%(.) ./)Р,
i 1 - И) - ()Y-п ; (-)- i(/)
где , а, т и фо - постоянные величины, а Ь гит, (R) -заданные функции.
В известных интеграфах одна из кареток прибора снабжена обводным штифтом, перемеш;аемым по кривой /(ф), а вторая имеет иптегрируюшее колесико и пишуо ий орган для вычерчивания требуемой интегральной кривой R((f). В предлагаемом приборе, рама интеграфа имеет дополнительно третью каретку, подвижную относительно рамы в направлении, перпендикулярном направлению перемешения основных ка-. реток, и несущую сменные лекала, очерченные по кривым (г) и т (/) и связанные как непосредственно с кареткой, снабженной обводным штифтом, так с кареткой, несущей пишущий орган, посредством подвижного относительно нее стержня, образующего синусный или тангенсный механизм с рычагом, поворачивающим интегрирующее колесико в плоскости вычерчиваемой кривой. Увеличение числа степеней свободы механизма, достигаемое введением третьей каретки, расширяет круг решаемых интеграфом задач и делает возможным использование его в качестве интегриметра.
№ 120653
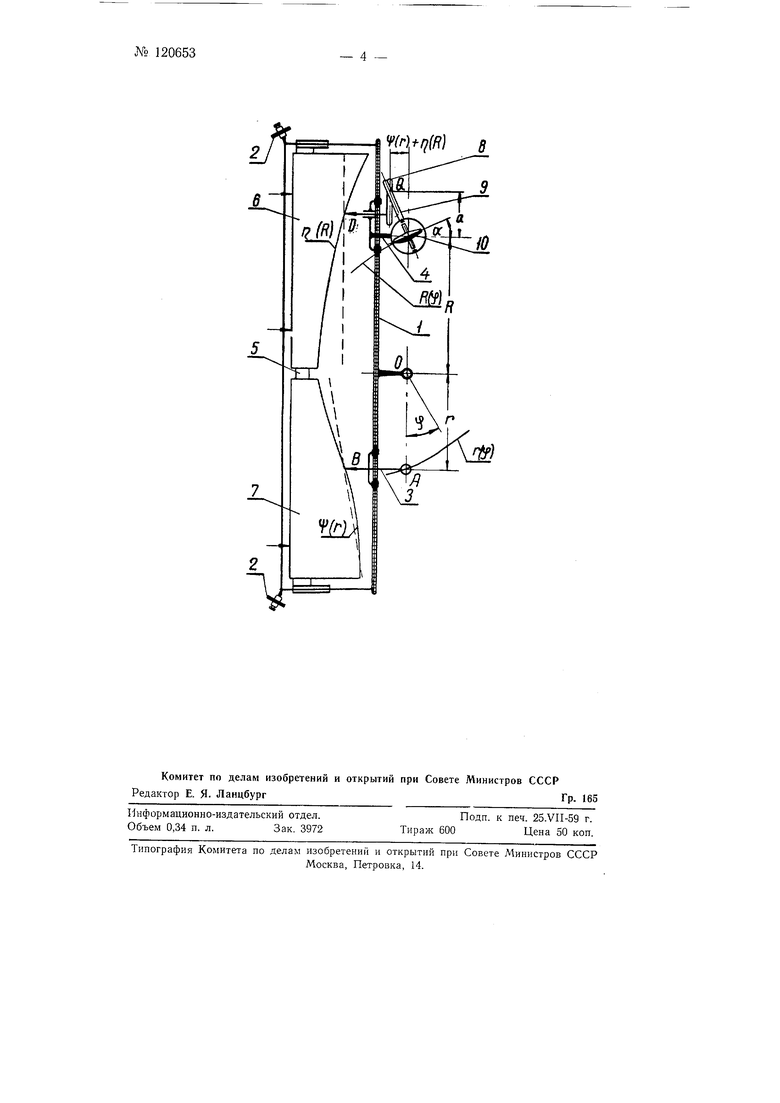
Принципиальная конструктивно-кинематическая схема интеграфа, изображена на чертеже. Интеграф представляет собой раму /, вращающуюся на колесиках 2 вокруг оси, проходящей через точку О нормально к плоскости рисунка, с каретками 3 к 4, перемещающимися относительно рамы, и -подвижной кареткой 5, несущей лекала 6 и 7, очерченные по кривым -rj () и j (г) и прижимаемые постоянно в точке В к стержню обводной каретки 3, а в точке D к Г-образному стержпю 8, который может перемещаться относительно каретки 4 в направлении перемещения каретки 5 и образует с рычагом д синусный или тангенсный механизм в зависимости от того, к первому или второму рычагу прикрепляется щарнир с кулисой Q. Рычаг 9 связан с интегрирующим колесом 10 так, что поворот рычага 9 на угол « вызывает поворот плоскости колеса на такой же угол. Ось рычага 9 может составлять с осью колеса JO произвольный постоянный угол Р.
