Изобретение относится к измерительной технике, в частности к многокомпонентным датчикам для измерения силовых воздействий, и может быть использовано в автомобильном и железнодорожном транспорте, при осуществлении испытаний транспортных средств, в робототехнических системах, в системах управления, сигнализации и телеизмерений, для измерения массы грузов.
Уровень техники
В настоящее время методы и средства электрических измерений неэлектрических величин находят все большее применение в науке и технике. Часто перед исследователями встает задача измерения нескольких составляющих силовых факторов одним измерительным средством. В подавляющем большинстве для этого используются магнитные или датчики с тензопреобразователями. Множество датчиков наклеивают на воспринимающие силовые факторы поверхности с соблюдением условия независимости измеряемых составляющих.
В отечественной патентной литературе описан двухкомпонентный преобразователь силы (см. RU 2168709), который представляет собой магнитоупругий чувствительный элемент, содержащий обмотку возбуждения и две обмотки измерения. Плоскость, в которой расположена обмотка измерения горизонтальной компоненты вектора силы, лежит на оси вертикальной компоненты вектора силы и повернута относительно оси горизонтальной компоненты вектора силы на угол 45°. Плоскость, в которой расположена обмотка измерения вертикальной компоненты вектора силы, лежит на оси горизонтальной компоненты вектора силы и повернута относительно оси вертикальной компоненты вектора силы на угол 45°. Вектор нормали плоскости, в которой расположена обмотка возбуждения, параллелен линии пересечения плоскостей измерительных обмоток. За счет расположения обмоток в ортогональных плоскостях уменьшаются геометрические размеры преобразователя и количество обмоток и повышается надежность преобразователя. Однако, как очевидно, такой датчик позволяет получить информацию только о двух составляющих воздействия.
В каталоге МГТУ им. Н.Э. Баумана Научно-технические разработки, М., ВНИИТЭМР, 1991, с.29-31 приведены сведения о шестикомпонентном датчике силовых воздействий “Динасенс”, предназначенном для пропорционального преобразования усилий, действующих на рабочие органы промышленного робота или технологическое оборудование, в электрический сигнал в аналоговой и цифровой форме. Датчик состоит из механического преобразователя со встроенным блоком аналоговой предварительной обработки и контроллера. Датчик реализован на тензометрических чувствительных элементах, а контроллер осуществляет первичную обработку цифровой информации. Однако этот прибор измеряет силовые факторы в небольшом диапазоне и поэтому не может быть применен при испытаниях транспортных средств, где развиваются значительно большие нагрузки.
В зарубежной патентной литературе описаны многочисленные многокомпонентные датчики силовых воздействий, в частности, используемые в автомобильной испытательной технике.
В патенте США 6038933 раскрыт корпус нагрузочного элемента для измерения составляющих силы и момента в нескольких направлениях. Он включает интегральный узел, имеющий твердую центральную втулку и твердый кольцевой элемент, соосный с центральной втулкой. По крайней мере три радиальных трубки простираются радиально по соответствующим продольным осям от центральной втулки до кольцевого элемента. Гибкие элементы присоединяют радиальные трубки к кольцевому элементу. Каждый гибкий элемент совместим с перемещением каждой соответствующей радиальной трубки по соответствующей продольной оси. Датчик напряжения, установленный на каждой радиальной трубке, измеряет напряжение.
Нагрузочный элемент по патенту США 5969268 для измерения составляющих сил и моментов относительно ортогональной системы координат включает корпус и множество цепей датчика. Корпус содержит жесткий центральный элемент, жесткое кольцо и множество радиальных элементов, расположенных радиально и соединяющих центральный элемент с кольцевым элементом. Множество датчиков установлено на радиальных элементах. Каждый радиальный элемент включает первый датчик, обеспечивающий первый выходной сигнал, чувствительный к первой силе, проявляющейся между центральным элементом и кольцевым элементом через соответствующий радиальный элемент в первом направлении. Каждый радиальный элемент также включает второй датчик, обеспечивающий второй выходной сигнал, чувствительный ко второй силе, действующей между центральным и кольцевым элементом через соответствующий радиальный элемент во втором направлении, причем второе направление - перпендикулярно первому направлению.
