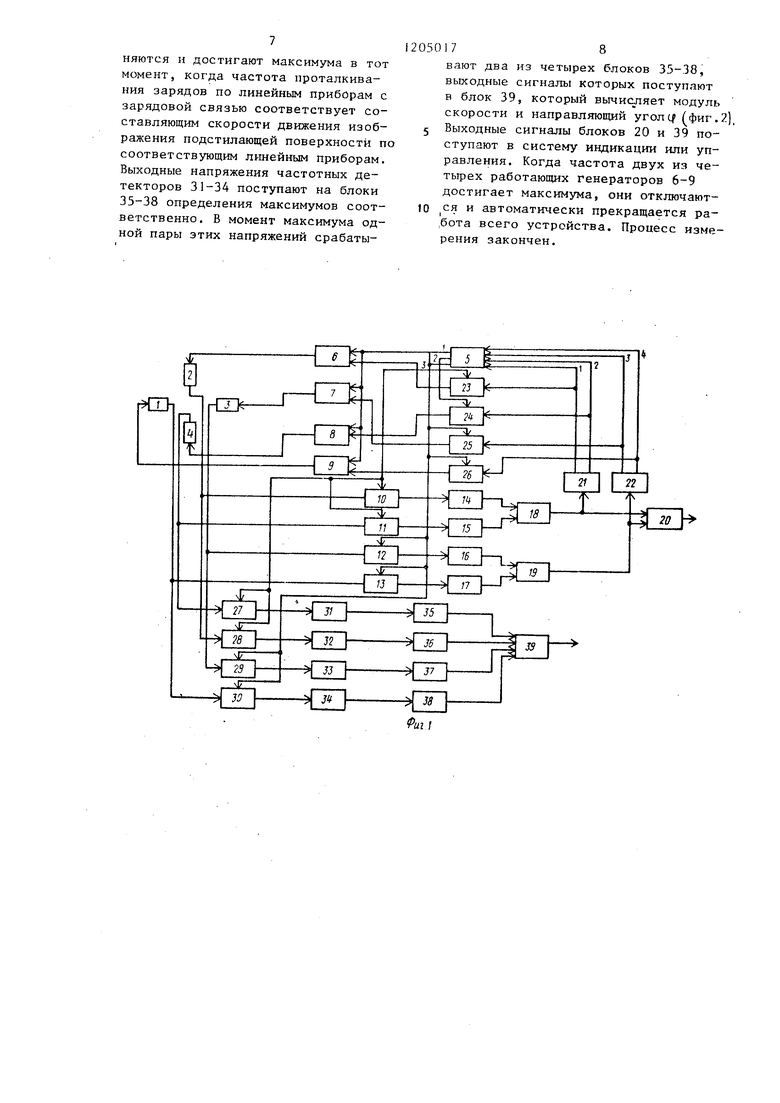
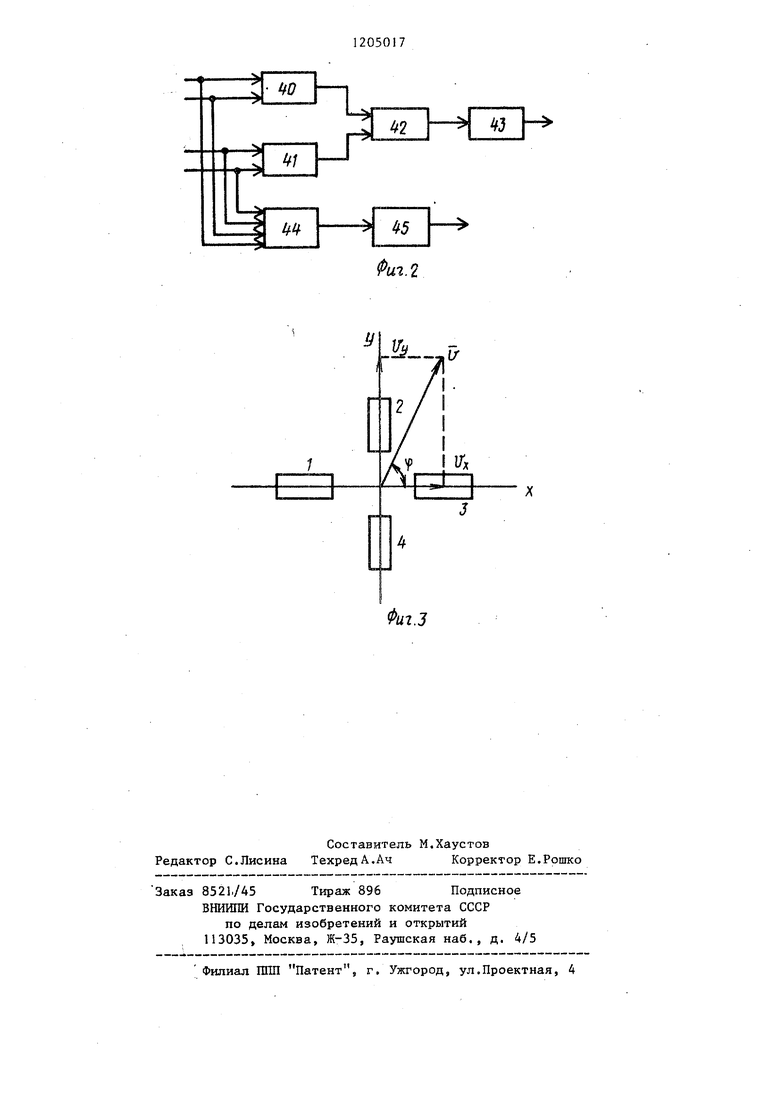
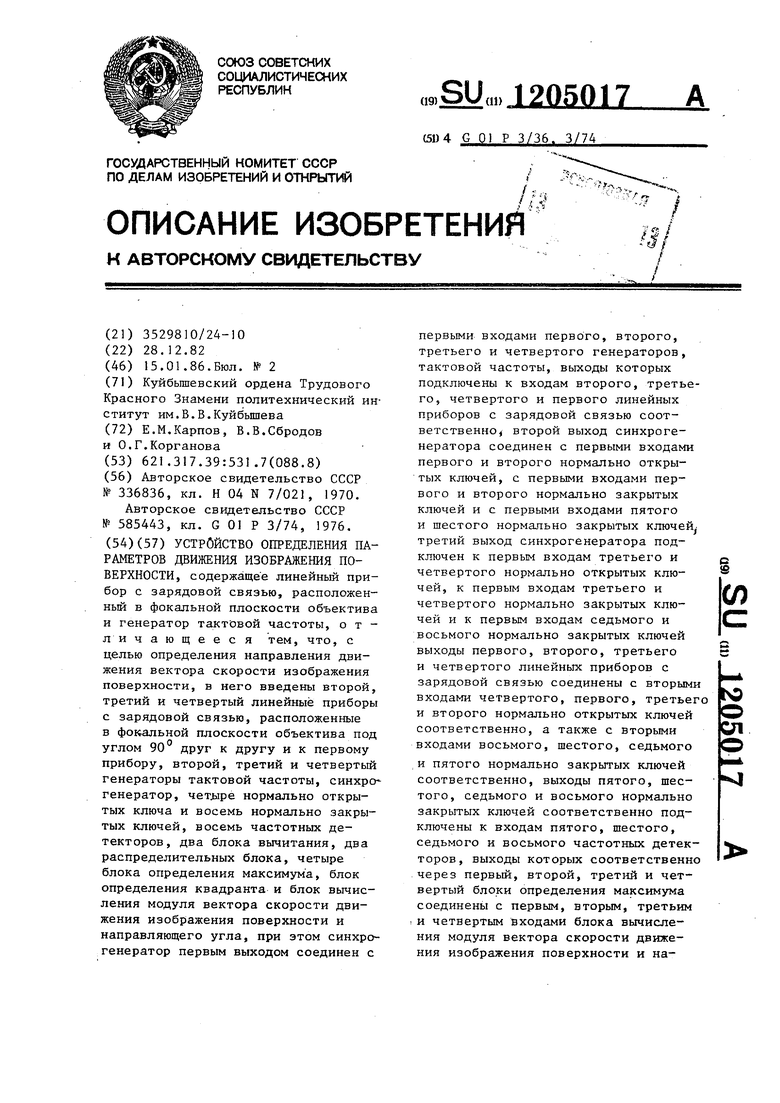
На фиг.1 показана блок-схема предлагаемого устройства; на фиг.2 - схема блока вычисления модуля вектора скорости движения изображения поверхности и направляющего угла; на - прямоугольная система координат , реализуемая четырьмя приборами с зарядовой связью и действие вектора скорости движения изображения подстилающей поверхности в этой системе.
