Изобретение относится к станко- инструментальной технике, может найти широкое применение при управлении станками с программным управлением, .устройствакш цифровой обработки изображений в сканируютщх установках и т.д. и является усовершенствованием следящего электропривода по авт. св. № 6J5452.
Целью изобретения является повышение быстродействия электропривода
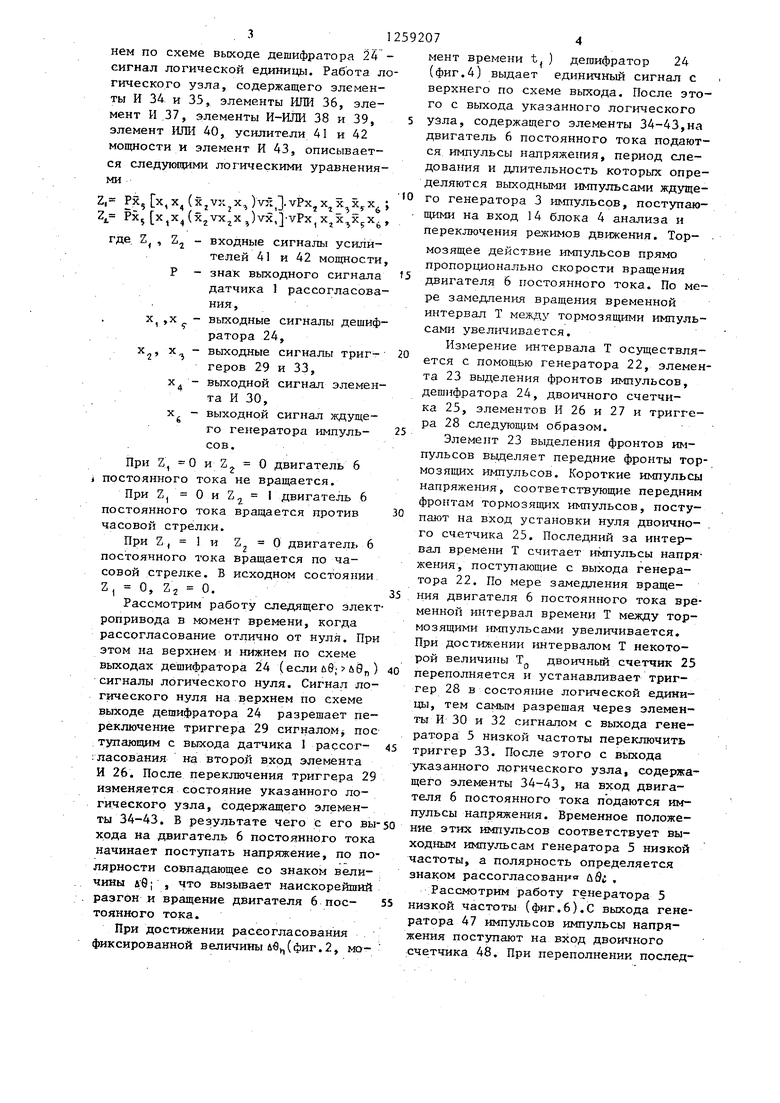
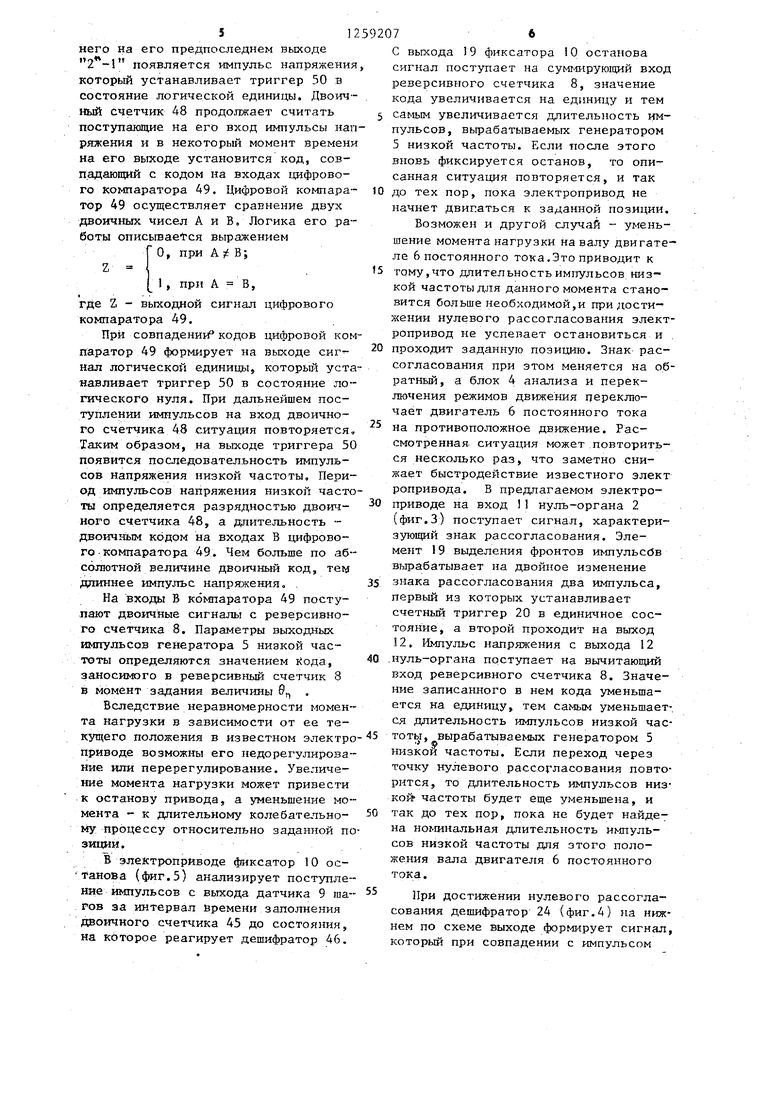
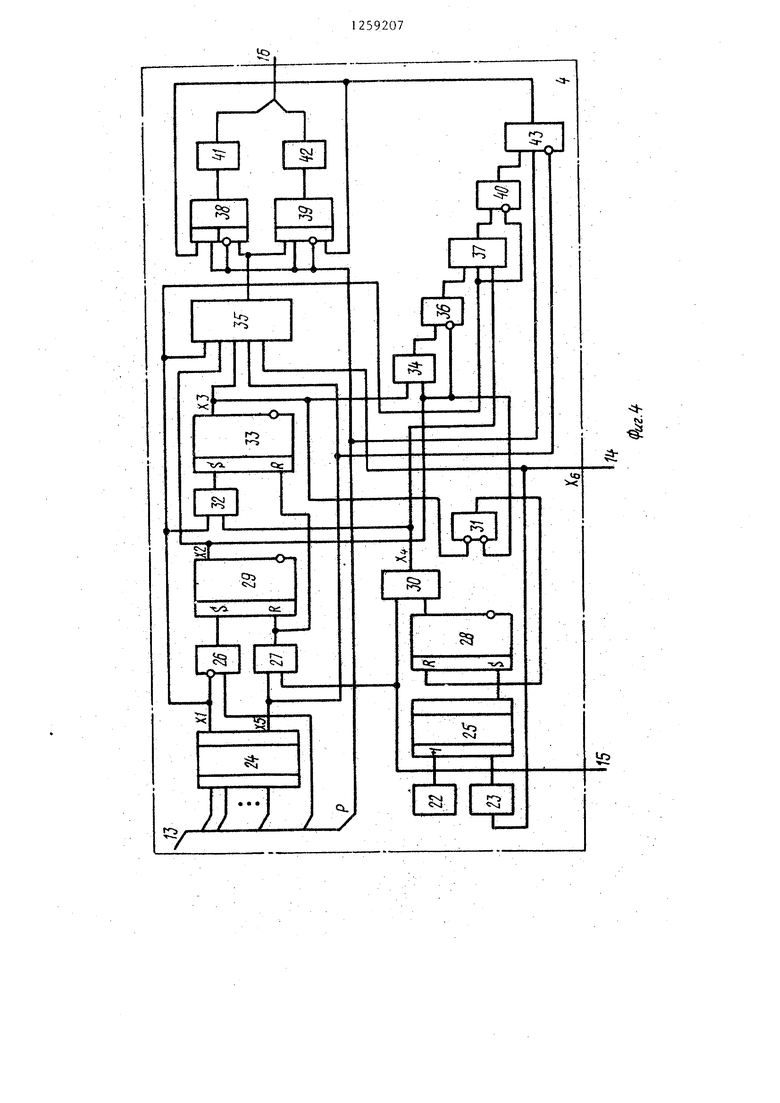
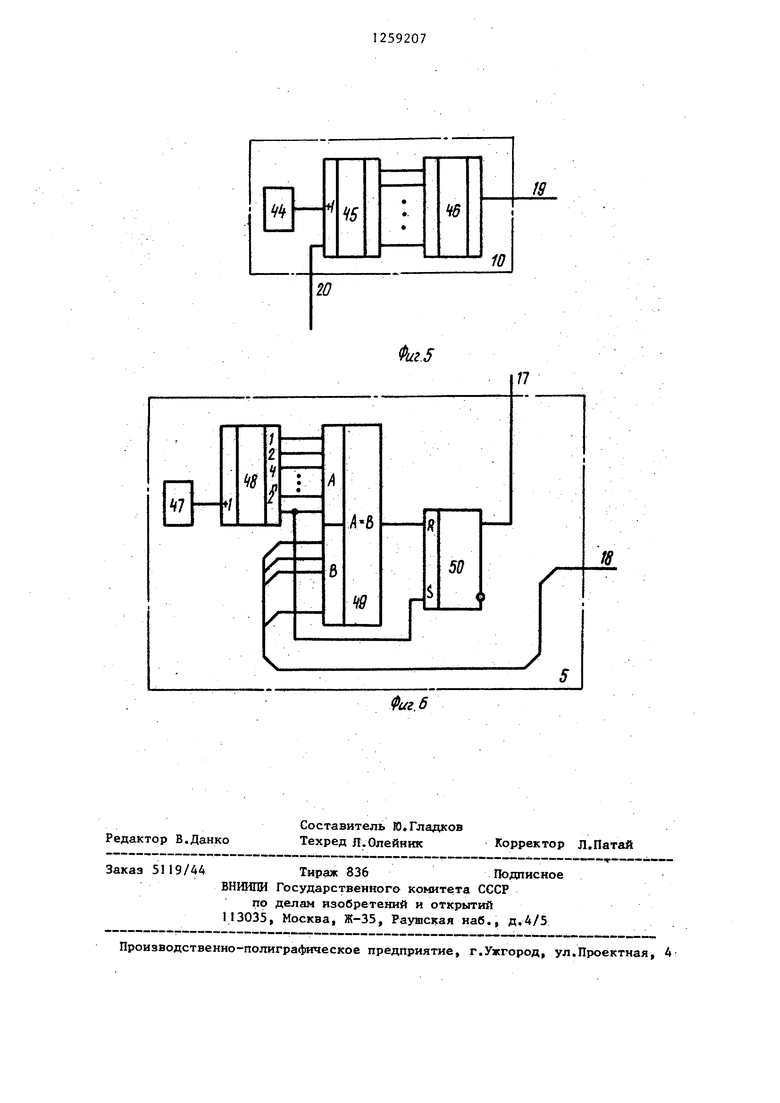
На фиг. 1 приведена блок-схема электропривода; на фиг. 2 - циклограмма работы электропривода; на фиг. 3 - принципиальная схема нуль- органа; на фиг. А - принципиальная схема блока анализа и переключения режимов движения; на фиг. 5 - прин- Шшиальная схема фиксатора останова; на фиг. 6 - принципиальная схема генератора низкой частоты.