В патенте США 5821432 измерительный прибор для измерения сил и моментов имеет многокомпонентные силоизмерительные элементы, размещенные попарно встречно на обеих сторонах воспринимающей силу платформы или монтажной плиты, в направлении их чувствительности к растяжению/давлению. Противоположные силоизмерительные элементы предварительно нагружены общим создающим предварительное нагружение винтом, ориентированным в направлении их чувствительности к растяжению/давлению и проходящим через платформу без трения. Противоположные силоизмерительные элементы имеют противоположно ориентированные оси чувствительности. Измерительные сигналы растяжения/давления, являющиеся результатом температурных изменений, имеющих место в монтажной плите и/или в общем создающем предварительный натяг винте, исключаются противоположными измерительными элементами, в то время как измеренные величины, развиваемые силами, действующими в одном направлении складываются. Недостатки всех перечисленных конструкций состоят в технологической сложности наклейки прецезионных тензорезисторов, их большом количестве, необходимости высокой точности изготовления силовоспринимающих упругих элементов, очень сложно создать конструкцию, обладающую реальной компактностью. Из-за особенностей формы упругих элементов каждое из измеряемых перемещений зависит от нескольких силовых факторов, в связи с чем наблюдается взаимное влияние каналов устройства. Так, например, прогиб упругого элемента зависит как от силы, так и от момента. С целью снижения такого влияния применяются шарнирные соединения. Однако они увеличивают гистерезис конструкции, и таким образом снижают точность.
Наиболее близким по технической сущности и достигаемому результату к заявленному датчику является изобретение по патенту США 5437196А, где раскрыт детектор силы для измерения составляющих сил и моментов относительно соответствующих осей в ортогональной системе координат XYZ. Силовоспринимающий элемент (10) содержит пластину в форме диска (11) и пиляр (12) квадратного сечения. На верхней поверхности корпуса силовоспринимающего элемента (10) сформированы пять дисковых электродов (D1-D5). Кроме того, на четырех поверхностях пиляра (12) размещены восемь перемещаемых электродов (D6 к D13). Корпус подвешен внутри фиксированного тела. Внутри фиксированного тела напротив электродов силовоспринимающего элемента размещены неподвижные электроды. Таким образом соответствующими парами электродов образованы емкостные чувствительные элементы. На основании изменений емкостей определяются составляющие силы Fx, Fy, Fz по соответствующим осям и составляющие моментов Mx, My, Mz относительно соответствующих осей.
Недостатком такой конструкции является невысокая точность измерений ввиду паразитных моментов, возникающих в точке приложения силового фактора. Такие моменты вызывают относительные перемещения, сходные с теми, которые вызываются измеряемыми нагрузками. Следовательно, в результаты измерений вносится неопределенность, которую трудно исключить методологически. Трудно технологически осуществить подвеску упругого элемента внутри неподвижного корпуса. Устройство включает большое количество датчиков, что приводит также и к усложнению алгоритма обработки воспринимаемых сигналов.
Сущность изобретения
Таким образом встает задача создания высокочувствительного многокомпанентного датчика силовых факторов, позволяющего измерять составляющие сил и моментов в широком диапазоне с высокой точностью и чувствительностью, технологичного и простого в изготовлении.
Для решения этой задачи целесообразно выбрать измерители на основе емкостных преобразователей, к особенностям которых относится высокая чувствительность и относительная стабильность показаний, незначительное влияние внешних факторов, таких как температура, положение в пространстве, внешние вибрации, простота и технологичность конструкции.
Технический результат, достигаемый при использовании заявленного изобретения по сравнению с ближайшим аналогом, состоит в повышении точности измерений, уменьшении габаритных размеров и сокращении числа используемых для измерения датчиков.
