1;
Предлагаемый функциональный йнтегриметр предназначен для обработки информации, поступающей в виде графиков, например кривых автоматической записи, и механизации вычислений интегралов функций, заданных в виДе кривых.
Для тех же целей предназначены аналоговые механические приборы типа планиметров, интеграторов.
Известные функциональные интегриметры содержат основную, обводную и функциональные каретки и интегрирующее звено с обоймой, интегрирующим колесом и контактирующим с ним цилиндром.
В качестве интегрирующего звена используется, например, колесо типа Амелера, или колесо типа Абданка. В интегриметрах с колесом типа Амелера колесо,скользит и катится по горизонтальной плоскости, в приборах с интегрирующим звеном типа колеса Абданка колесо перемещается вдоль образующей цилиндра. Составляющая силы трения между кромкой интегрирующего колеса и поверхностью цилиндра, направленная перпендикулярно образующей, вызывает угловое перемещение цилиндра, пропорциональное значению интеграла вида:
Особенность предлагаемого интегриметра заключается в том, что на оси цилиндра установлено тормозное устройство, предотвращающее при необходимости вращение цилиндра вокруг своей оси, т. е. интегрирующее колесо, контактирующее с поверхностью цилиндра, используется и по схеме колеса Амелера и по схеме колеса Абданка, что позволяет увеличить число задач, рещаемых при помощи одного и того же прибора.
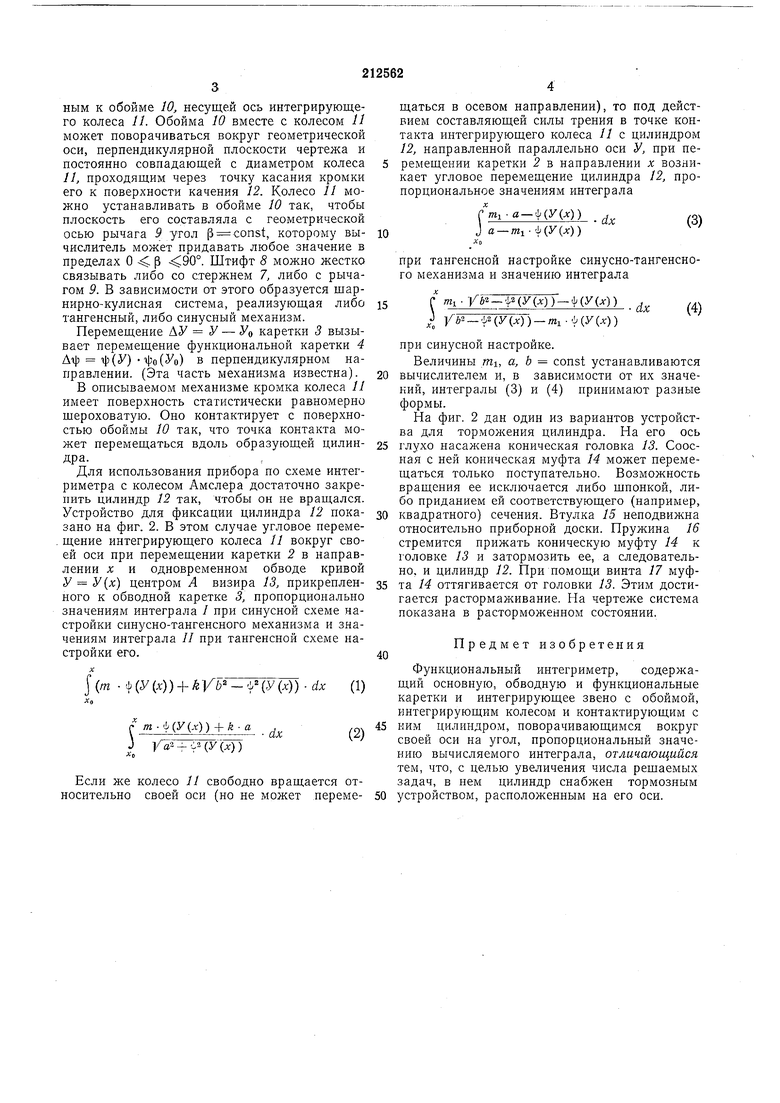
На фиг. 1 приведена принципиальная схема интегриметра; на фиг. 2 - тормозное устройство в разрезе. Относительно приборной доски 1 в направлении X под действием небольшого усилия перемещается основная каретка 2. Относительно нее перемещается обводная каретка 3 в направлении У и функциональная каретка 4, в направлении к, которая, например, при помощи пружины, постоянно стремится к перемещению слева направо. При этом правая, очерченная в общем случае по кривой 1(3 а|5(У) кромка сменного лекала 5, лсестко прикрепляемого к каретке 4, постоянно прижимается к щтифту 6, фиксируемому на обводной каретке 3. С кареткой 4 жестко связан стержень 7 с прорезью, геометрическая ось которой параллельна оси У. При помощи щтифта 8 стержень 7 может быть щарнирно
ным к обойме 10, несущей ось интегрирующего колеса //. Обойма 10 вместе с колесом 11 может поворачиваться вокруг геометрической оси, перпендикулярной плоскости чертежа и постоянно совпадающей с диаметром колеса 11, проходящим через точку касания кромки его к поверхности качения 12. Колесо 11 можно устанавливать в обойме 10 так, чтобы плоскость его составляла с геометрической осью рычага 9 угол Р:: const, которому вычислитель может придавать любое значение в пределах О ; р . Штифт 8 можно жестко связывать либо со стержнем 7, либо с рычагом 9. В зависимости от этого образуется щарнирно-кулисная система, реализующая либо тангенсный, либо синусный механизм.
