Известны интеграфы, содержащие цилиндр, поворачивающий вокруг оси иа угол, значение которого функционально зависит от перемещения интеграфа, и приводящий во вращение колесико с острой кромкой, и подвижное лекало, перемещающее механизм, обеспечивающий поворот колесика в функции синуса или тангенса от аргумента, пропорционального перемещению стержня, скользящего по лекалу.
Предлагаемый интеграф oтv ичaeтcя от известных тем, чтО каретка, несущая колесико и снабженная пишущим устройством, выполнена подвижной вдоль оси цилиндра.
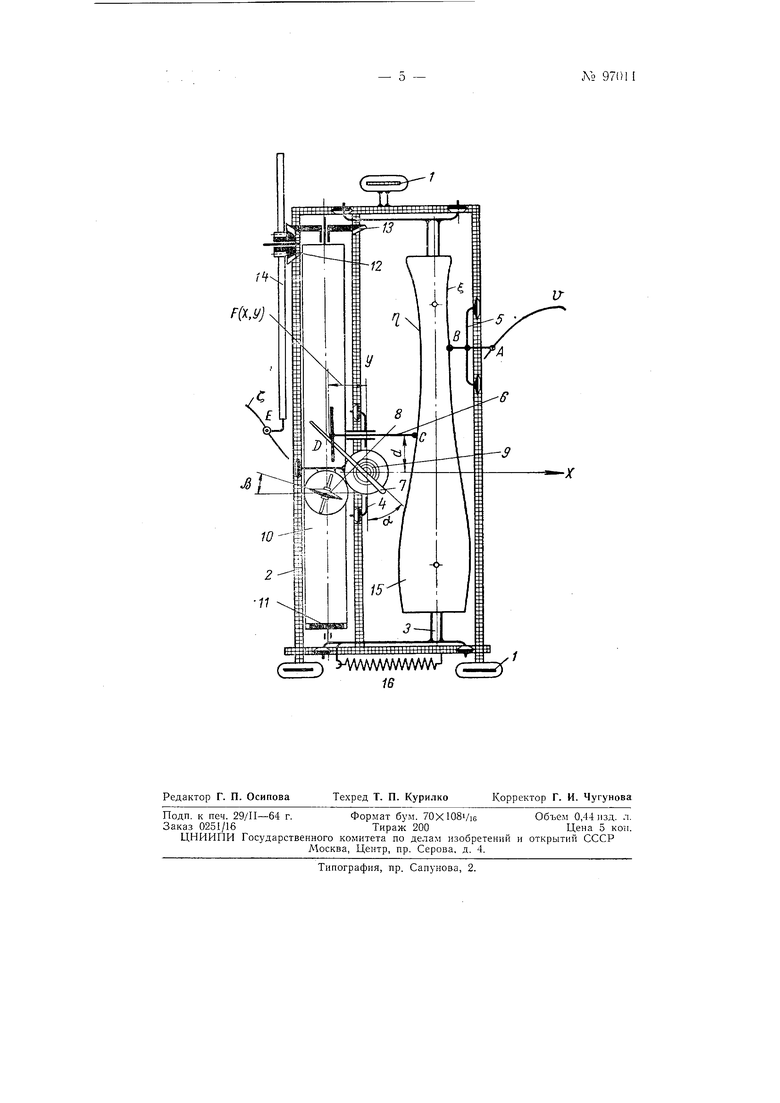
Схема предлагаемого интеграфа изобран ена на чертеже.
Параллельно плоскости чертежа в направлении оси X может двигаться на роликах / каретка 2 относительно которой, в свою очередь, могут двигаться: каретка 3 в направлении оси Х каретка 4 в направлении оси У и каретка 5, в направлении оси V.
Относительно каретки 4 в направлении оси X может двигаться Т-образиый стержень 6, образующий в совокупности со стержнем 7 синусный или тангенсный механизм в зависимости от того, закреплен ли щтифт D на стержне 7 или на стержне 6.
Со стержнем 7 связана обойма, несущая колесико 5 с острой кpo rкой, плоскость которого перпендикулярна плоскости чертежа, таким образом, что когда последний составляет с осью У угол а, то плоскость колесика составляет с осью X угол р а ± у. Угол у может быть установлен произвольно и остается постоянным в процессе действия прибора. Штифт D либо скользит по прорези, либо посредством волоска 9 постоянно прижимается к соответствующей направляющей. Таким образом положение стержня 6 однозначно определяет величину угла р. Кромка колесика 8 постоянно прижи мается к образующей щлифованного цилиндра 10, параллельной оси У и плоскости чертежа.
№ 97011- 2 -
Поворот цилиндра 10 вокруг своей оси на угол ат вызывает поворот колесика 8 вокруг своей оси на угол, обратно пропорциональной cos (3. Если при этом момент силы трения скольжения кромки колесика 8 больше суммарного момента трения качения того же колеснка и сил, препятствующих поступательному перемегцению каретки 4, то поворот цилиндра на угол кг вызовет перемещение каретки 4 на величину dy ат tg р нри одновременном качении колесика 8 по поверхности цилиндра 10.
Угловое перемещение цилиндра W пропорционально величине линейного перемещения dx каретки 2, что достигается с помощью щестерни //, копцентрично прикреплеппой к цилиндру 10 и сцепленной с рейкой (на чертеже не показана), укрепленной на плоскости, относительно которой перемещается каретка 2.
При помощи системы щестерен 12-13 поворот с1т цилиндра 10 может быть сделан пропорциональным линейному перемещению стержня 1/4 в нанравлении оси У. Следовательно, если нри перемещении каретки 2 в направлении оси X щестерня // сцеплена с рейкой, то каретка 4 переместится в направлении оси Y па величину
у
где: k - коэффициент, зависящий от соотнощения размеров деталей.