Устройство определения параметров движения изображения поверхности содержит линейные приборы -4 с зарядовой связью, синхрогенератор 5, первый, второй, третий и четвертый генераторы тактовой частоты 6-9 соответственно, первый, второй, третий и четвертый нормально открытые ключи 10-13 соответственно, первый, второй, третий и четвертый частотные детекторы 14-17 соответственно, первый 18 и второй 19 блоки вычитания, блок 20 определения квадранта, первый 2 и второй 22 распре05017
нератора и к вторьм входам первого и второго нормально закрытых ключей, выход второго блока вычитания соединен с вторым входом блока определения квадранта, а через второй распределительный блок - с третьим и четвертым входами синхрогенератора и с вторыми входами третьего и четвертого нормально закрытых ключей, выходы первого, второго, третьего и четвертого нормально закрытых ключей подключены соответственно к вторым входам первого, второго, третьего и четвертого генераторов тактовой частоты.
делительные блоки, первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой нормально закрытые ключи 23-30 соответственно, пя- тый, шестой, седьмой и восьмой частотные детекторы 31-34 соответственно, первый, второй, третий и четвертый блоки 35-38 определения максимума соответственно, блок 39 вычисления модуля вектора скорости движения изображения поверхности и направляющего угла, включающий квадраторы 40 и 4, сумматор 42, блок 43 извлечения квадратного корня, блок
44 определения тангенса , блок 45 реализующий функцию arctg.
Четыре линейных прибора 1-4 с зарядовой связью расположены ортогонально друг другу так, что их
оси совпадают с осями прямоугольной системы координат, расположены они в фокальной плоскости объектива (не показано) и на них проектируется изображение подстилающей поверхности. Синхрогенератор 5 (фиг.1) своим первым выходом соединен с первыми входами первого 6,,второго 7, третьего 8 и четвертого 9 генераторов тактовой частоты, выходы которых соединены с входами второго 2, третьего 3, четвертого 4 и первого 1 линейных приборов с зарядовой связью соответственно. Второй выход синхрогенератора 5 соединен с
первыми входами первого 10 и второго I 1 нормально открытых ключей, с первым входом первого 23 и второго
24нормально закрытых ключей и с первыми входами пятого 27 и шестого 28 нормально закрытых ключей. Третей выход синхрогенератора 5 соединен с первыми входами третьего 12 и четвертого 3 нормально, открытых ключей, с первыми входами третьего
25и четвертого 26 нормально закрытых ключей и с первыми входами седьмого 29 и восьмого 30 нормально закрытых ключей. Выходы первого 1, второго 2, третьего 3 и четвертого 4 линейных приборов с зарядовой связью присоединены к вторым входам четвертого 13, первого 10, третьего 12 и второго 11 нормально открытых ключей соответственно, а также к вторым входам восьмого 30, шестого 28,
седьмого 29 и пятого 27 нормально за рытых ключей соответственно, выходы пятого 27, шестого 28, седьмого 29 и восьмого 30 нормально закрытых ключей соответственно соединены с, входами пятого 31, шестого 32, седьмого 33 и восьмого 34 частотных детекторов, выходы которых соответственно через первый 35, второй 36, третий 37 и четвертый 38 блоки оп- . ределения максимума соединены с первым, вторым, третьим и четвертым входами блока 39 вычисления модуля вектора скорости движения изображения подстилающей поверхности и направляющего угла.. Выходы первого 10 и второго 11 нормально открытых ключей через первый 14 и второй 15 частотные детекторы соединены с первым и вторым входами первого 18 блока вычитания, а выходы третьего 12 и четвертого 13 нормально открытых ключей через третий 16 и четвертый 17 часто ные детекторы соединены с первым и вторым входами второго блока 19 вычитания, выходы первого 18 и второго 19 блоков вычитания присоединены к блоку 20 определения квадранта непосредственно, а также через первый распределительный блок 21 выход первого блока 18 вычитания соединен с первым и вторым входами синхрогенератора 5 и вторыми входами первого 23 и второго 24 нормально закрытых ключей. Через второй распределительный блок 22 выход второго вычитающего блока 19 соединен с третьим и четвертым входами синхрогене-
205017«