Технический результат достигается за счет того, что в многокомпонентном датчике силовых воздействий, содержащем полый корпус, первый и второй упругие элементы и датчики относительных перемещений упругих элементов, первый упругий элемент на одном конце жестко связан с корпусом, имеет второй подвижный конец и внутреннюю полость, в которой размещен подвижный элемент, жестко связанный с подвижным концом первого упругого элемента, второй упругий элемент выполнен в виде мембраны с воспринимающим силовое воздействие центром и соединен с подвижным концом первого упругого элемента с образованием полости между ними, первый - четвертый датчики перемещений попарно установлены во взаимно перпендикулярных плоскостях, проходящих через центральную ось первого упругого элемента, между неподвижным концом первого упругого элемента и свободным концом подвижного элемента, пятый-восьмой датчики перемещений установлены между корпусом и подвижным концом первого упругого элемента, размещенных также попарно во взаимно перпендикулярных плоскостях, проходящих через упомянутую центральную ось, а девятый датчик перемещений установлен в полости между подвижным концом первого упругого элемента и вторым упругим элементом в центральной области мембраны.
Кроме того, датчики относительных перемещений упругих элементов выполнены в виде емкостных датчиков, первые электроды первого - четвертого указанных датчиков фиксированы на внутренней поверхности неподвижного конца первого упругого элемента, вторые электроды - на внешней поверхности свободного конца подвижного элемента, первые электроды пятого - восьмого указанных датчиков фиксированы на внутренней поверхности корпуса, вторые электроды - на внешней поверхности подвижного конца первого упругого элемента, первый электрод девятого датчика фиксирован на торцевой поверхности подвижного конца первого упругого элемента, второй электрод - на внутренней стороне второго упругого элемента, при этом все электроды электрически изолированы от корпуса, упругих и подвижного элементов.