При обводе данной кривой г(ф) штифтом Л каретки 3 и перемещении ее на Аг Г2-п точка В штифта перемещает лекало 7, а с ней и каретку 5 на величину Д 4 ( (Г2)- (г,).
Дифференциальное приращение функции вычерчиваемой кривой (ф) ( в случае полярного интеграфа) dR ig(a + ) ... (1) где (a+ip)-текущий угол между плоскостью интегрирующего колеса и направлением перемещения несущей его системы.
При тангенсной схеме настройки, имея ввиду, что tga -- - -
tgP m const, после элементарных преобразований и интегрирования соотношения (1) получается выражение
д-г ()() + (r)mr,(Ri
%k
При этом, например, еслит, (R const и Р О, то R RO ехр. -
J г (ср) rf ср т. е. прибор вычерчивает логарифмические спирали.
.М/ + - (/)
При синусной схеме настройки, когда -:-L где
b - const - расстояние от центра интегрирующего колеса 10 до геометриче|:кой оси щарнира Q, несложные преобразования и интегрирование соотношения (1) приводят к интегралу
/ + Г iill±- + + (R ,
0 у 1 -(,(Rir--m .г)-г, (R) допускающем ряд практически интересных частных случаев.
Действие прибора в качестве интегриметра обеспечивается закреплением каретки 4 относительно рамы /. Численные значения интеграла производной функиции получаются при этом, как обычно, в виде угла поворота интегрирующего колеса. Подинтегральная комбинация производных функций определяется типом настройки прибора.
Замена интегрирующего колеса соответственно ориентированным дериватором позволяет по данной интегральной кривой R(f) и данным т, ф (г) и f (R) строить соответствующие приближенные производные кривые, связанные с данными величинами зависимостью, определяемой типом настройки прибора.
Предмет изобретения
Полярный интеграф для вычерчивания по заданной функции (ф) кривой /(ф) определяемой соотношением
г ( ) (R) + am
К( Ко + Г Т7777: ® или
J а -wO (г)-те т, (/)
f (/)- 1 - M-- i()Pd,,
- / (ф) + п /- --
J 1/ 1 1.г) + щ{1)Г-т i С-) + |(/)
где , а, т и сро - постоянные величины, а (г) и (R) -заданные функции, выполненный в виде новоротной вокруг полюса рамы, несущей каретки, одна из которых снабжена обводным штифтом, перемещаемым по кривой (ф), а вторая имеет интегрирующее колесико и пишущий орган для вычерчивания требуемой интегральной кривой R R((f), отличающийся тем, что, с целью расширения круга решаемых интеграфом задач и возможности использования его в качестве интегриметра, рама его несет дополнительную третью каретку, подвижную относительно рамы в направлении, перпендикулярном направлению перемещения основных кареток, и скрепленную со сменными лекалами, очерченными по кривым г 0 (г) и (R) и взаимодействующими с кареткой, несущей обводной штифт, и с подвижным относительно каретки, несущей пишущей орган, стержнем, образующим (Синусный или тангенсный меха. низм с рычагом, поворачивающим интегрирующее колесико в плоскости вычерчиваемой кривой.
- 3 -№ 120653
ff(R) 8
| название | год | авторы | номер документа |
|---|---|---|---|
| Вводное устройство функции у (Х+-t) с отклоненным аргументом t для функциональных интеграфов | 1957 |
|
SU113488A1 |
| Интеграф | 1949 |
|
SU97011A1 |
| ФУНКЦИОНАЛЬНЫЙ ИНТЕГРИМЕТР | 1968 |
|
SU212562A1 |
| Функциональный дифференцио-интеграф | 1955 |
|
SU118616A1 |
| Интегриметр | 1954 |
|
SU103377A1 |
| Интегриметр | 1948 |
|
SU84993A1 |
| Радиальный интегриметр | 1954 |
|
SU102756A1 |
| Прибор для гармонического синтеза | 1955 |
|
SU115898A1 |
| Интегриметр | 1948 |
|
SU78537A1 |
| Интегратор | 1949 |
|
SU93267A1 |