Следящий электропривод содержит датчик 1 рассогласования, нуль-
орган 2, ждущий генератор 3 импульсов, блок 4 анализа и переключения режима движения, генератор 5 низкой частоты, двигатель 6 постоянного тока, редуктор 7, реверсивный счетчик 8, датчик 9 шагов, фиксатор 10 останова, вход 11 я выход 12 нуль- органа. 2, первый, второй и третий входа 13715 и выход 16 блока 4 анализа и переключения режимов, вход 17 и выход 18 генератора 5 низкой частоты, элемент 19 выделения фронтов им- пульсов, счетный триггер 20, элемент И 21, генератор 22, элемент 23 выделения фронтов импульсов, дешифратор 24, двоичный счетчик 25, элементы И 26 и 27, триггеры 28 и 29, элементы И 30-32, триггер 33, элементы И 34 и 35, элемент ИЛИ 36, элемент И 37, элементы И-ИЛИ 38 и 39, эле- мейт ШШ 4Q, усилители 41 и 42 мощности, элемент И 43, генератор 44 «вотульсов,двоичный счетчик 45, дё- пшфратор 46, генератор 47 импульсов двоичный счетчик 48, компаратор 49 и триггер 50.,
На фиг,1-6 приняты следующие бук- веиные обозИачения; U - выходной сигнал датчика шагов; х , х - вы- сигналы дешифратора 24; х - выходной сигнал триггера 29; х, - выходной сигнал триггера 33; х - выходной сигнал элемента И 30; х, - выходной сигнал ждущего генератора 3 импульсов; l} - выходной сигнал
5
4 анализа и переключения режима движения или входной сигнал двигателя 6; 9 - заданное расстояние до требуемой позиции; Р - знак рассогласования .
Нуль-орган 2 содержит элемент 19 выделения фронтов импульсов, счетный триггер 20 и элемент И 21 (фиг.З).
Блок 4 анализа и переключения режимов движения содержит генератор 22, элемент 23 выделения фронтов импульсов, дешифратор 24, двоичньгй счетчик 25, элементы И 26 и 27, триггеры 28 и 29, элементы И 30-32, триггер 33,
5 элементы И 34 и 35, элемент ИЛИ 36, элемент И 37, элементы И-ИЛИ 38 и 39, элемент ИЛИ 40, усилители 41 и 42 мощности; элемент И 43 (фиг.4). Фиксатор 10 останова содержит
0 генератор 44 импульсов, двоичный счетчик 45 и дешифратор 46 (фиг.5).
Генератор 5 низкой частоты содержит генератор 47 импульсов двоичный счетчик 48, компаратор 49 и триг5 гер 50 (4мг.6).
Электропривод работает следук)щим образом.
Расстояние до требуемой позиции задается знакопеременной величиной , измеряемой числом шагов датчика 9 иагов (фиг.1). Датчик 1 рассогласования в зависимости от направления вращения двигателя 6 постоянного тока суммирует или вычитает импульсы, поступающие с выхода датчика 9 шагов. Полученная таким образом величина рассогласования Л 9 j поступает в блок 4 анализа и переключения режимов движения. На вход нуль- органа 2 поступает сигнал, характе ризующий знак Р рассогласования Аб; . В блоке 4 анализа и перр.клк чения режимов движения (фиг.4) сигнап рассогласования поступает на вход дешиф5 ратора| 24, имеющего следующую функцию переключений
0 0
0
О,прибЭ; й9„;
1 ,при 4 9; iae ,
1 ,при U 9; О;
О,при u9; О,
(
55
где И - некоторая заданная пороговая величина.
В исходном состоянии, т.е. когда рассогласование отработано, триггеры 28, 29 и 33 находятся в состоянии логического нуля, а на верхнем и нижнем по схеме выходе дешифратора 24 - сигнал логической единицы. Работа логического узла, содержащего элементы И 34 и 35, элементы ИЛИ 36, элемент И 37, элементы И-ИЛИ 38 и 39, 5 элемент ИЛИ 40, усилители 41 и 42 мощности и элемент И 43, описывается следующими логическими уравнениями
, Pic, х,х, (, )vxJ.vPx,,x ; PiJx,x {x2VXjXjvx, vPx,.,
где. Z , Z - входные сигналы усилителей 41 и 42 мощности, Р - знак выходного сигнала 5 датчика 1 рассогласования,
х,х - выходные сигналы дешифратора 24, X , X - выходные сигналы триг- 20
геров 29 и 33, х - выходной сигнал элемента И 30,
X - выходной сигнал ждуще25
го reitepaTOpa импульсов.
При Z, 0 и Z О двигатель 6 постоянного тока не вращается.
При Z, О и Z 1 двигатель 6 постоянного тока вращается против 30 часовой стрелки.
