Изобретение относится к оптическому и оптико-электронному приборостроению и может быть использовано в спектрофотометрах с периодическим сканированием спектра, а также в других системах автоматического контроля нестационарных параметрических полей.
Цель изобретения - уменьшение энергоемкости, повышение надежное- ти, а также расширение эксплуатационных возможностей устройства при сканировании в заданном телесном . угле.
На фиг.1 изображено сканирующее устройство, общий вид; на фиг.2 - то же, вид сбоку; на фиг.З - электрическая принципиальная схема управления электродвигателем; на фиг.4 - эпюры напряжений в точках электрической схемы, обозначенных на фиг.З; на фиг.З - вращательно- колебательная траектория движения сканирующего луча при отношении амплитуды угла колебательного движения к угловому диаметру сканируемого поля равном четырем.
Устройство состоит из шагового электродвигателя 1, обеспечивающего :импульсное вращение вала, жестко установленной на его валу вилки 2, в подшипниках 3 которой свободно вращается Т-образный стержень 4. Ось X вращения стержня 4 перпендикулярна оси Z вращения вала двигате ля 1, а ось стержня t составляет с осью Z угол 45°, На оси X стержня 4 установлены накладки 5, между которыми болтом 6 жестко зажат выступ 7 зеркала 8, причем отражающая по- верхность зеркала 8 составляет с осью Z требуемый угол, который устанавливается по метке 9 и рискам 10, На вилке 2 установлены кронштейны 11 с упором 12 и 13. На стержне 4с )зозможностью перемещения вдоль оси расположены грузы 14. Упругая жеская пружина 15 одним концом закреплена на вилке 2, а другим - на стержне 4. На вилке 2 укреплены датчи- ки 16 и 17 обратной связи, состоя- 1цие, например, из пар светодиод - фотодиод, а к стержню 4 прикреплена пластинка 18, управляющий включение датчиков 16 и 17, которые включены в схему управления шаговым двигателем. Схема управления двигателем со держит также триггеры 19 и 20, ло
02.2
гические элементы И 21 и 22, логический элемент ИЛИ 23, генератор 24 частоты, синхронизированный с выходом триггера 20 с регулируемой частотой, распределитель 25 импульсов, усилитель 26 мощности и шаговый двигатель 1„ Датчики обратной связи включены в схему управления через токос ьемное устройство 27.
Устройство работает следуюощм образом.
В момент включения напряжения колебательная система, состоящая из зеркала 8, стержня 4 с грузами 14 и пластинкой 18, а также пружины 15, находится в положении равновесия, при этом положение пластинки 18, закрепленной на стержне-45 обеспечивает включение датчика 16, Датчик 16 выдает импульс, и триггер
19устанавливается в состояние логической единицы. Через логический элемент И 21 и логический элемент ИЛИ 23 импульс устанавливает триггер
20в состоянии логической единицы и включает генератор 24, синхронизируя выходную частоту по фазе с началом подаваемого импульса. Через логический элемент И 22 сигнал поступает на распределитель 25 импульсов, далее на усилитель 26 мощности и шаговый двигатель 1, который приходит во. вращательное движение.
В начальный момент колебательная система находится в состоянии покоя. При включении двигателя 1 она приходит во вращательное движение вокруг оси Z вместе с валом двигателя. При этом на грузы -14 действует центробежная сила, которая, деформируя
пружину 15, поворачивает колебательную систему вокруг оси X , Скорость вращения вала двигателя 1 увеличивается до значения, определяющего такую величину центробежной силы, действующей на грузы 14., при которой колебательная система и связанная с ней пластинка 18 поворачиваются вокруг оси X на угол, обеспечивающий срабатывание датчика 17 о
Импульс с датчика 17 через логический элемент ИЛИ 23 перебрасывает триггер 20 в состояние логического нуля, тем самым закрывая схему совпадения, состояшую из логического элемента И 22. Двигатель 1 останавливается, после чего колебатель3
ная система продолжает двигаться по инерции до соударения с упором 12. Далее система совершает колебательное движение вокруг оси X и, двигаясь в обратном направлении, проходит положение равновесия, при этом датчик 16 вьщает импульс, который устанавливает триггер 19 в состояние логического нуля, и логический элемент И 21 не пропускает его. После соударения с упором 13 колебательная система вновь проходит положение равновесия, датчик
16вьщает импульс и схема управлен работает в аналогично описанному.
Однако в положении равновесия система имеет значительную начальную скорость и промежуток времени между срабатыванием датчиков 16 и
17короче, чем в режиме разгона.
я
1205102
За этот промежуток времени, определяемый положением грузов 14 на оси стержня 4, двигатель 1 поворачивает систему вокруг оси Z на требуе5 мый угол.