Перемещение АУ У - УО каретки 3 вызывает перемещение функциональной каретки 4 Aij; T|3(y) (1(Уй) в перпендикулярном направлении. (Эта часть механизма известна).
В описываемом механизме кромка колеса 11 имеет поверхность статистически равномерно щероховатую. Оно контактирует с поверхностью обоймы 10 так, что точка контакта может перемещаться вдоль образующей цилиндра.
Для использования прибора по схеме интегриметра с колесом Амслера достаточно закрепить цилиндр 12 так, чтобы он не вращался. Устройство для фиксации цилиндра 12 показано на фиг. 2. В этом случае угловое перемещение интегрирующего колеса 11 вокруг своей оси при перемещении каретки 2 в направлении X и одновременном обводе кривой У У(л;) центром Л визира 13, прикрепленного к обводной каретке 3, пропорционально значениям интеграла / при синусной схеме настройки синусно-тангенсного механизма и значениям интеграла // при тангенсной схеме настройки его. X (т Ь (У (х ) + k 1/F - 6° (У (.г)) dx (1) (y{x))+k-a /«2 - V- (У i;: Если же колесо 11 свободно вращается относительно своей оси (но не может перемещаться в осевом направлении), то под действием составляющей силы трения в точке контакта интегрирующего колеса 11 с цилиндром 12, направленной параллельно оси У, при перемещении каретки 2 в направлении х возникает угловое перемещение цилиндра 12, пропорциональное значениям интеграла
т,-а-(У(х})
Г MIJ а -
(У(х))
при тангенсной настройке синусно-тангенсного механизма и значению интеграла
С ш1-1 б -|ЧУ())-(У()) . . (4)
j }ГЬ---(У(х))(У(х))
при синусной настройке.
Величины /Пь а, b const устанавливаются
вычислителем и, в зависимости от их значений, интегралы (3) и (4) принимают разные формы.
На фиг. 2 дан один из вариантов устройства для торможения цилиндра. На его ось
глухо насажена коническая головка 13. Соосная с ней коническая муфта 14 может перемещаться только поступательно. Возможность вращения ее исключается либо щпонкой, либо приданием ей соответствующего (например,
квадратного) сечения. Втулка 15 неподвижна относительно приборной доски. Пружина 16 стремится прижать коническую муфту 14 к головке 13 и затормозить ее, а следовательно, и цилиндр 12. При помощи винта 17 муфта 14 оттягивается от головки 13. Этим достигается растормаживание. На чертеже система показана в расторможенном состоянии.
Предмет изобретения 45 50 функциональный интегриметр, содержаЩий основную, обводную и функциональные каретки и интегрирующее звено с обоймой, интегрирующим колесом и контактирующим с ним цилиндром, поворачивающимся вокруг своей осн на угол, пропорциональный значению вычисляемого интеграла, отличающийся тем, что, с целью увеличения числа решаемых задач, в нем цилиндр снабжен тормозным устройством, расположенным на его оси.
(Риг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Полярный интеграф | 1958 |
|
SU120653A1 |
| Интегриметр | 1954 |
|
SU103377A1 |
| Интеграф | 1949 |
|
SU97011A1 |
| Вводное устройство функции у (Х+-t) с отклоненным аргументом t для функциональных интеграфов | 1957 |
|
SU113488A1 |
| Функциональный дифференцио-интеграф | 1955 |
|
SU118616A1 |
| Радиальный интегриметр | 1954 |
|
SU102756A1 |
| Интегриметр | 1948 |
|
SU84993A1 |
| Интегратор | 1938 |
|
SU56663A2 |
| МОМЕНТНЫЙ ИНТЕГРИМЕТР | 1970 |
|
SU268024A1 |
| Механизм для графического интегрирования | 1980 |
|
SU951324A1 |
12
Ч1- 16 /5 /7