При Z, 1 и Z О двигатель 6 постоянного тока вращается по часовой стрелке. В исходном состоянии Z, О, Zj 0.35
Рассмотрим работу следящего электропривода в момент времени, когда рассогласование отлично от нуля. При этом на верхнем и нижнем по схеме выходах дешифратора 24 (если ) 40 сигналы логического нуля. Сигнал логического нуля на верхнем по схеме выходе дешифратора 24 разрешает переключение триггера 29 сигналом пос тупающим с выхода датчика 1 рассог- 45 гласования на второй вход элемента И 26. После переключения триггера 29 изменяется состояние указанного логического узла, содержащего элементы 34-43. В результате чего с его вы-50 хода на двигатель 6 постоянного тока Начинает поступать напряжение, по полярности совпадающее со знаком величины 491 , что вызывает наискорейший разгон и вращение двигателя 6 пос- 55 тоянного тока.
При достижении рассогласования фиксированной величины Д5|,(фиг. 2, мо5
5
0
5
мент времени t ) дешифратор 24 (фиг.4) выдает единичный сигнал с верхнего по схеме выхода. После, этого с выхода указанного логического узла, содержащего элементы 34-43,на двигатель 6 постоянного тока подаются импульсы напряжется, период следования и длительность которых определяются выходными и myльcaми ждущего генератора 3 ш тульсов, поступающими на вход 14 блока 4 анализа и переключения режимов движения. Тор- мозящее действие импульсов прямо пропорционально скорости вращения двигателя 6 постоянного тока. По мере замедления вращения временной интервал Т между тормозящими импульсами увеличивается.
Измерение интервала Т осуществляется с помощью генератора 22, элемента 23 выделения фронтов импульсов, дешифратора 24, двоичного счетчика 25, элементов И 26 и 27 и триггера 28 следующим образом.
Элемент 23 выделения фронтов импульсов выделяет передние фронты тормозящих импульсов. Короткие импульсы напряжения, соответствующие передним фронтам тормозящих и myльcoв, поступают на вход установки нуля двоичного счетчика 25. Последний за интервал времени Т считает импульсы напряжения, поступающие с выхода генератора 22. По мере замедления вращения двигателя 6 постоянного тока временной интервал времени Т между тормозящими импульсами увеличивается. При достижении интервалом Т некоторой величины Тд двоичный счетчик 25 переполняется и устанавливает триггер 28 в состояние логической единицы, тем самым разрешая через элементы И 30 и 32 сигналом с выхода генератора 5 низкой частоты переключить триггер 33. После этого с вькода указанного логического узла, содержащего элементы 34-43, на вход двигателя 6 постоянного тока подаются импульсы напряжения. Временное положение этих импульсов соответствует выходным импульсам генератора 5 низкой частоты, а полярность определяется знаком рассогласования u9j .
Рассмотрим работу генератора 5 низкой частоты (фиг.6).С выхода генератора 47 импульсов импульсы напряжения поступают на вход двои гного счетчика 48. При переполнении последнего на его предпоследнем выходе
2 -1 появляется импульс напряжения который устанавливает триггер 50 в состояние логической единицы. Дво:нч- ный счетчик 48 продолжает считать поступающие на его вход импульсы напряжения и в некоторый момент времени на его выходе установится код, совпадающий с кодом на входах цифрового компаратора 49. Цифровой компаратор 49 осуществляет сравнение двух двоичных чисел А и В, Логика его работы описьгоаеТся выражением 0, при А В; 1 , при А в,
где Z - выходной сигнал цифрового компаратора 49.
При совпадении кодов цифровой компаратор 49 формирует на выходе сиг нал логической единигцз., который устанавливает триггер 50 в состояние логического нуля. При дальнейшем поступлении имнульсов на вход двоичного счетчика 48 ситуация повторяется. Таким образом, на выходе триггера 50 появится последовательность импульсов напряжения низкой частоты. Период импульсов напряжения низкой частоты определяется разрядностью ного счетчика 48, а длительность - двоичным кодом на входах В цифрового -компаратора 49. Чем больше по абсолютной величине двоичный код, тем длиннее импульс напряжения. .
На входы В компаратора 49 поступают двоичные сигналы с реверсивного счетчика 8. Параметры выходных импульсов генератора 5 низкой частоты определяются значением , заносимого в реверсивный счетчик 8 в момент задания величины б, .
Вследствие неравномерности момента нагрузки в зависимости от ее текущего положения в известном электро приводе возможны его недорегулирова- ние или перерегулирование. Увеличение момента нагрузки может привести к останову привода, а уменьшение момента - к длительному колебательно- fy процессу относительно заданной по зиции.
