11
Изобретение относится к контрольно-измерительной технике, нредназна- чено для измерения усилий, действующих как раздельно, так и совместно, и может быть использовано при силомо ментном очувствлении роботов различного назначения в металлургии, машиностроении, приборостроении и др.
На фиг. 1 приведена конструкция датчика; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - оси х, у., z.
Датчик содержит основание 1 , жестко скрепленное в центре с каркасом 2, фланец 3, накладные вихретоко вые преобразователи 4-6 перемещений, корпус 7 в виде металлической втулки скрепленной торцовой поверхностью с фланцем 3., а со стороны другого торца - с каркасом 2 посредством упругой мембраны 8, и токопроводя- щий элемент 9, установленный по центру фланца 3. Преобразователи 4 и 5 размещены на торце каркаса 2, обращенном к фланцу 3, в ортогональных относительно друг друга направлениях например, совпадающих с направлениями осей X, у и Z декартовой системы координат. Преобразователь 4 установлен вдоль оси симметрии датчика (центральное направление) и взаимодействует с внутренней поверхностью элемента 9, а преобразователи 5 и 6 установлены вдоль осей х и у (диаметральные направления) и взаимодействуют с внутренней поверхностью корпуса 7. Токопроводящий элемент 9 размещен на фланце 3 по его оси, при этом внутренняя поверхность элемента 9, обращенная к преобразователю 4, чувствительному в центральном направлении, имеет форму вогнутой сферь, центр которой лежит в точке пересечения мембраны 8 с осью симметрии датчика. Преобразователи 4-6 предназначены для измерения зазоров 5. 5j и 5у до внутренних поверхностей элемента 9 и корпуса 7 соответственно. Сферическая поверхность элемента 9 с центром в точке- пересечения мембраны 8 и оси датчика обеспечивает постоянство зазора 5 между элементом 9 и преобразователем 4, а следовательно, инвариантность выходного сигнала преобразователя 4 при воздействии на датчик векторов сил F и Fy . Для обеспечения инна- риантности выходных сигналом (постоянство зазоров 5 и SY между поверх
НОСТ11Ю корпуса 7 и нрообразовгателн- ми 5 и 6) преобразо1 ателей 5 и 6 при воздействии па датчик векторов сил F, Fy F-, F соответственно
5 внутренняя поверхность корпуса 7
в зонах магнитного контакта с преобразователями 5 и 6 выполнена плоской и нормально последним. Перемещение элемента 9 и корпуса 7 относительно
0 преобразователей 4 - 6 от воздействия нагрузок обеспечивается упругой мембраной 8. Конструкция мембраны 8 быть как плоской, так и гофрированной .
5 Перед эксплуатацией датчика вихре- токовые преобразователи 4-6 запи- тывают током переменной частоты, жестко закрепляют датчик основанием 1 к месту (Фазирования, а на фланец 3
20 воздействуют главным вектором силы F, проекциями которого по осям z, X и у являются три компонента F,F ,
F,.
При воздействии вектора силы F,
25 направленного по оси z симметрии датчика, мембрана В деформируется симметрично относительно своего нейтрального положения либо в одну сторону, либо в другую в зависимости от направления действия вектора силы F, вследствие чего элемент 9 либо удаляется, либо приближается нормально к преобразователю 4, вызывая изменение зазора 5, а вместе с тем выходного сигнала преобразователя 4. По
5 значению модуля этого сигнала судят о величине силы F., а по полярности знака сигнала судят о направлении.
При воздействии вектора силы F, направленного по оси х датчика,
мембрана 8 деформируется относительно плоскости, проходящей через оси z и у, асимметрично, вызывая изменение зазора 5 между преобразователем 5 и внутренней поверхностью корпуса 7 в зоне его магнитного контакта с преобразователем 5, следовательно, изменение выходного сигнала преобра- зов.ателя 5. По значению мсздуля этого сигнала судят о величине вектора
50 силы F,a по полярности знака сигнала судят о направлении. При воздействии вектора силы ег п параметры определяются аналогично вектору силы Fy .
45
55
Формула изобретения
Силомоментный датчик, содержащий соосно расположенные ос-люиание с кар31
касом в центре, фланец, накладной вихретоковый преобразователь перемещения с токопроводящим элементом, скрепленный торцовой поверхностью с фланцем, а со стороны другого торца - с каркасом посредством упругой мембраны, отличающийся тем, что, с целью повышения точности, в него введены два накладных вих- ретоковых преобразователя перемещения и полый цилиндрический токопрово- I
100724
дящий корпус, токопроводящий элемент выполнен в виде вогнутой сферы, центр которой лежит в точке пересечения оси датчика с упругой мембраной, 5 на внутренней поверхности корпуса выполнены две лыски, плоскости которых взаимно перпендикулярны, а введенные накладные вихретоковые преобразователи установлены на каркасе 10 перпендикулярно друг другу и перпендикулярно плоскостям лысок.