Кроме того, в устройство введен блок вычисления составляющих силовых воздействий, входы которого соединены с выводами датчиков и который выполнен с возможностью вычисления указанных составляющих согласно следующим соотношениям:
Z=K0Pz
Х1=K1Рx+K2My
Х2=K3Рх+K4Мy
Y1=K1Py+K2Мх
Y2=K3Рy+К4Мх,
где Z - перемещение вдоль оси Z, вызванное действием силы Pz,
X1 Х2 - перемещения вдоль оси X, вызванные действием силы Рх и момента My,
Y1, Y2 - перемещения вдоль оси У, вызванные действием силы Ру и момента Мх,
K1, K2, К3, К4 - тарировочные коэффициенты
Перечень чертежей
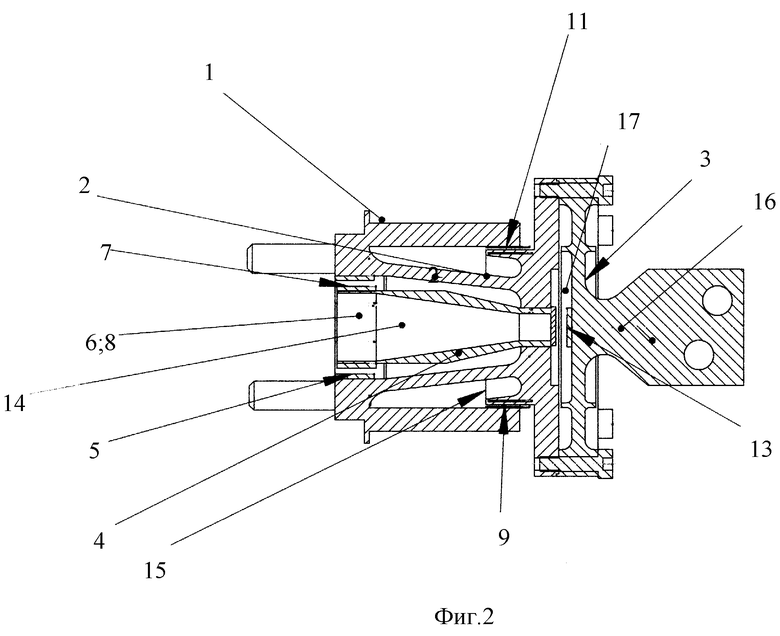
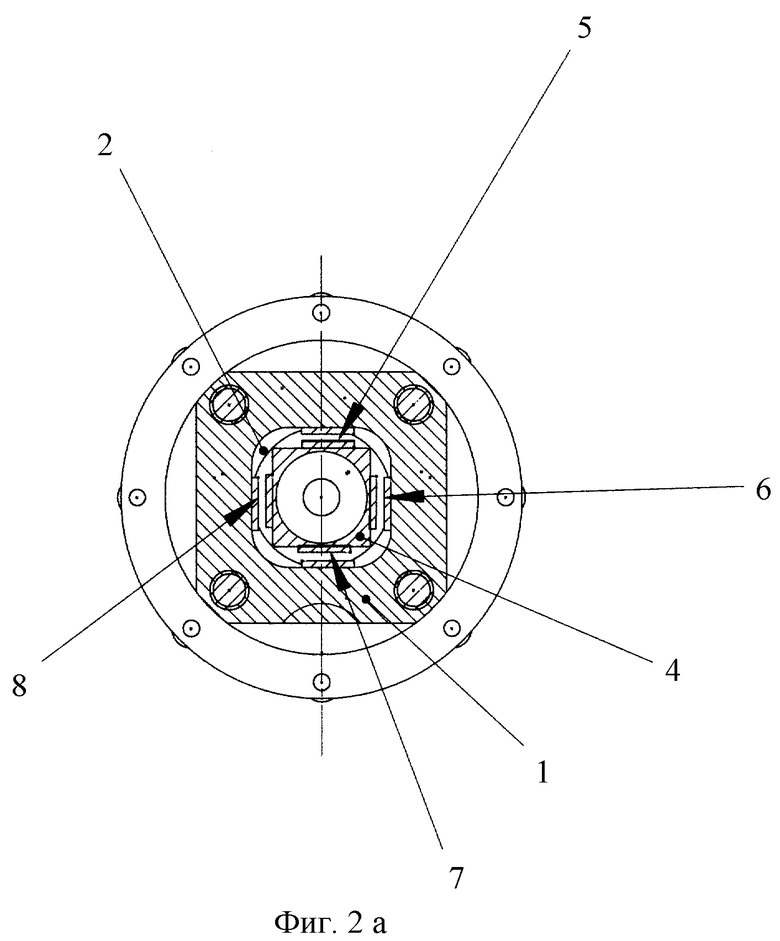
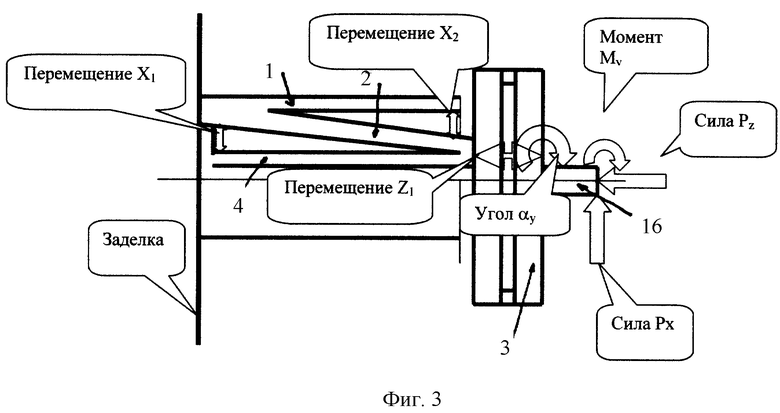
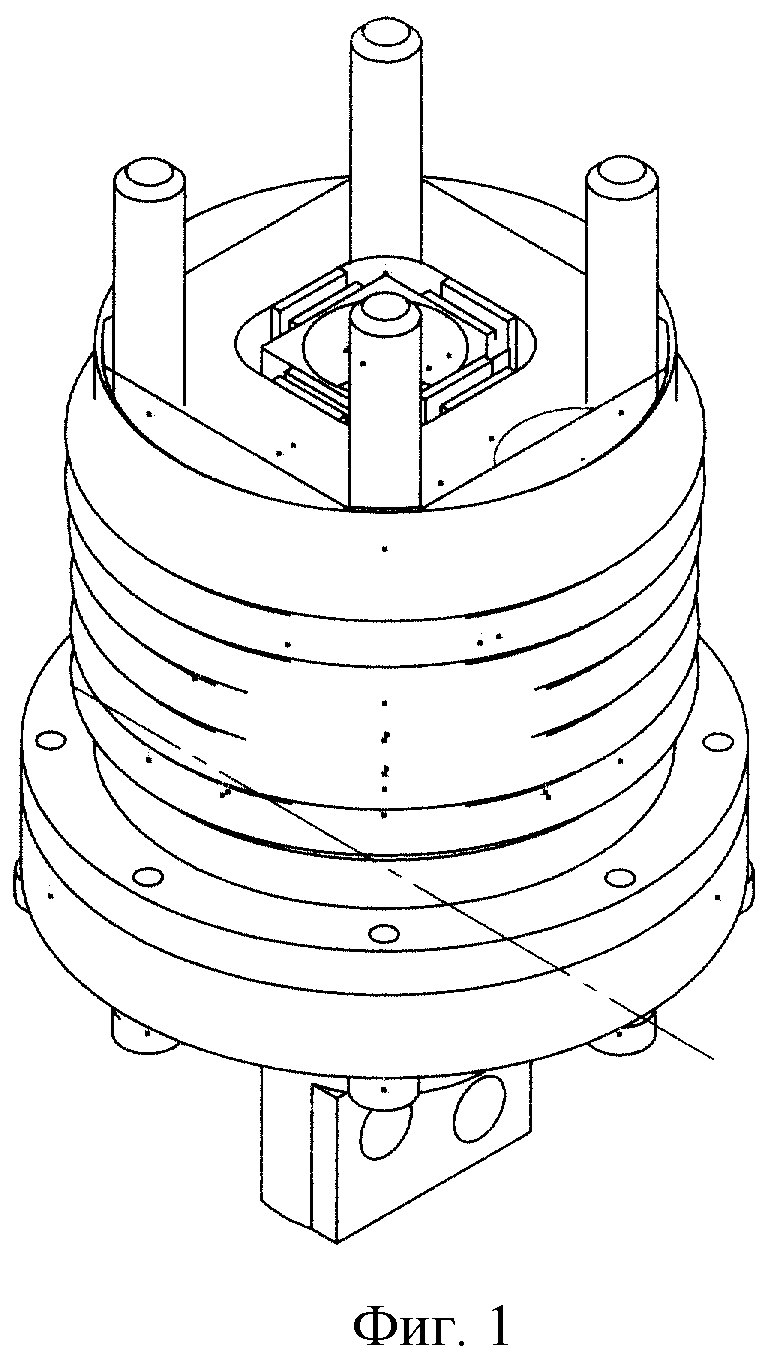
Сущность изобретения будет более понятна из описания, приведенного далее со ссылками на позиции чертежей, где на фиг.1 представлен общий вид датчика, на фиг.2 - чертеж заявленной конструкции, продольный разрез, фиг.2а - поперечный разрез, на фиг.3 - схема силовых факторов, действующих на датчик, и вызываемых ими перемещений.