ратора 5 и с вторыми входами третьего 25 и четвертого 26 нормально закрытых ключей. Выходы первого 23, второго 24, третьего 25 и четвертого 26 5 нормально закрытых ключей соединены с вторыми входами первого 6, третье- . го 8, второго 7 и четвертого 9 генераторов тактовой частоты соответственно. Определитель квадрантов сос10 тоит из логических схем И и ИЛИ,
а вычислитель модуля вектора скорости движения изображения поверхности и направляющего угла представляет собой специализированный вычисли15 тель, в котором выходы блоков 35-38 определения максимума подключены к блоку 44 определения тангенса (фигЗ) для вычисления направляющего угла и, соответственно, попарно соедине20 ны с первым 40 и вторым 41 квадраторами для вычисления модуля. Выходы квадраторов 40 и 41 через сумматор 42 подключены к блоку 43 извлечения квадратного корня, а выход
25 блока 44 определения тангенса соединен с входом блока 45, реализующего функцию ai ctg.
0
5
0
5
0
5
Устройство работает следующим образом.
В момент измерения синхрогенера- тор 5 вырабатывает первый управляющий импульс, который одновременно запускает генераторы тактовой частоты 6,7,8,9, которые начинают проталкивать заряды в линейных приборах с зарядовой связью 2,3,4,1 соответственно, причем в первом цикле измерения генераторы 6-9 работают в режиме постоянной частоты и проталкивают заряды в каждом линейном приборе 1-4 с зарядовой связью с постоянной скоростью в направлениях от центра прямоугольной системы координат ХОУ. Выходные сигналы с линейных приборов 1-4 с зарядовой связью поступают через нормально от«- крытые ключи 13, 10, 12 и II на частотные детекторы 17, 14, 16, 15 соответственно.
Частотный спектр выходного сигнала каждого прибора с зарядовой связью зависит от соотношения скорости и направления движения изображения подстилающей поверхности, с одной стороны, и скорости проталкивания зарядов, с другой стороны. Так, если вектор скорости движения изображения подстилающей поверхносS
ти имеет направление V (фиг,2), то по линейным приборам с зарядовой связью, расположенным ортогонально изображение перемещается со скоростью V и Vn соответственно. Мак симальная ширина спектра выходного сигнала линейных приборов с зарядовой связью имеет место в том случае, если направление проталкивания зарядов по линейному прибору, расположенному вдоль оси X, совпадает с направлением V) и скорость проталкивания по модулю , а направление проталкивания зарядов по линейному прибору, расположенному вдоль оси У, совпадает с направлением V. и скорость проталкивания по модулю h/yj . Если модуль скорости проталкивания больше или меньше IVJ и соответственно, то ширина спектра сужается. Аналогичн картина имеет место, если направление проталкивания зарядов изменяется на противоп-оложное. Если частот проталкивания зарядов одинакова, ч имеет место в первом цикле измерения, то ширина спектра выходного сигнала зависит только от направления проталкивания.
На выходе частотных детекторов имеют место напряжения, величина которых пропорциональна ширина спетра сигнала, снимаемого с соответствующих приборов с зарядовой связ Эти напряжения попарно подаются на два вычитающих блока 18 и 19, причем на каждый из них поступают напряжения, пропорциональные ширине спектров сигналов, снимаемых с дву приборов с зарядовой связью, распо ложенных соосно. При постоянной скрости проталкивания зарядов по линейным приборам и направлении проталкивания от центра прямоугольной системы координат знак разностного напряжения на выходе каждого из вычитающих блоков 18 и 19 зависит от того, в какой полуплоскости располжен вектор скорости движения изобржения подстилающей поверхности. Ко бинация знаков указьшает квадрант расположения этого вектора. Напряжения с блоков 18 и 19 подаются на блок 20 определения квадранта, а тже на распределительные блоки 2 и 22 соответственно. В зависимости о знака напряжения вычитающего блока 18 распределительный блок 21 включ
г, ю j 0 5
5 0 5
0
5
3
ключи 23 или 24. Одновременно на вход синхрогенератора 5 поступает сигнал, под влиянием которого первый управляющий импульс снимается и вырабатьшается второй управляющий импульс, который проходит через один из открытых ключей 23 и 24 и приводит в работу генераторы 6 или 8 тактовой частоты.