фиг. 1
35
О
Фиг.З
Составитель В.Годзиковский Редактор О.Юрковецкая Техред А.БОЙКО Корректор В.Бутяга
Заказ 512/52Тираж 778Подписное
БНИИ1ТИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва,.Ж-35, Раушская наб., д. 4/5
Филиал ППГ1 Патент, г.Ужгород, ул.Проектная, 4
Фиг.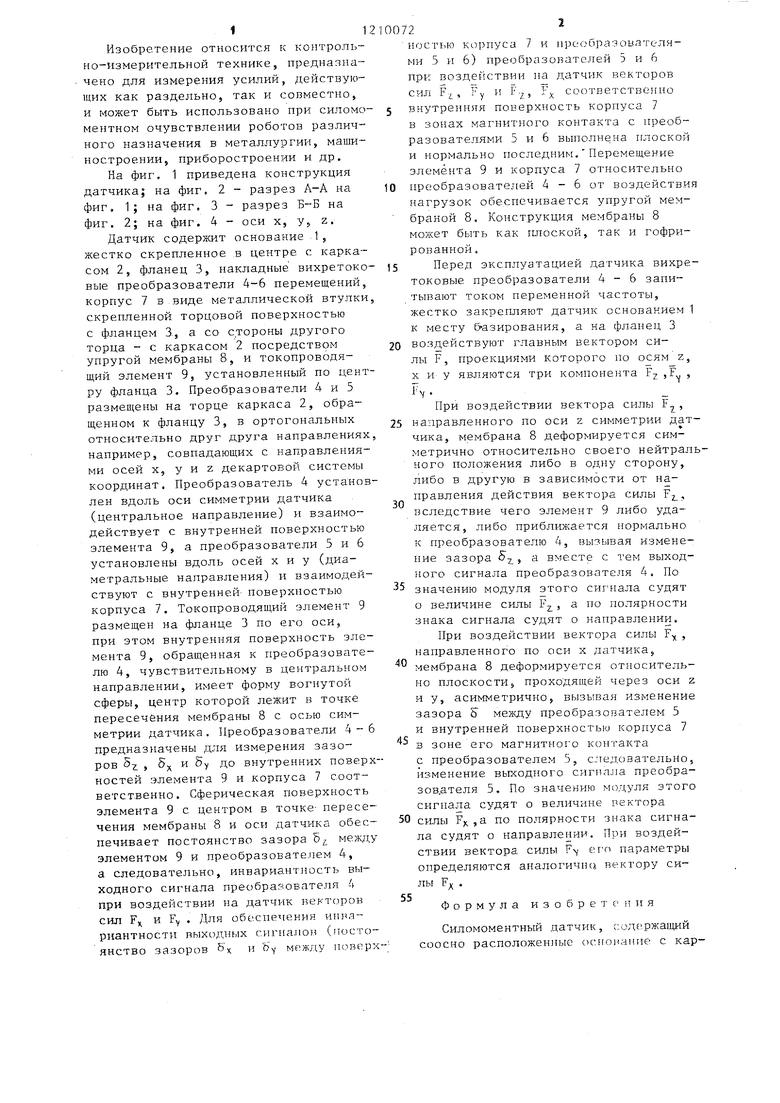
| название | год | авторы | номер документа |
|---|---|---|---|
| Накладной датчик к токовихревому дефекто-СКОпу | 1979 |
|
SU798582A1 |
| ПЬЕЗОРЕЗОНАНСНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ | 2004 |
|
RU2282837C2 |
| Силомоментный датчик | 1984 |
|
SU1216680A1 |
| Силомоментный датчик | 1983 |
|
SU1155878A1 |
| Электромагнитный датчик виброускорений | 1977 |
|
SU622013A1 |
| Детектор вихрей | 2017 |
|
RU2672819C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЙ ИЗДЕЛИЯ И ЭЛЕКТРОФИЗИЧЕСКИХ СВОЙСТВ ЕГО МАТЕРИАЛА | 2005 |
|
RU2294535C1 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК СИЛОВЫХ ВОЗДЕЙСТВИЙ | 2003 |
|
RU2251670C2 |
| Устройство для динамических испытаний опор скольжения | 1985 |
|
SU1296869A1 |
| ЧАСТОТОРЕЗОНАНСНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ И ЧАСТОТОРЕЗОНАНСНЫЙ ДАТЧИК ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ | 2017 |
|
RU2690699C1 |

Изобрете ие может быть использовано при силомоментном очувствлении роботов различного назначения в металлургии, машиностроении, приборостроении. Целью изобретения является повышение точности датчика. На жестко скрепленном с основанием 1 каркасе 2 размешены накладные вихре- токовые преобразователи перемещений, причем преобразователь 4 установлен вдоль оси симметрии датчика, а преобразователи 5 и 6 закреплены перпендикулярно друг другу. На фланце 3 установлен токопроводящий элемент -9, внутренняя поверхность которого имеет форму вогнутой сферы, центр которой лежит в точке пересечения мембраны 8 с осью симметрии датчика, что обеспечивает постоянство зазора между элементом 9 и преобразователем 4. При воздействии вектора силы мембрана, деформируясь, изменяет этот зазор и выходной сигнал соот- ветствуюш;его преобразователя. По значению модуля этого сигнала судят о величине действующей на датчик силы, а по полярности знака сигнала судят о направлении. 4 ил. (Л с: А-А ю vi ьо 
| Аэродинамические внутримодельные тензометрические весы | 1972 |
|
SU449252A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электромагнитный преобразователь усилий сжатия | 1982 |
|
SU1083079A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