Если же щестерню 11 вывести из зацепления, а при перемещении каретки 2 в нанравлении X одновременно обводить щтифтом Е стержня М кривую I J/ (л;), то перемещение каретки 4 будет пронорциональнс интегралу Стильтьеса
г/ 5 tgprf 4 {х) + Уо(2)
В дальнейщем будем рассматривать именно этот случай, считая предыдущий частным случаем, соответствующим значению ё 4 (х) X, которое может быть получено также перемещением щтифта но наклонной прямой.
Итак, если величина tg р сделана нронорциональной значению подынтегрального выражения при любом значении независимой переменной X, то при движении каретки 2 в нанравлении оси А карандащ. прикрепленный к каретке 4, опишет относительно неподвижной плоскости чертежа интегральные кривые (2).
Это достигается следующим путем.
Штифт С, прикрепленный к стержню 6, под действием волоска 9 постояпис упирается в левую кромку смепного лекала 15, прикреплениогс на контрольных щтифтах и каретке 3.
Последняя, в свою очередь, посредством пружины 16 постоянно притягивается в направлении слева направо, так что правая кромка лекала 15 постоянно прижимается к штифту В, нрикренленному к каретке 5.
Если правая кромка лекала 15 очерчена по некоторой кривой gij} (и), а левая кромка - по криво п А (у), то постоянно следующее
,1 г- / г --- Ti i (v) + X (v)
соотношение: tg a r (xy) ;
aaa
1 Г7/ I (i) + ()
sm« - F(y} ,
где: R - есть расстояние от щтифта D до оси вращения стержня 7.
Следовательно, если при двилчении каретки 1 в направлении оси X .штифтом А каретки 5 одновременно обводит неподвижную кривую 1/ f (л:), а штифтом Е стержня 12 - кривую Е 4 (л:), то карандаш или рейсфедер, прикренленный к каретке 6, опишет кривые (2).
Возможны следуюшие основные способы использования прибора: 1) При тангенсной схеме настройки, т. е. при закреплении штифта Д на стержне 6 и скольжения его вдоль стержня 7, формула (2) примет вид
, 5.g(«±,).rfl4W + , Si gi±irf.Wi+,. (3)
хохо
тде m tg Y const.
В случае Y О интеграл (3) принимает вид
XX
у с У7 (у) dl., (х) + уо i (У) + 9 И Т W + Уо (4) а Jа J
хохо
в случае v получим
а ----Г77ТГ ()
2) при синусной схеме настройки, т. е. закреплении штифта D на «стержне 7 и скольжения его вдоль стержня 6, получим
XX/
г,/ 1 f sind -t- /и V 1 sin 2 я J г / i I
У tg(« + T)9(-) +УО ) + V
jjljj Q V 1 Sn2a + OTSind .вра а
ЛЬ 970 И
г ,,,
J Jr(y) + (A:) Подставив вместо sin a его значение, получаем у().(;с)1 + у„,(6) хо у /1 - (лгу) + (ху} где f (г/) (г/) + ф / (л ). В частности, когда m О и m со Соответственно получаем: + Уо(7) () (;c) + yo(8) х-о (0 3) Связав стержень 5 с помош,ью рейки непосредственно с осью ения стержня 7, получаем круговую схему настройки, при которой k-F (ху), k const.
№ 97011 4 -
При этой настройке прибор вычертит кривые
XX
(d± T)9W + Уо 5 tg F(xy) + т rf () + У о (9)
хохо
4) На ось колесика 5 насаживаем счетный барабанчик. Тогда, нри любой схеме настройки этот счетчик покажет величину, пропорциональную длине вычерченной интегральной кривой, т. е. интегралу вдоль
кривой:;
/1 + Z(10)
в частном случае, нри г/i f (х) tg х получает величину, пропорциональную значению эллинтического интеграла 2-го рода в форме Лежандра. При у f (х) cos х получаем значения эллиптического
интеграла 1-го рода и т. д.
Возможны также и другие способы использования прибора.
Предмет изобретения
Интеграф, содержащий цилиндр, поворачивающийся вокруг своей оси на угол, значение которого функционально зависит от перемещения интеграфа, и приводящий во вращение колесико с острой кромкой, и подвижное лекало, перемещающее механизм, обеспечивающий поворот колесика в функции синуса или тангенса от аргумента, пропорционального перемещению стержня, скользящего по лекалу, отличающийся тем, что, с целью упрощепия интеграфа и уменьшения его габаритов, каретка, несущая, колесико и снабженная пищущим устройством, выполнена подвижной вдоль оси цилиндра.

| название | год | авторы | номер документа |
|---|---|---|---|
| Вводное устройство функции у (Х+-t) с отклоненным аргументом t для функциональных интеграфов | 1957 |
|
SU113488A1 |
| Полярный интеграф | 1958 |
|
SU120653A1 |
| Функциональный дифференцио-интеграф | 1955 |
|
SU118616A1 |
| ФУНКЦИОНАЛЬНЫЙ ИНТЕГРИМЕТР | 1968 |
|
SU212562A1 |
| Интегриметр | 1954 |
|
SU103377A1 |
| Радиальный интегриметр | 1954 |
|
SU102756A1 |
| Интегратор | 1949 |
|
SU93267A1 |
| Прибор для гармонического синтеза | 1955 |
|
SU115898A1 |
| Устройство для интегрирования и дифференцирования кривых | 1937 |
|
SU61120A1 |
| Устройства для интегрирования и дифференцирования кривых | 1937 |
|
SU61746A1 |