Сведения, подтверждающие возможность осуществления изобретения
На фиг.2, 2а приведен чертеж заявленной конструкции. Датчик состоит из корпуса 1, имеющего предпочтительно цилиндрическую форму и изготовленного из материала с низким внутренним трением, например стали, в корпусе выполнена полость 15, в которой размещен первый упругий элемент 2, представляющий собой полый усеченный конус, верхняя часть корпуса 1 жестко соединена с концом упругого элемента 2, нижний конец элемента 2 выполнен свободным и имеет возможность перемещения. С нижним концом упругого элемента жестко соединен нижний конец подвижного элемента 4, размещенного в полости упругого элемента 2 соосно с ним и корпусом, центральная ось которого 14 является общей для этих элементов осью. Второй упругий элемент 3 выполнен в виде мембраны с центром 16, воспринимающим силовые воздействия, и соединен с первым упругим элементом 2 в нижней части. При этом между первым и вторым упругим элементами 2, 3 образована полость 17. В датчике использованы емкостные преобразователи перемещений - датчики относительных перемещений упругих элементов. Первый - четвертый датчики перемещений 5 - 8 попарно установлены диаметрально противоположно во взаимно перпендикулярных плоскостях, проходящих через центральную ось первого упругого элемента 14 между фиксированным на корпусе 1 концом первого упругого элемента 2 и свободным концом подвижного элемента 4. Пятый - восьмой датчики перемещений 9-12 установлены в нижней части корпуса между корпусом 1 и подвижным концом первого упругого элемента 2 также попарно во взаимно перпендикулярных плоскостях, проходящих через упомянутую центральную ось 14. Девятый датчик относительных перемещений 13 установлен между подвижным концом первого упругого элемента 2 и вторым упругим элементом 3 в полости, образованной между ними. Все датчики образованы двумя электродами плоской формы и установлены на параллельных друг другу поверхностях соответствующих элементов конструкции. Электроды изолированы от корпуса и упругих элементов, на которых они установлены, специальными вставками. Электрические выводы датчиков 5-12, попарно размещенных на противоположных сторонах упругих элементов, например датчиков 5 и 6, 7 и 8, соединены встречно с возможностью вычитания их сигналов, что позволяет увеличить чувствительность прибора.
Датчик заявленной конструкции предназначен для измерения трех составляющих силы Рх, Ру, Рz и двух составляющих момента Мх, Му, что определяется в основном задачами проведения стендовых испытаний ходовой части автотранспортных средств (см. фиг.3). На датчик силы в плоскости чертежа действуют 2 силы (Рх и Pz) и момент My. Силовые факторы вызывают линейные перемещения X1, X2 и Z, а также угловое αy.
Определение силовых факторов в процессе измерений ведется по следующему алгоритму. Перемещение Z пропорционально силе Pz:Z=К0Pz
Перемещение X1 пропорционально силе Рх и моменту My:X1=k1P+K2 My. Перемещение Х2 также пропорционально Рх и моменту My X2=К2Рх+К4Му. Последние 2 уравнения образуют систему уравнений, содержащую 2 неизвестных, подлежащих определению (сила и момент), коэффициенты К считаются известными, так как определяются в процессе калибровки датчика.
Аналогичная картина действия силовых факторов и вызываемых ими относительных перемещений упругих элементов может быть приведена для плоскости, перпендикулярной той, которая представлена на фиг.3. И соответственно аналогично определяются силовые факторы, действующие в плоскости, перпендикулярной плоскости чертежа.
Силовой фактор через второй упругий элемент 3 передается на первый упругий элемент 2. При этом под действием составляющих силомоментной нагрузки происходит смещение датчиков 5-13 относительных перемещений относительно друг друга с изменением расстояния между электродами. Это изменение расстояния между электродами и отслеживается электрической схемой (не приведена) и затем по соответствующим электрическим сигналам, поступившим с выводов датчиков и с использованием приведенного выше алгоритма, вычисляются составляющие силовых воздействий.
Блок вычисления составляющих силовых воздействий своими входами связан с соответствующими электрическими выводами датчиков 5-13. Блок вычисления может быть реализован на базе микропроцессора со встроенным аналого-цифровым преобразователем. Кроме того, возможно использование процессора персонального компьютера, для этого в схему включены аналого-цифровые преобразователи. Блок вычисления вычисляет составляющие силовых воздействий по формулам, приведенным выше.