В зависимости от знака напряжения вычитающего блока 19 распределительный блок 22 включает ключи 25 или 26. Одновременно на вход синхрогенератора 5 поступает сигнал, под влиянием которого первый управляю- щий импульс сни1 1ается (в случае, если на выходе блока 18 имеется О и вырабатывается третий управляющий импульс, который проходит через один из открытых ключей 25 или 26 и приводит Б. работу генераторы 7 или 9 тактовой частоть. Одновременно второй и третий управляющий импульс закрьпзают нормально открытые ключи 1013 и открывают нормально закрытые ключи 27-30. На этом первый цикл работы устройства завершен, В результате определен квадрант расположения вектора скорости движения подстилающей поверхности и включены два из четырех генераторов тактовой частоты, которые управляют линейками, расположенными ортогонально и по осям именно этого квадранта.
Начинается второй цикл работы. Под влиянием второго и третьего управляющих импульсов синхрогенератора 5 генераторы тактовой частоты 6 или 8 и 7 или 9 работают в режиме переменной частоты, при котором частота их выходного сигнала изменяется от некоторого минимума до максимума, определяемого верхней границей измеряемых скоростей. В работе принимают участие два прибора с зарядовой связью, расположенные по осям выбранного в предыдущем цикле работы квадранта расположения вектора скорости движения изображения подстилающей поверхности. Это могут быть пары 1-2, или 2-3, или 3-4 или 1-4 приборов с зарядовой связью. Выходные сигналы этих пар через ключи 27-30 поступают на частотные детекторы 31-34, выходные сигналы которых под влиянием изменения частоты генераторов тактовой частоты меняются н достигают максимума в тот момент, когда частота проталкивания зарядов по линейным приборам с зарядовой связью соответствует составляющим скорости движения изображения подстилающей поверхности п соответствующим линейным приборам. Выходные напряжения частотных детекторов 31-34 поступают на блоки 35-38 определения максимумов соответственно. В момент максимума одной пары этих напряжений срабаты12050178
вают два из четырех блоков 35-38, выходные сигналы которых поступают в блок 39, который вычисляет модуль скорости и направляющий уголtf (фиг. 5 Выходные сигналы блоков 20 и 39 поступают в систему индикации или управления. Когда частота двух из четырех работающих генераторов 6-9 достигает максимума, они отключают- 10 ,ся и автоматически прекращается ра- ,бота всего устройства. Процесс измерения закончен.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик скорости движения изображения поверхности | 1989 |
|
SU1700481A1 |
| ВЫСОТОМЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2253880C1 |
| Измеритель скорости движения изображения поверхности | 1989 |
|
SU1705748A1 |
| ВЫСОТОМЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2565608C1 |
| УСТРОЙСТВО ОДНОКРАТНОГО ФОРМИРОВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЯ | 1996 |
|
RU2145154C1 |
| Датчик скорости движения изображенияОб'ЕКТА | 1979 |
|
SU853545A1 |
| УСТРОЙСТВО ОДНОКРАТНОГО ФОРМИРОВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЯ | 1998 |
|
RU2146080C1 |
| Телевизионная камера на приборах с зарядовой связью | 1983 |
|
SU1141589A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ИСКАЖЕНИЙ СИГНАЛОВ ТЕПЛОВИЗИОННОГО ИЗОБРАЖЕНИЯ | 2009 |
|
RU2396728C1 |
| Формирователь сигнала изображения | 1984 |
|
SU1277427A1 |
| ДАТЧИК СКОРОСТИ КОМПЕНСАТОРА СКОРОСТНОГО СМАЗА | 0 |
|
SU336836A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Датчик скорости движущегося изображения поверхности | 1976 |
|
SU585443A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