в электроприводе фиксатор 10 ос- Танова (фиг.5) анализирует поступление импульсов с выхода датчика 9 шагов за интервал времени заполнения двоичного счетчика 45 до состояния, на которое реагирует дешифратор 46.
12592076
С выхода 19 фиксатора 10 останова
сигнал поступает на суммирующий вход реверсивного счетчика 8, значение кода увеличивается на единицу и тем 5 самым увеличивается длительность импульсов, вьфабатываемых генератором 5 низкой частоты. Если после этого вновь фиксируется останов, то описанная ситуация повторяется, и так
0 до тех пор, пока электропривод не начнет двигаться к заданной позиции. Возможен и другой случай - уменьшение момента нагрузки на валу двигателе 6 постоянного тока,Это приводит к
5 тому,что длительность импульсов низкой частоты для данного момента становится больше необходимой,и при достижении нулевого рассогласования электропривод не успевает остановиться и ,
0 проходит заданную позицию. Знак рассогласования при этом меняется на обратный, а блок 4 анализа и переключения режимов движения переключает двигатель 6 постоянного тока
5 на противоположное движение. Рассмотренная ситуация может повториться несколько раз, что заметно снижает быстродействие известного злект ропривода. В предлагаемом электро0 приводе на вход 1I нуль-органа 2
(фиг.З) поступает сигнал, характеризующий знак рассогласования. Элемент 19 выделения фронтов Ш ШульсОв вырабатывает на двойное изменение
5 знака рассогласования два импульса, первый из которых устанавливает счетный триггер 20 в единичное состояние, а второй цроходит на выход 12. Импульс напряжения с выхода I2
0 .нуль-органа поступает на вычитающий вход реверсивного счетчика 8. Значение записанного в нем кода уменьшается, на единицу, тем самым уменьшается длительность импульсов низкой час45
50
55
тоты, вырабатываемых генератором 5 низкой частоты. Если переход через точку нулевого рассогласования повторится, то длительность импульсов низкой- частоты будет еще уменьшена, и так до тех пор, пока не будет найдена нo щнaльнaя длительность импульсов низкой частоты для этого положения вала двигателя 6 постоянного тока.
При достижении нулевого рассогласования дешифратор 24 (фиг.4) на нижнем по схеме выходе формирует сигнал, который при совпадении с импульсом
низкой частоты, поступающим с входа 15, устанавливает триггеры 29 и 33, а также триггер 28 через элемент И 31 с инверторами на входах в нулевое состояние. При этом логический узел, содержащий элементы 34-43,снимает напряжение с входа двигателя 6 постоянного тока.
Таким образом, предпагаемый следя- ва и реверсивный счетчик, соединенный выходом с управляющим входом ге нератора низкой частоты, а входами с выходами нуль-органа и фиксатора останова, подключенных входами к вы ходам соответственно датчика рассог ласования и датчика шагов.
щий электропривод имеет возможность самонастраиваться на оптимальную длительность импульсов низкой частоты при движении в непосредственной близости от заданной позиции, что снижает требования к его настройке и знаU U LJ
0Ut.2
чительно повьЕпает скорость отработки рассогласования.
Формула изобретения
Следящий электропривод по авт.св. № 615452, отличающий с я ; тем, что, с целью повьппения быстродействия, в нем дополнительно установлены нуль-орган, фиксатор останова и реверсивный счетчик, соединенва и реверсивный счетчик, соединенный выходом с управляющим входом генератора низкой частоты, а входами - с выходами нуль-органа и фиксатора останова, подключенных входами к выходам соответственно датчика рассогласования и датчика шагов.
Фиг.