Применение многокомпонентного датчика заявленной конструкции на стендовом оборудовании показало неожиданный результат, заключающийся в повышении точности измерений компонентов силовых воздействий при одновременном снижении числа измерительных элементов и упрощении процесса обработки сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛОВЫХ ФАКТОРОВ, ДЕЙСТВУЮЩИХ НА КОЛЕСО | 2003 |
|
RU2276777C2 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК СИЛЫ РЕЗАНИЯ | 2011 |
|
RU2455121C1 |
| Многокомпонентный стенд для измерения силомоментных нагрузок | 1989 |
|
SU1633296A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2025 |
|
RU2840118C1 |
| Датчик давления | 1989 |
|
SU1770790A1 |
| Способ балансировки динамически настраиваемого гироскопа | 2018 |
|
RU2690039C1 |
| Способ и устройство для испытания стрелкового оружия и/или стендовых испытаний ракетных двигателей | 2023 |
|
RU2799168C1 |
| СПОСОБ И УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ СТРЕЛКОВОГО ОРУЖИЯ И/ИЛИ СТЕНДОВЫХ ИСПЫТАНИЙ РАКЕТНЫХ ДВИГАТЕЛЕЙ | 2022 |
|
RU2790353C1 |
| ДАТЧИК РАЗНОСТИ ДАВЛЕНИЙ | 1998 |
|
RU2152013C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДАВЛЕНИЯ И РАЗНОСТИ ДАВЛЕНИЙ | 1997 |
|
RU2126533C1 |
Изобретение относится к измерительной технике, в частности к многокомпонентным датчикам, и может быть использовано на транспорте, при осуществлении испытаний транспортных средств, системах управления, сигнализации и измерений. Устройство содержит полый корпус, первый и второй упругие элементы и датчики относительных перемещений упругих элементов. Первый упругий элемент на одном конце жестко связан с корпусом, имеет второй подвижной конец и внутреннюю полость, в которой размещен подвижный элемент, жестко связанный с подвижным концом первого упругого элемента. Второй упругий элемент выполнен в виде мембраны с воспринимающим силовое воздействие центром и соединен с подвижным концом первого упругого элемента с образованием полости между ними. Первый - четвертый датчики относительных перемещений попарно установлены во взаимно перпендикулярных плоскостях, проходящих через центральную ось первого упругого элемента, между неподвижным концом первого упругого элемента и свободным концом подвижного элемента. Пятый - восьмой датчики относительных перемещений установлены между корпусом и подвижным концом первого упругого элемента, размещены также попарно во взаимно перпендикулярных плоскостях, проходящих через указанную центральную ось. Девятый датчик относительных перемещений установлен в полости между подвижным концом первого упруго элемента и вторым упругим элементом в центральной области мембраны. Технический результат заключается в повышении точности измерений, уменьшении габаритных размеров и сокращении числа используемых для измерения датчиков. 2 з.п. ф-лы, 4 ил.
Z=K0Pz,
Х1=K1Рx+K2My,
Х2=K3Рх+K4Мy,
Y1=K1Py+K2Мх,
Y2=K3Рy+К4Мх,
где Z - перемещение вдоль оси Z, вызванное действием силы Р2, X1, X2 - перемещения вдоль оси X, вызванные действием силы Рх и момента My, Y1 Y2 - перемещения вдоль оси У, вызванные действием силы Рy и момента Мх,
K1, K2, К3, К4 - тарировочные коэффициенты.
| US 5437196 А, 01.08.1995 | |||
| US 5821432 А, 13.10.1998 | |||
| US 6038933 А, 21.03.2000 | |||
| US 5969268 А, 19.10.1999 | |||
| Многокомпонентный датчик силы | 1990 |
|
SU1767367A1 |