Таким образом, устройство выполняет сканирование отраженного от зеркала 8 луча по вращательно-коле- бательной траектории с требуемым
10 отношением амплитуды угла колебательного движения к угловому диаметру сканируемого поля, определяемому положениями датчика 17 и упоров 12 и 13.
15 Использование изобретения обес- пепечивает уменьшение энергоемкости, повышение надежности, а также расширение эксплуатационных возможностей устройства при сканировании в
20 заданном телесном угле.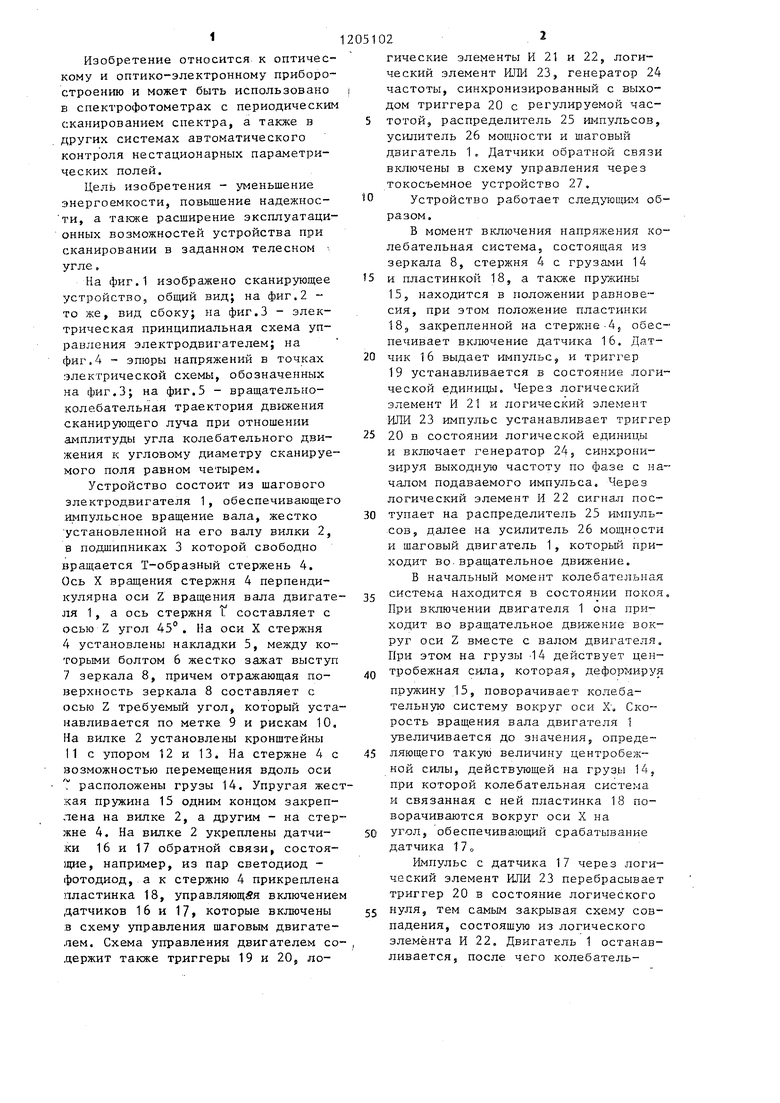

| название | год | авторы | номер документа |
|---|---|---|---|
| Дефлектор | 1984 |
|
SU1176288A1 |
| Система автономного лазерного определения координат БВС без использования модулей GPS/ГЛОНАСС | 2019 |
|
RU2723692C1 |
| УСТРОЙСТВО ДЛЯ ПРЯМОГО ЛАЗЕРНОГО ЭКСПОНИРОВАНИЯ | 2014 |
|
RU2567013C1 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА СКАНИРУЮЩЕГО ЭЛЕМЕНТА | 1988 |
|
SU1841087A1 |
| ТЕЛЕВИЗИОННЫЙ ДАТЧИК КАРТЫ | 1971 |
|
SU299741A1 |
| СПОСОБ ФОРМИРОВАНИЯ МАССИВА МИКРООПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2013 |
|
RU2540727C1 |
| Следящий электропривод | 1985 |
|
SU1259207A2 |
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОГО СМЕЩЕНИЯ ПОЛОСЫ ФИЛЬТРА | 1997 |
|
RU2118800C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |


.2
П /
Х.-Х
16
25
25
Ж
/
г
5
2«
20
1Л
Составитель В.Дринь Редактор А.Огар Техред С .Мигунова Корректор М.Максимишннец
Заказ 8526/49 Тираж 525 Подписное ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Филиал ШШ Патент, г.Ужгород, ул,Проектная, 4
| Патент США № 3532408, кл | |||
| Способ приготовления консистентных мазей | 1912 |
|
SU350A1 |
| РОЛИК КОНВЕЙЕРНЫЙ С ВОЗДУШНЫМ ФИЛЬТРОМ | 2009 |
|
RU2410317C1 |