Фиг.З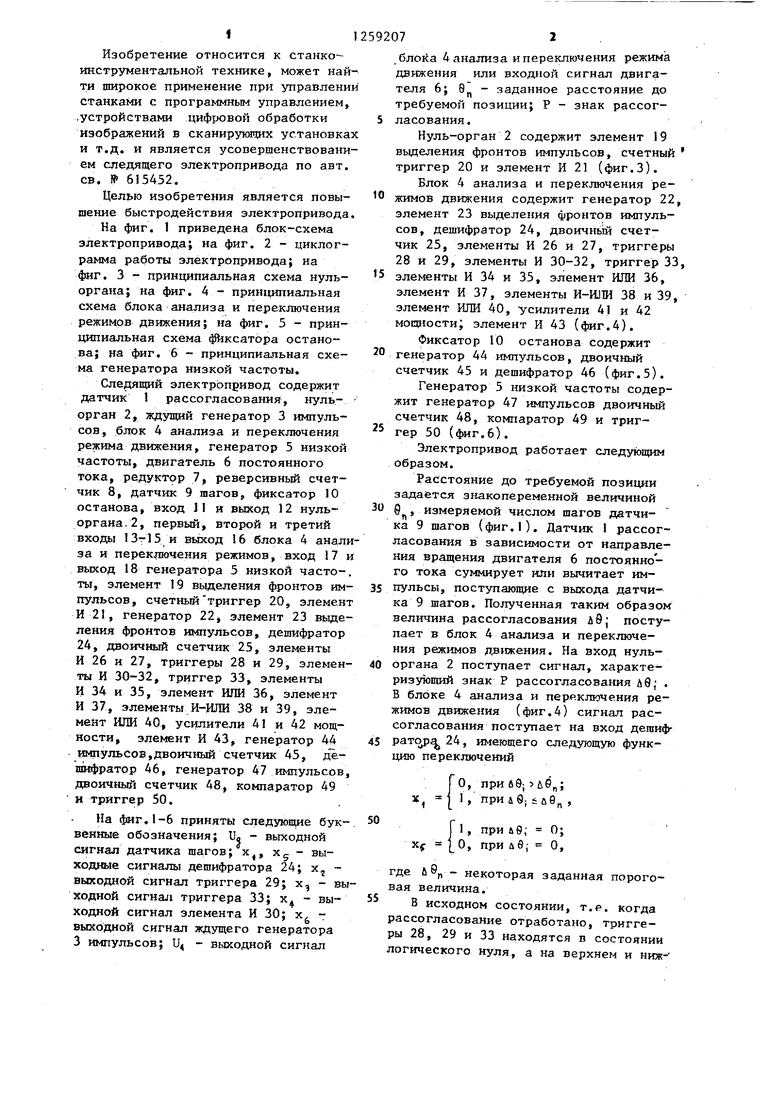
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Устройство для компенсации реактивной мощности | 1990 |
|
SU1746463A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство для измерения угла сдвига фаз | 1990 |
|
SU1789939A1 |
| Дискретный электропривод | 1978 |
|
SU911456A1 |
| ЧАСТОТНО-ФАЗОВЫЙ ДИСКРИМИНАТОР | 2010 |
|
RU2428785C1 |
| Цифровой электропривод | 1982 |
|
SU1050077A1 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
Изобретение относится к области станкоииструментальной техники, может найти широкое применение при управлении станками с программным управлением, устройствами цифровой обработки изображений в .сканирукнцих установках и т.д. и я.шяется усовершенствованием известного следящего электропривода по а.с. № 615452. В электроприводе решается задача управления в зависимости от момента нагрузки и ее текущего положения.При решении этой задачи на вход измерителя датчика рассогласования подается знакопеременная величина, характеризующая расстояние до требуемой позиции, измеренной числом единичных шагов шагового датчика. Эта величина сравнивается с выходным сигналом шагового датчика. Сигнал рассогласования подается на один из входов блока анализа и переключения режимов движения, на осталыгые входы которого подаются сигналы с выходов ждущего генератора импульсов и генератора низкой частоты и который формирует сигнал управления. Сигнал управления подается на вход двигателя постоянного тока, вал которого через редуктор кинематически связан с нагрузкой и шаговым датчиком. Выходной сигнал шагового датчика поступает на управляемый вход ждущего генератора импульсов. Кроме того, генератор низ кой частоты выполнен управляемым.На его управляющий вход подается выходной сигнал реверсивного счетчика.На входы реверсивного счетчика подаются сигнал, пропорциональный знаку рассогласования, и сигнал с выхода фиксатора останова электродвигателя. 6 ил. сл К)
Редактор В.Данко
Составитель Ю.Гладков
Техред Л.0лейник Корректор Л.Патай
Заказ 5119/44Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская иаб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Следящий электропривод | 1976 |
|
SU615452A1 |
| С, 05 В 11/14, 1976 | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
